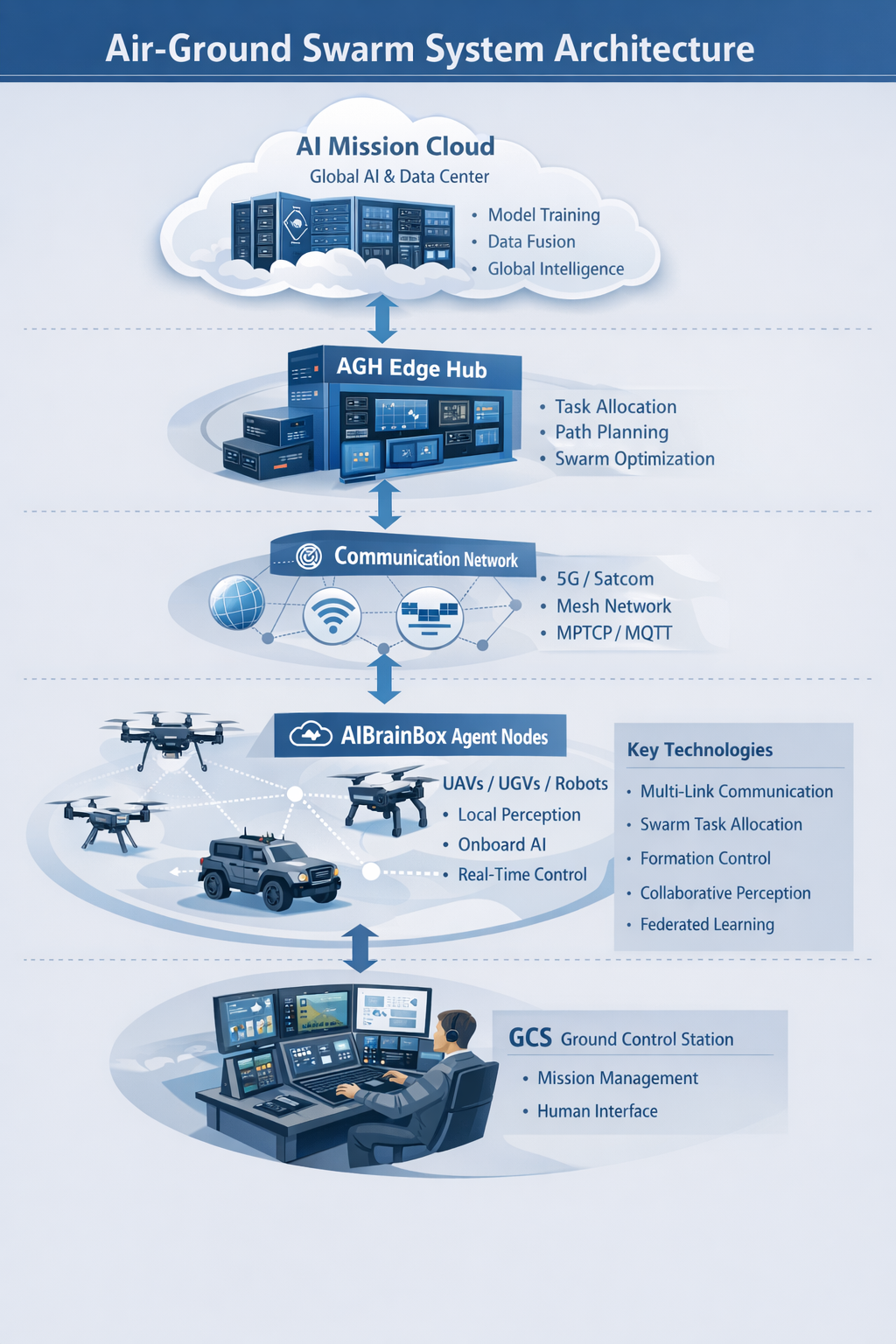
基于端(AIBrainBOX)-边(AGH)-云(AI Mission Cloud)-人(GCS)的可扩展、可协同、可演进的无人化系统体系架构USA
Unmanned Systems Architecture Framework
无人系统体系架构框架
面向低空无人系统的"分布式智能控制与协同体系",以 AIBrainBOX 为机载智能核心,以 AGH 为空地协同与 C2 中枢,以新一代 GCS 为态势与指挥界面,覆盖 UAV / UGV / USV / 机器狗,支持 GNSS 可用与拒止环境。
背景与问题
-
低空无人机从"单机"走向"系统"
-
GNSS 不可靠成为常态
-
多平台、多任务、多链路的复杂性失控
解决方案
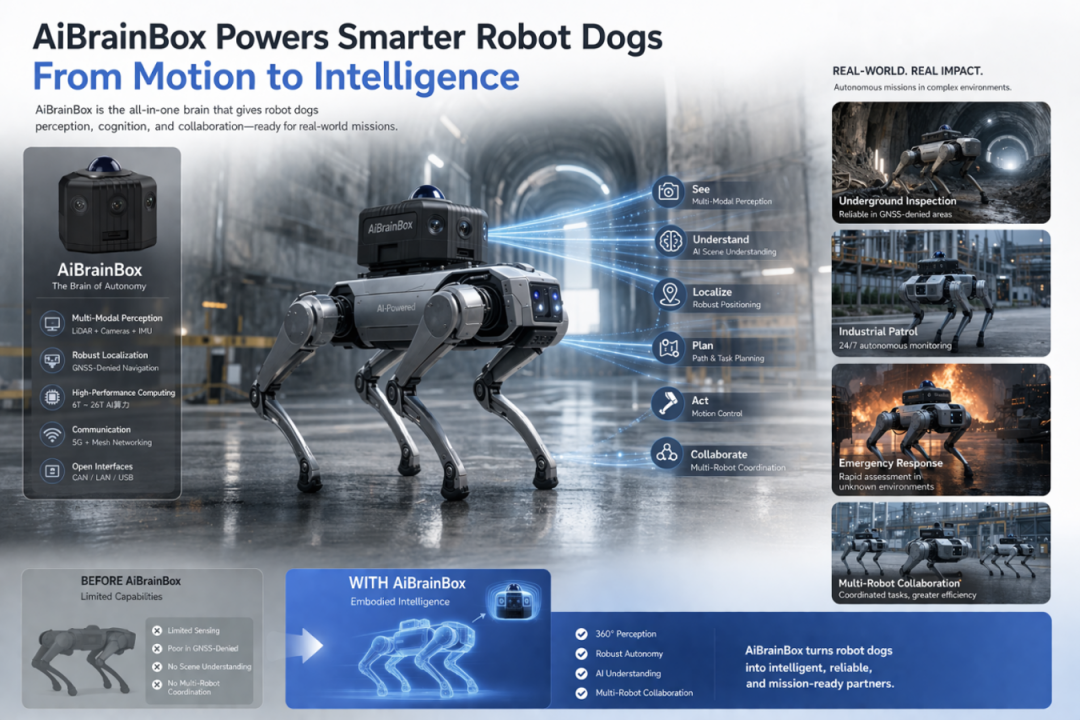
AIBrainBOX = 机载侧的"任务级飞控 + 感知 + 通信 + 数据大脑"
AGH = 空地协同与多载具系统的"通信 / 控制 / 计算枢纽"
GCS = 面向人的"态势理解与任务编排界面"
低空无人系统时代的「分布式控制与智能体系」
架构图
1️⃣ 产品总览
| 产品线 | 产品名称 | 核心定位 |
|---|---|---|
| 机载智能 | AIBrainBOX | 任务级智能控制与感知中枢 |
| 空地中枢 | AGH(Air-Ground Hub) | 空地协同与智能枢纽 |
| 地面控制交互 | Next-GCS | 多无人系统态势与任务编排 |
| 云端AI任务 | AI Mission Cloud | 模型 / 策略 / 数据闭环 |
| 记录审计 | FDR / Data Vault | 飞行事实与合规记录 |
端(AIBrainBOX)---边(AGH)---云(AI Mission Cloud)---人(GCS)
构成可扩展、可协同、可演进的低空无人系统操作体系
AIBrainBOX(机载侧)
AIBrainBOX 是部署在无人系统机载侧的任务级智能核心,
位于传统飞控之上,负责感知、决策、通信与协同控制。
AIBrainBOX = 机载侧的 FCC + MCC + DataLink + AI Mission Brain
AIBrainBOX 的三种形态
-
AIBrainBOX-C:通 + 算 + 控
-
AIBrainBOX-P:通 + 感 + 算 + 控
-
AIBrainBOX-N:通 + 感 + 算 + 控 + 卫惯

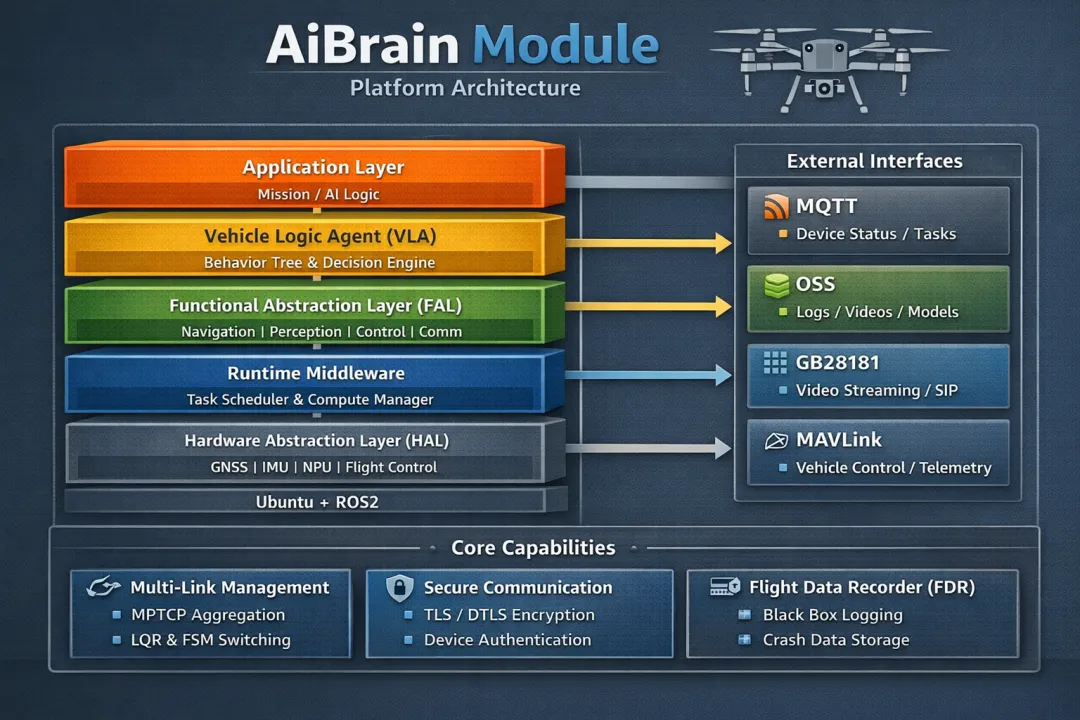
模块级架构
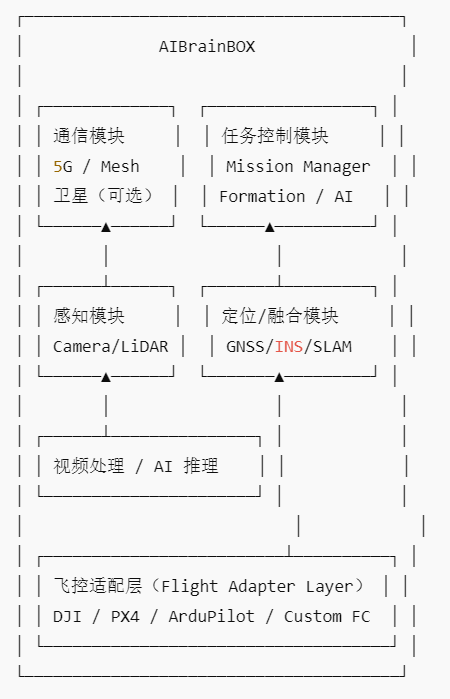
原厂飞控专注于硬实时控制与飞行安全,
AIBrainBOX 通过 Mission API 与其解耦协作。
AIBrainBOX = FCC 之上的"智能控制层(Mission + Perception + C2)
分层架构
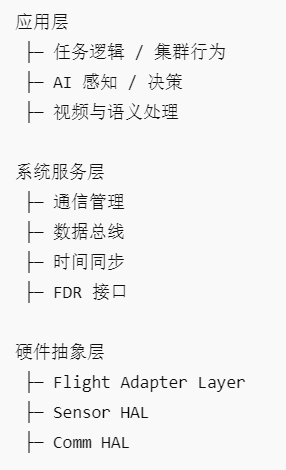
A.4 核心功能模块(功能级)
1️⃣ Flight Adapter Layer(必须)
-
DJI PSDK
-
MAVLink v2(PX4 / ArduPilot)
-
可扩展私有飞控
PRD 要求:
新增飞控 ≠ 改动上层逻辑
2️⃣ Mission Control Module
-
起降控制
-
航点 / 路径
-
编队 / 跟随
-
应急状态机
3️⃣ Perception & Fusion(P / N 型)
-
Camera / LiDAR 接入
-
GNSS / IMU / SLAM
-
GNSS 拒止 fallback
4️⃣ Communication Manager
-
5G
-
Mesh
-
卫星(预留)
-
链路质量评估与切换
5️⃣ Video & AI Pipeline
-
视频解码
-
AI 推理
-
结果结构化输出(非 raw)
6️⃣ Data & FDR Interface
-
事件驱动记录
-
只追加
-
时间戳统一
A.5 非功能需求(军用/行业必写)
-
启动时间 < X 秒
-
掉电保护
-
Watchdog
-
模块失效不影响飞控安全
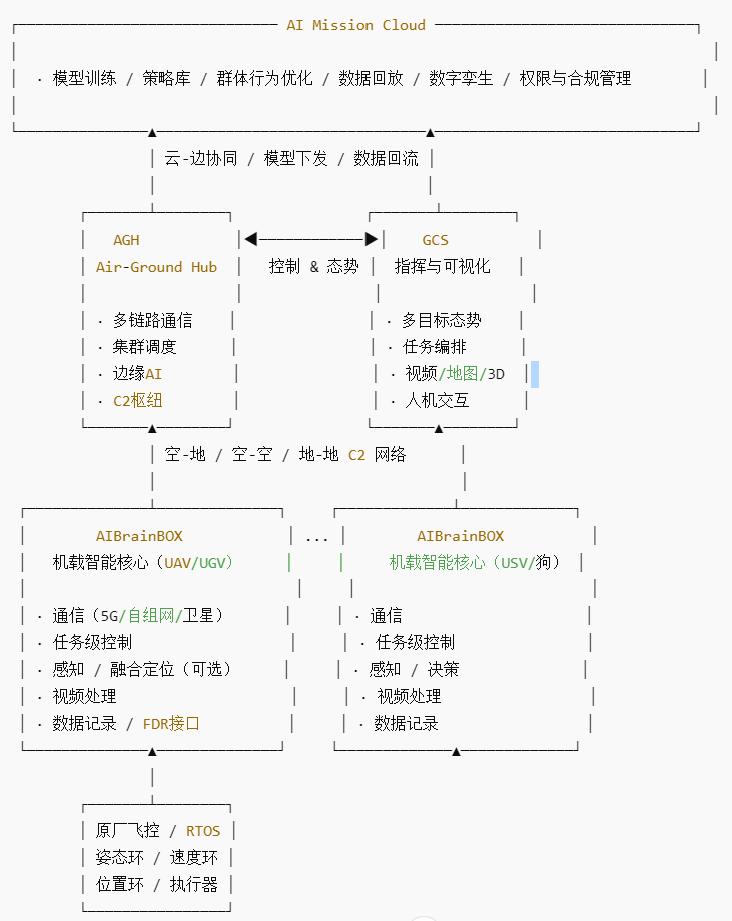
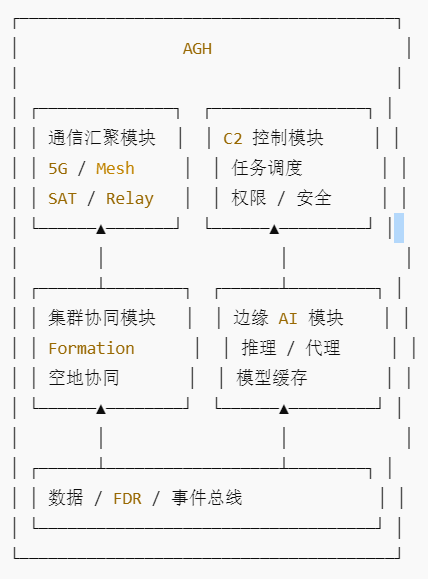
AGH(Air-Ground Hub)
AGH 是多无人系统的通信、控制与智能协同中枢,
是整个系统的"边缘大脑"。
AGH = 分布式无人系统的 C2 + Data + AI 枢纽
AGH = 多无人系统的空地协同与智能控制枢纽
-
通信枢纽
-
集群调度
-
边缘 AI
AGH 是一个"空---地---云---人"协同的分布式智能中枢,核心作用是:
统一通信、统一控制、统一智能决策,支撑多无人机、多执行体、多链路的协同运行。
AGH 的三大能力总览
| 能力层 | 本质角色 | 解决什么问题 |
|---|---|---|
| 通信中枢 | "网络与数据中枢" | 多链路、多设备、复杂环境下 连得上、不断、可控 |
| 控制中枢 | "任务与状态中枢" | 多无人系统 能统一调度、不打架、可接管 |
| 智能中枢 | "决策与认知中枢" | 从"遥控系统"升级为 半自主 / 协同智能系统 |
AGH 是无人系统的"空地协同智能中枢",通过通信中枢保障连接、通过控制中枢统一调度、通过智能中枢实现协同决策,使 AIBrainBOX 从"单机智能"升级为"系统级智能"。
三种部署形态
-
AGH-Cloud
-
AGH-Edge
-
AGH-Mixed
AGH 是"无人系统的边缘控制与智能节点",
可以没有人,但不能没有它。
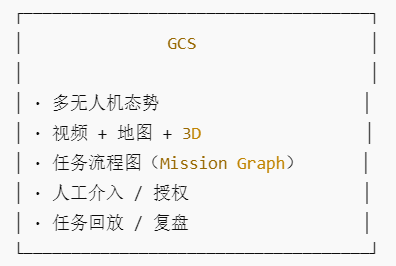
GCS-Next(下一代地面站)
GCS 是面向指挥员、调度员、行业用户的态势理解与任务编排系统,
而不是飞手遥控界面。
新一代 GCS =「人机态势界面」
它的变化点:
-
多载具(UAV / UGV / 狗)
-
多目标
-
多维数据(视频 + 3D + 轨迹)
-
非飞手导向,而是指挥员导向
-
多目标
-
多平台
-
人在"决策环",不是"操作环"
GCS 不做决策,只呈现与下发
AI Mission Cloud
AI Mission Cloud =
多模态 AI 推理的「控制平面 + 编排平面 + 模型注册中心」
-
端侧 AI 的"大脑协调者"
-
云端 AI 的"认知与任务规划层"
AI Mission Cloud 分层架构
架构分 4 层
① AI Runtime Layer(端侧)
-
YOLO / Depth / Tracking
-
CLIP Embedding(可选)
-
推理状态监控
② Semantic Abstraction Layer(端 → 云)
-
Detection Schema
-
Embedding Schema
-
Event Schema
③ Mission Reasoning Layer(云端)
-
CLIP / VLM
-
规则引擎
-
多模态关联推理
④ Task Orchestration Layer(云端)
-
任务 DSL
-
状态机 / 行为树
-
VLA(可选)
AI Mission Cloud 不是一个算法平台,而是一个多模态 AI 推理与任务编排的基础设施。它通过端侧实时感知(YOLO)与云端语义推理(CLIP / VLM),为无人系统提供可扩展、可组合、可合作的 AI 能力。
2️⃣ AIBrainBOX
AIBrainBOX = FCC + MCC + DataLink
-
FCC(Flight Control Computer) → 任务级
-
MCC(Mission Control Computer)
-
多链路 DataLink 汇聚节点
三种形态
🟦 AIBrainBOX-C(Control)通 + 算 + 控
-
位姿:来自本体飞控
-
控制:SDK / Mission Command
-
典型:DJI、行业多旋翼
🟦 AIBrainBOX-P(Perception)通 + 感 + 算 + 控
-
位姿:来自本体
-
传感器:LiDAR / 相机及雷视融合
-
能力:空间感知/认知,DAA / 3D 语义感知
-
面向:低空复杂环境-避障
🟦 AIBrainBOX-N(Navigation)通 + 感 + 算 + 控 + 导航
-
自带 GNSS + IMU
-
GNSS 拒止可运行(VINS、LIO、LVIO)
-
多模态融合定位(GNSS+LiDAR+Video+IMU)
-
面向:高价值场景
3️⃣ 飞控适配
飞控适配AIBrainBOX
Phase 1|厂商 SDK
-
DJI PSDK
-
道通PSDK
Phase 2|开源飞控
-
PX4
-
ArduPilot
-
MAVLink v2
👉 建议:
实现 Flight Abstraction Layer(FAL)
-
Takeoff / Land
-
Waypoint / Follow
-
Formation
-
Emergency
4️⃣ AGH ---空地通信、控制及智能中枢
AGH 是多无人系统的通信、控制与智能协同枢纽
AGH 的三大中枢能力
① 通信中枢
-
5G
-
宽带自组网
-
卫星
-
异构链路融合
② 控制中枢(任务级)
-
集群调度
-
空地协同
-
权限管理
-
C2 转发
③ 智能中枢
-
边缘推理
-
大模型代理
-
云-边协同
5️⃣ 新一代 GCS-Next
GCS 是"态势理解 + 任务编排 + 决策支持系统"
5.1 核心能力
-
多 UAV / UGV / USV
-
视频 + BEV + 地图
-
多目标态势
-
任务流程图(Mission Graph)
-
AI 建议(而非自动)
5.2 GCS 与 AGH 的关系
AGH 是大脑,GCS 是眼睛和手
6️⃣ 数据 / FDR / 合规体系
6.1 FDR 的准确定位
FDR ≠ 存储
FDR = 飞行事实记录器
6.2 数据来源
-
飞控
-
AIBrainBOX
-
AGH
-
GCS 操作事件
6.3 为什么必须要 FDR
-
事故复盘
-
责任界定
-
商业保险
通过 AIBrainBOX 将传统无人机升级为具备智能感知、
多链路通信与协同能力的智能节点;
通过 AGH 实现多无人系统的空地协同与智能调度;
通过新一代 GCS 为人提供全局态势与决策支持;
最终构建可在 GNSS 受限环境下运行的低空无人系统基础设施。
面向无人系统的 VLAM(Vision-Language-Action-Model):通过多模态感知与语义理解,实现无人平台在 GNSS 拒止与复杂环境下的自主决策与执行
VLAM 运转逻辑
云端理解"要做什么",
端侧判断"现在发生了什么",
VLA 决定"下一步做什么",
FAL 负责"怎么做",
飞控负责"把动作变成物理世界"。
VLAM 不是新的 AI 模型,而是一种让多模态感知、语义理解和物理执行形成闭环的无人系统架构。
AIBrainBOX + AGH + AI Mission Cloud 已经构成了完整的 VLAM
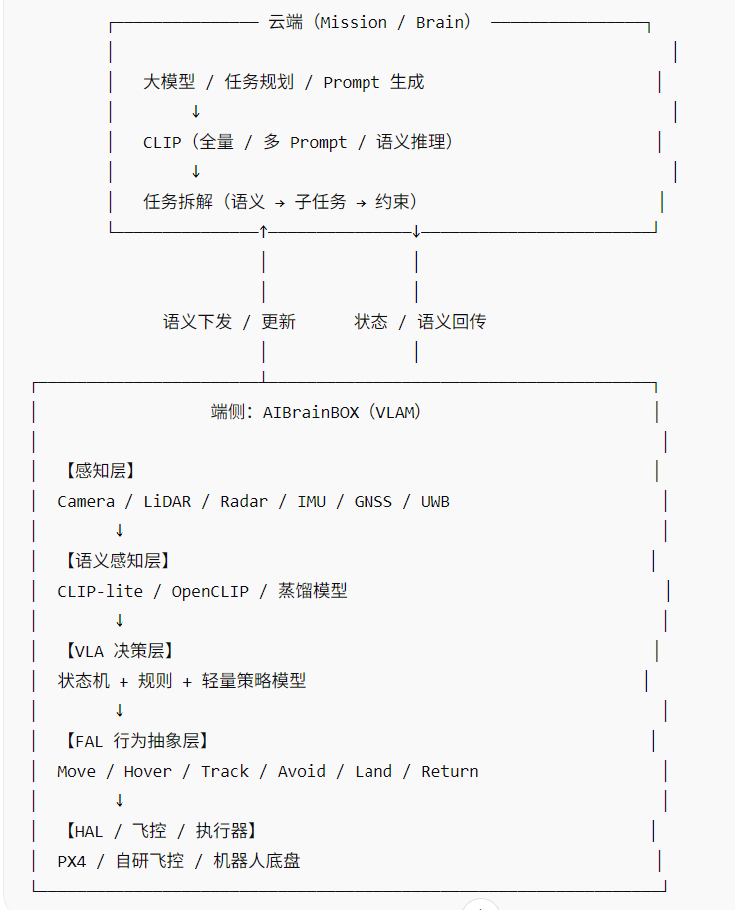
| VLAM 模块 | 对应系统 |
|---|---|
| 感知层 | AIBrainBOX |
| 语义感知层 | CLIP(端 + 云) |
| VLA 决策层 | AIBrainBOX + AGH |
| 行为抽象(FAL) | AIBrainBOX |
| 任务理解 / 规划 | AI Mission Cloud |
| 协同 / 多体 | AGH |
地下管廊无人机巡检(GNSS 拒止)
任务描述(自然语言):
"进入 3 号管廊,巡检电缆支架,如发现异常发热或结构异常,悬停并上报。"
Step 0|任务进入系统(云端)
AI Mission Cloud
-
接收自然语言任务
-
LLM解析为:
-
区域:3 号管廊
-
目标:电缆支架
-
异常:发热 / 结构异常
-
行为:悬停 + 上报
-
👉 这里用的是云侧 LLM/CLIP,但不下动作
Step 1|任务语义下发(AGH)
AGH 将任务拆成:
-
子任务 1:进入区域
-
子任务 2:巡检目标
-
子任务 3:异常处理
并以 语义 + 约束 形式下发到 AIBrainBOX。
Step 2|端侧感知启动(AIBrainBOX)
感知层
-
LiDAR → 空间结构
-
Camera → 视觉
-
IMU / VIO → 定位
物理目标识别
- YOLO:识别 "电缆 / 支架 / 异物"
Step 3|语义确认(CLIP 端侧)
CLIP-lite 执行:
-
"当前看到的是否符合'电缆支架'?"
-
"是否符合'异常'语义?"
👉 这一步是 VLAM 的语义闭环起点
Step 4|VLA 决策层介入(核心)
VLA 决策层判断:
-
当前状态:巡检中
-
语义事件:发现异常
-
风险:低
-
任务约束:需要悬停
👉 输出决策:
调用 FAL:Hover + TrackTarget
Step 5|FAL → 飞控执行
-
FAL:Hover(position, heading)
-
HAL / 飞控:姿态控制
-
云台:对准目标
Step 6|状态回传与任务更新
-
图像 + 语义标签回传
-
AGH 更新任务状态
-
Mission Cloud 决定:
-
继续巡检
-
或返航
-
或等待指令
-
Step 7|任务完成 / 异常恢复
若通信中断:
-
AIBrainBOX 继续本地策略
-
保证安全与可解释性
VLAM 构成
| VLAM 模块 | 本质 | 是否已有 | 对应系统 |
|---|---|---|---|
| 多模态感知 | 看世界 | ✅ | AIBrainBOX |
| 物理目标感知 | 看"物体" | ✅ | YOLO(端) |
| 语义感知 | 看"意义" | ✅ | CLIP(端 / 云) |
| 任务理解 | 知道要干嘛 | ✅ | LLM |
| 决策闭环(VLA) | 决定下一步 | ⚠️ | AIBrainBOX + AGH |
| 行为抽象(FAL) | 把决策变成动作 | ⚠️ | AIBrainBOX |
| 执行接口 | 控制物理世界 | ✅ | 飞控 / HAL |
场景一|低空行业巡检(UAV + AGH)
应用对象
-
电力
-
管廊
-
港口
-
油气
架构特点
-
单 AGH + 多 AIBrainBOX-UAV
-
GNSS 为主,感知辅助
-
视频与 3D 语义为核心
场景二|GNSS 拒止环境(地下 / 城市峡谷)
应用对象
-
地铁
-
地下管廊
-
隧道
-
军事设施
架构特点
-
AIBrainBOX-N
-
多模态融合定位
-
AGH 做中继与协同
场景三|空地协同 / 集群(UAV + UGV + 狗)
应用对象
-
军用
-
应急
-
大型安防
架构特点
-
多平台统一 Mission
-
AGH 为调度核心
-
GCS 为态势中枢