一、RMW基础概念
1.1 RMW定义
RMW(ROS Middleware Interface)ROS中间件接口 。它是ROS2定义的一套纯C语言标准化接口,用于抽象底层通信中间件的所有细节,为上层ROS2应用提供统一的通信原语。
用最通俗的话来说:RMW是ROS2与底层通信技术之间的"翻译官"。它让ROS2能够"说"任何通信协议的语言,而无需改变自己的"口音"。
1.2 RMW在ROS2架构中的精确位置
ROS2采用了严格的分层架构 ,每一层都有明确的职责边界,且只能调用下一层的API。RMW位于整个通信栈的核心枢纽位置 ,是连接上层ROS应用与底层通信基础设施的唯一桥梁。
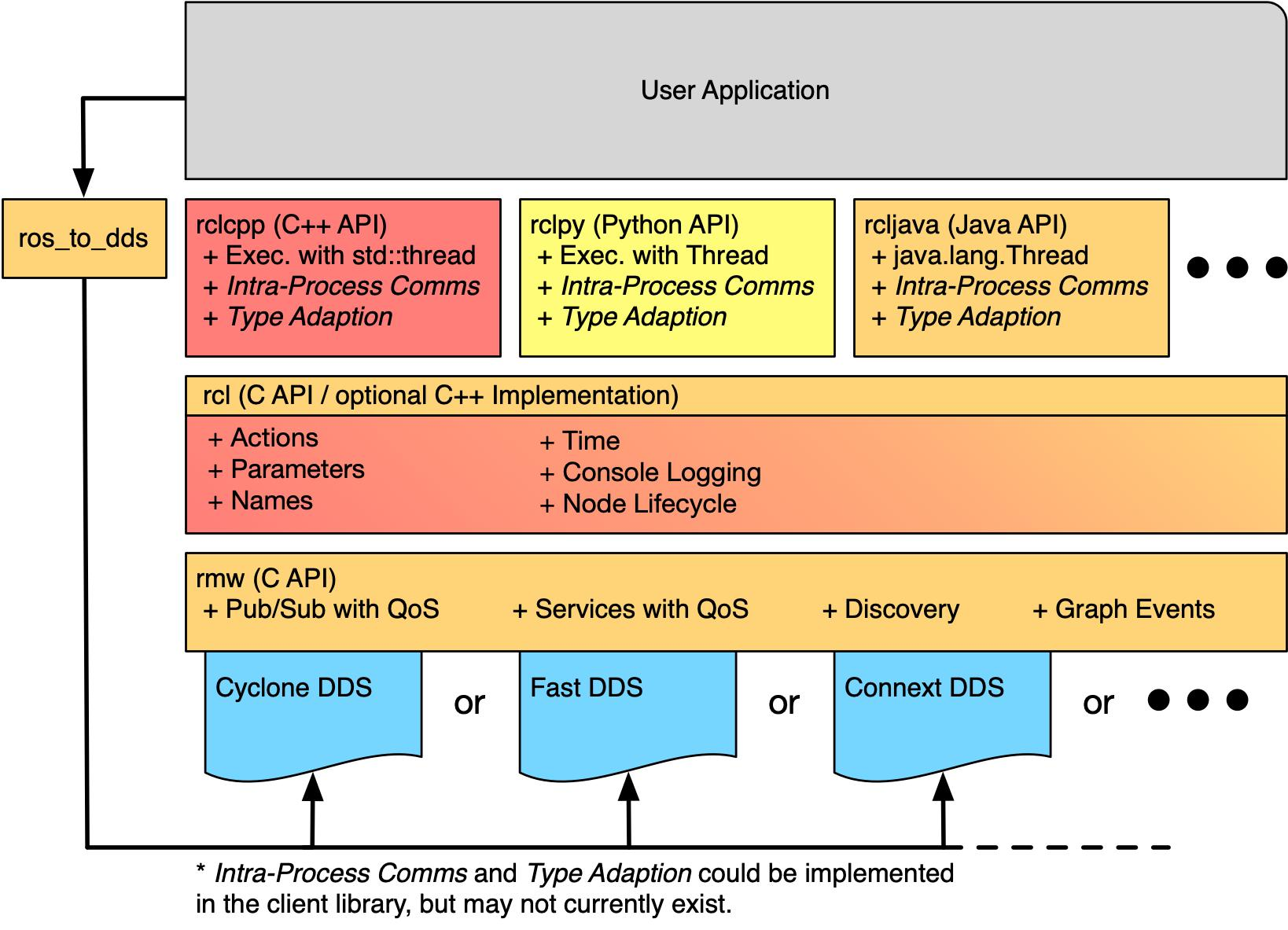
┌─────────────────────────────────────────────────┐
│ 应用层 │
│ 用户节点、rclcpp/rclpy应用、业务逻辑实现 │
├─────────────────────────────────────────────────┤
│ 语言绑定层 │
│ rclcpp、rclpy、rcljava等 │
├─────────────────────────────────────────────────┤
│ RCL层 │
│ 与语言无关的通用ROS功能(节点、话题、服务等) │
├─────────────────────────────────────────────────┤
│ RMW抽象层 │
│ 统一通信接口,屏蔽不同中间件的差异 │
├─────────────────────────────────────────────────┤
│ 通信基础设施层 │
│ Fast DDS、Cyclone DDS、Zenoh、Connext DDS等 │
└─────────────────────────────────────────────────┘关键设计要点:
- 单向依赖:上层只能调用下层,下层绝对不能依赖上层
- 最小化接口:每一层只暴露必要的API给上一层
- 类型安全:从rosidl到RMW再到RCL,全程保证类型安全
- 可替换性:任何一层都可以被符合接口规范的其他实现替换
1.3 RMW的核心价值
RMW为ROS2带来了三个革命性的变化:
-
中间件无关性:同一套ROS2代码可以在不同的通信中间件上运行,用户可以根据项目需求选择最适合的中间件。
-
工业级通信能力:通过集成DDS等工业级中间件,ROS2获得了QoS、实时性、安全性等关键特性。
-
可扩展性:未来可以轻松支持新的通信技术(如Zenoh),而无需重构整个ROS2架构。
二、RMW的设计原则
2.1 最小公共特性原则(Least Common Denominator)
RMW接口只定义所有中间件实现都能支持的功能集合。这是RMW最重要的设计原则,它确保了:
- 任何符合RMW接口的中间件都能完整支持ROS2的所有功能
- 上层应用代码在不同中间件之间具有100%的可移植性
- RMW接口保持稳定,不会因为某个中间件的特殊功能而频繁变更
代价:某些中间件的高级特性无法通过标准RMW接口访问。但ROS2允许开发者通过厂商特定的API直接调用这些特性,只是这样会牺牲可移植性。
2.2 纯C语言接口设计
RMW采用纯C语言编写接口,主要原因有:
- 最佳跨平台兼容性:C语言是唯一被所有操作系统和硬件平台支持的语言
- 最小性能开销:C语言没有运行时开销,函数调用直接映射到机器指令
- 最佳语言绑定能力:几乎所有编程语言都能调用C语言函数
- 与中间件API匹配:大多数通信中间件都提供C语言API
2.3 插件式动态加载架构
每个RMW实现都是一个独立的动态链接库 (.so/.dll/.dylib)。ROS2在运行时根据环境变量RMW_IMPLEMENTATION动态加载对应的实现库。
动态加载机制的工作原理:
rmw_implementation包作为代理,负责查找和加载实际的RMW实现- 使用操作系统的动态链接器功能(Linux下的
dlopen()和dlsym()) - 将RMW接口函数映射到实际实现库中的对应函数
- 如果某个函数在实现库中不存在,会在运行时抛出错误
优势:
- 多个RMW实现可以同时安装在同一系统中
- 无需重新编译代码即可切换中间件
- 第三方可以轻松开发和分发新的RMW实现
- 可以在运行时根据环境自动选择最佳的中间件
2.4 类型擦除与不透明指针
RMW广泛使用类型擦除 和不透明指针技术来隐藏实现细节:
- 所有RMW对象(节点、发布者、订阅者等)都以不透明指针的形式返回
- 上层代码只能通过RMW提供的函数来操作这些对象
- 实现细节完全隐藏在RMW实现库内部
- 不同RMW实现可以有完全不同的内部数据结构
c
// RMW不透明指针类型定义示例
typedef struct rmw_node_t rmw_node_t;
typedef struct rmw_publisher_t rmw_publisher_t;
// 每个不透明结构都包含一个实现特定的数据指针
struct rmw_publisher_t {
const char * implementation_identifier;
void * data; // 指向实现特定的数据结构
const rmw_node_t * node;
const char * topic_name;
// ... 其他公共字段
};三、RMW接口规范
RMW接口由一系列C头文件定义,位于ros2/rmw仓库中。截至ROS2 Jazzy版本,RMW接口包含约150个函数 和50个数据结构,覆盖了ROS2所有核心通信功能。
3.1 核心API分类
| 功能类别 | 主要头文件 | 核心函数 |
|---|---|---|
| 初始化与关闭 | rmw/init.h |
rmw_init()、rmw_shutdown()、rmw_create_context() |
| 节点管理 | rmw/rmw.h |
rmw_create_node()、rmw_destroy_node() |
| 发布者管理 | rmw/rmw.h |
rmw_create_publisher()、rmw_destroy_publisher()、rmw_publish() |
| 订阅者管理 | rmw/rmw.h |
rmw_create_subscription()、rmw_destroy_subscription()、rmw_take() |
| 服务管理 | rmw/rmw.h |
rmw_create_service()、rmw_destroy_service()、rmw_send_response() |
| 客户端管理 | rmw/rmw.h |
rmw_create_client()、rmw_destroy_client()、rmw_send_request() |
| 动作管理 | rmw/actions.h |
rmw_action_create_server()、rmw_action_create_client() |
| 等待集机制 | rmw/wait.h |
rmw_create_wait_set()、rmw_wait() |
| 守护条件 | rmw/guard_condition.h |
rmw_create_guard_condition()、rmw_trigger_guard_condition() |
| QoS策略 | rmw/qos_profiles.h |
rmw_qos_profile_check_compatible() |
| 图内省 | rmw/graph.h |
rmw_get_topic_names_and_types()、rmw_get_node_names() |
| 安全选项 | rmw/security_options.h |
rmw_get_default_node_security_options() |
3.2 错误处理机制
RMW采用统一的错误码返回机制:
- 所有RMW函数都返回
rmw_ret_t类型的错误码 - 成功时返回
RMW_RET_OK - 失败时返回对应的错误码(如
RMW_RET_ERROR、RMW_RET_INVALID_ARGUMENT等) - 可以通过
rmw_get_error_string()获取详细的错误信息
c
rmw_ret_t ret = rmw_create_node(&node, context, "my_node", "/", 0, &security_options);
if (ret != RMW_RET_OK) {
fprintf(stderr, "Failed to create node: %s\n", rmw_get_error_string().str);
return ret;
}3.3 RMW与rosidl的关系
RMW与rosidl(ROS Interface Definition Language)紧密配合,共同构成了ROS2的类型系统。
rosidl的作用:
- 定义ROS消息、服务和动作的语法
- 根据接口定义文件生成类型支持代码
- 提供序列化和反序列化的基础功能
RMW与rosidl的交互:
- rosidl编译器根据.msg/.srv/.action文件生成类型支持代码
- 类型支持代码包含消息的内存布局、序列化/反序列化函数等信息
- RMW实现通过类型支持代码了解如何处理特定的ROS消息类型
- 在创建发布者和订阅者时,必须传入对应的类型支持对象
两种类型支持模式:
- 静态类型支持:在编译时生成序列化/反序列化代码,性能更高
- 动态类型支持:在运行时通过内省机制生成序列化/反序列化代码,灵活性更高
Fast DDS提供了两种RMW实现:rmw_fastrtps_cpp(静态类型支持)和rmw_fastrtps_dynamic_cpp(动态类型支持)。
四、RMW的工作原理
4.1 动态加载与初始化流程
当启动一个ROS2节点时,RMW的初始化流程如下:
- 环境变量检查 :ROS2首先检查
RMW_IMPLEMENTATION环境变量,确定要使用的RMW实现 - 库加载 :
rmw_implementation包调用dlopen()加载对应的动态链接库(如librmw_fastrtps_cpp.so) - 符号解析 :使用
dlsym()查找并解析RMW接口函数在实现库中的地址 - 上下文创建 :调用
rmw_init()创建RMW上下文,初始化底层中间件 - 节点创建 :调用
rmw_create_node()创建ROS2节点,对应到底层中间件的DomainParticipant - 端点创建:创建发布者、订阅者等端点,对应到底层中间件的DataWriter和DataReader
4.2 节点发现机制(DDS-based RMW)
ROS2的去中心化节点发现完全由底层DDS通过RMW层实现,基于DDS标准的SPDP(Simple Participant Discovery Protocol)和SEDP(Simple Endpoint Discovery Protocol)。
参与者发现(SPDP)
- 每个ROS2节点启动时,会创建一个DDS DomainParticipant
- DomainParticipant通过UDP多播向指定Domain ID的网络发送参与者宣告消息
- 宣告消息包含:节点GUID、Domain ID、IP地址、端口号等信息
- 其他节点收到宣告消息后,将该节点加入本地的参与者列表
- 节点定期发送心跳消息,告知其他节点自己仍然在线
端点发现(SEDP)
- 当节点创建发布者或订阅者时,会创建对应的DDS DataWriter或DataReader
- 通过DDS内置主题
DCPSPublication和DCPSSubscription向网络宣告这些端点 - 端点宣告消息包含:话题名称、数据类型、QoS策略、所属参与者GUID等
- 其他节点收到端点宣告消息后,检查是否有匹配的端点
- 只有当话题名称、数据类型和QoS策略完全兼容时,发布者和订阅者才会建立通信连接
关键注意事项:
- Domain ID:ROS2默认使用Domain ID 0。不同Domain ID的节点无法相互发现
- 多播:节点发现依赖UDP多播。如果网络不支持多播,需要配置单播发现
- 防火墙:防火墙可能会阻止多播流量,导致节点无法发现
- 发现延迟:节点发现通常需要几百毫秒到几秒的时间,取决于网络规模
4.3 发布订阅完整流程
在ROS2中调用publisher->publish(msg)时,消息从发送方到接收方会经过以下完整路径:
发送方流程:
- rclcpp层将C++消息对象传递给RCL层
- RCL层进行参数验证和错误检查
- RCL层调用RMW接口函数
rmw_publish() - RMW实现将ROS消息转换为中间件特定的消息格式
- 调用底层中间件的DataWriter::write()方法发送数据
- 中间件将数据序列化并通过网络发送
接收方流程:
- 底层中间件的DataReader收到数据
- 中间件将数据反序列化为中间件特定的消息格式
- RMW实现将中间件消息转换回ROS消息格式
- RMW实现将消息放入订阅者的接收队列
- 等待集(Wait Set)检测到有消息到达,唤醒等待的线程
- RCL层调用
rmw_take()从队列中取出消息 - RCL层将消息传递给rclcpp层
- rclcpp层调用用户注册的回调函数
4.4 QoS策略映射
RMW将ROS2的QoS策略精确映射到底层中间件的QoS设置。对于DDS-based RMW,映射关系如下:
| ROS2 QoS策略 | DDS QoS策略 | 说明 |
|---|---|---|
| Reliability | RELIABILITY | BEST_EFFORT -> BEST_EFFORT RELIABLE -> RELIABLE |
| History | HISTORY | KEEP_LAST -> KEEP_LAST KEEP_ALL -> KEEP_ALL |
| Depth | HISTORY.depth | 对应KEEP_LAST的深度 |
| Durability | DURABILITY | VOLATILE -> VOLATILE TRANSIENT_LOCAL -> TRANSIENT_LOCAL TRANSIENT -> TRANSIENT PERSISTENT -> PERSISTENT |
| Deadline | DEADLINE | 对应DDS的DEADLINE.period |
| Lifespan | LIFESPAN | 对应DDS的LIFESPAN.duration |
| Liveliness | LIVELINESS | AUTOMATIC -> AUTOMATIC MANUAL_BY_TOPIC -> MANUAL_BY_TOPIC |
| Lease Duration | LIVELINESS.lease_duration | 对应租约期限 |
五、主流RMW实现对比
ROS2官方支持多种RMW实现,每种都有其独特的设计理念、性能特性和适用场景。
5.1 ROS2官方支持的RMW实现总览
| 中间件名称 | 许可证 | RMW实现包名 | 维护等级 | 支持的ROS2版本 |
|---|---|---|---|---|
| eProsima Fast DDS | Apache 2.0 | rmw_fastrtps_cpp |
Tier 1 | 所有版本 |
| Eclipse Cyclone DDS | EPL 2.0 | rmw_cyclonedds_cpp |
Tier 1 | Galactic及以后 |
| RTI Connext DDS | 商业/研究 | rmw_connextdds |
Tier 1 | 所有版本 |
| GurumNetworks GurumDDS | 商业 | rmw_gurumdds_cpp |
Tier 2 | Humble及以后 |
| Eclipse Zenoh | Apache 2.0/EPL 2.0 | rmw_zenoh_cpp |
Tier 3 | Iron及以后 |
维护等级说明:
- Tier 1:官方优先支持,所有功能都经过完整测试
- Tier 2:官方支持,但可能某些功能测试不完整
- Tier 3:社区支持,官方不提供保证
5.2 四大主流RMW实现
eProsima Fast DDS (rmw_fastrtps_cpp)
地位 :ROS2默认RMW实现(Humble及以前版本)
设计理念 :高性能、功能全面、针对机器人应用优化
核心优势:
- 性能优秀,特别是在大消息和高吞吐量场景
- 支持完整的DDS标准和所有ROS2 QoS策略
- 内置共享内存传输(Data Sharing Delivery)
- 支持静态和动态两种类型支持模式
- 活跃的社区支持和快速的问题修复
劣势: - 资源占用相对较高
- 启动时间较长
- 在某些嵌入式平台上可能不够轻量
适用场景:大多数通用机器人应用、工业机器人、自动驾驶
Eclipse Cyclone DDS (rmw_cyclonedds_cpp)
地位 :ROS2默认RMW实现(Galactic及以后版本)
设计理念 :轻量级、低延迟、资源高效
核心优势:
- 极低的延迟(局域网内可低至8微秒)
- 极小的内存占用(核心库<1MB)
- 极快的启动时间
- 高效的CPU使用率(单线程事件驱动架构)
- 对UDP多播进行了深度优化
劣势: - 大消息吞吐量略低于Fast DDS
- 共享内存依赖外部Iceoryx库
- 某些高级DDS特性支持不够完善
适用场景:嵌入式系统、资源受限设备、实时性要求高的应用
RTI Connext DDS (rmw_connextdds)
地位 :工业级标准DDS实现
设计理念 :高可靠性、安全性、可扩展性
核心优势:
- 最完整的DDS标准实现
- 工业级的可靠性和稳定性
- 先进的安全功能(DDS Security)
- 优秀的实时性和确定性
- 专业的商业技术支持
劣势: - 商业许可证昂贵(研究用途免费)
- 资源占用最高
- 学习曲线陡峭
适用场景:高可靠性要求的工业场景、航空航天、医疗设备
Eclipse Zenoh (rmw_zenoh_cpp)
地位 :下一代ROS2中间件
设计理念 :云边端一体化、低带宽、动态网络
核心优势:
- 极低的网络开销(比DDS小3-10倍)
- 优秀的广域网和无线网络性能
- 原生支持云边端架构
- 对动态拓扑网络(如多机器人系统)适应性好
- 支持多种传输协议(TCP、UDP、WebSocket等)
劣势: - 目前还是Tier 3支持,某些ROS2功能不完善
- 社区相对较小
- 与DDS的互操作性有限
适用场景:多机器人系统、云机器人、广域网分布式系统、物联网
5.3 性能对比(基于ROS2 Jazzy版本)
以下是基于官方基准测试和学术研究的性能对比结果:
| 性能指标 | Fast DDS | Cyclone DDS | Connext DDS | Zenoh |
|---|---|---|---|---|
| 最小延迟(局域网) | ~12μs | ~8μs | ~15μs | ~10μs |
| 最大吞吐量(1MB消息) | ~950MB/s | ~850MB/s | ~900MB/s | ~700MB/s |
| CPU使用率(1kHz 1KB消息) | ~15% | ~10% | ~18% | ~12% |
| 内存占用(空节点) | ~15MB | ~5MB | ~25MB | ~8MB |
| 启动时间(空节点) | ~100ms | ~30ms | ~150ms | ~40ms |
| 广域网性能 | 差 | 一般 | 一般 | 优秀 |
| 无线网络性能 | 差 | 一般 | 一般 | 优秀 |
| 动态拓扑适应性 | 一般 | 一般 | 一般 | 优秀 |
六、RMW的高级特性
6.1 共享内存传输
共享内存是进程间通信(IPC)的最高效方式,可以避免数据在网络栈中的多次拷贝。所有主流RMW实现都支持共享内存传输:
- Fast DDS:内置Data Sharing Delivery机制,无需额外依赖
- Cyclone DDS:通过集成Iceoryx库实现共享内存
- RTI Connext DDS:内置Shared Memory Transport
零拷贝技术 :现代RMW实现都支持真正的零拷贝 共享内存传输,即数据从发布者的用户空间直接传递到订阅者的用户空间,中间没有任何内存拷贝操作。这对于大消息(如点云、图像)的传输性能提升尤为显著。
6.2 安全通信(DDS Security)
RMW支持DDS Security标准,为ROS2通信提供端到端的安全保障:
- 身份认证:验证节点的身份,防止未授权节点加入网络
- 访问控制:限制节点可以发布和订阅的话题
- 数据加密:对传输的数据进行加密,防止窃听
- 数据完整性:确保数据在传输过程中没有被篡改
ROS2安全功能通过ROS_SECURITY_ENABLE环境变量启用,需要预先配置安全证书和策略文件。
6.3 实时性支持
RMW为ROS2提供了工业级的实时性支持:
- 底层DDS实现都经过实时性优化
- 支持优先级调度和确定性传输
- 可以配置为避免动态内存分配
- 支持PREEMPT_RT实时内核
硬实时能力 :GurumDDS和经过特殊优化的Fast DDS可以提供微秒级的确定性延迟,满足硬实时应用的要求。
6.4 跨平台兼容性
RMW实现了ROS2的跨平台承诺,支持以下操作系统和硬件架构:
- 操作系统:Linux、Windows、macOS、QNX、VxWorks、FreeRTOS
- 硬件架构:x86_64、ARM32、ARM64、PowerPC、RISC-V
七、RMW调试与故障排除
7.1 常用调试工具
- ros2 doctor:检查ROS2环境和RMW配置
- ros2 topic list/echo:查看话题信息和消息内容
- ros2 node info:查看节点的详细信息
- ros2 doctor --report:生成详细的系统报告
- Wireshark:捕获和分析DDS/RTPS网络流量
- Fast DDS Monitor:监控Fast DDS的运行状态
- Cyclone DDS ddsperf:Cyclone DDS的性能测试工具
7.2 常见问题与解决方案
问题1:节点无法相互发现
可能原因:
- 防火墙阻止了多播流量
- 节点使用了不同的Domain ID
- 网络不支持多播
- 不同RMW实现之间的互操作性问题
解决方案:
- 关闭防火墙或配置防火墙规则允许多播
- 确保所有节点使用相同的Domain ID
- 配置单播发现
- 确保所有节点使用相同的RMW实现
问题2:消息丢失或延迟高
可能原因:
- QoS策略配置不当
- 网络拥塞
- 接收方处理速度跟不上发送方
- 共享内存配置问题
解决方案:
- 调整QoS策略(如增加历史记录深度、使用RELIABLE可靠性)
- 优化网络带宽和拓扑
- 增加接收方的处理能力或使用多线程执行器
- 启用共享内存传输
问题3:内存泄漏
可能原因:
- RMW实现本身的bug
- 应用程序没有正确销毁RMW对象
- 消息队列溢出
解决方案:
- 更新到最新版本的RMW实现
- 确保所有ROS2对象都被正确销毁
- 调整QoS策略防止消息队列溢出
总结
- RMW是ROS2架构的基石,它通过抽象层设计实现了中间件无关性
- RMW采用纯C语言接口 和插件式动态加载架构
- 主流RMW实现包括Fast DDS、Cyclone DDS、RTI Connext DDS和Zenoh
- 每种RMW实现都有其独特的优势和适用场景
- 理解RMW的工作原理对于调试ROS2通信问题和优化系统性能至关重要
实践建议
选择合适的RMW实现
- 默认选择:Cyclone DDS(ROS2 Galactic及以后版本的默认)
- 大消息/高吞吐量:Fast DDS
- 嵌入式/资源受限:Cyclone DDS
- 工业级/高可靠性:RTI Connext DDS
- 云边端/广域网:Zenoh
性能优化建议
- 启用共享内存传输以提升进程间通信性能
- 根据消息特性合理配置QoS策略
- 避免使用过大的历史记录深度
- 对于实时性要求高的应用,使用PREEMPT_RT内核
- 定期更新到最新版本的RMW实现以获得性能改进
开发建议
- 不要直接调用RMW API,使用rclcpp或rclpy提供的高层API
- 避免依赖特定RMW实现的专有特性,以保持代码的可移植性
- 正确销毁所有ROS2对象,避免内存泄漏
- 使用ros2 doctor工具定期检查系统状态