本文介绍一种基于RSSI信号的三维空间多锚点定位仿真程序,结合容积卡尔曼滤波(CKF)对动态目标轨迹进行降噪优化,并提供完整可运行的MATLAB代码,适合用于室内定位、无线传感网络及导航滤波领域的学习与研究参考。
文章目录
课题介绍
本程序实现三维空间中基于RSSI(接收信号强度指示)的多锚点目标定位,并采用容积卡尔曼滤波(CKF)对动态运动轨迹进行平滑优化。程序默认配置10个锚节点,通过对数路径损耗模型模拟真实的无线信号衰减特性,在原始定位结果基础上引入CKF对噪声进行有效抑制,显著提升轨迹估计精度。
核心模块包括:
- RSSI信号建模 :基于
RSSI(d) = RSSI_0 - 10n·log10(d) + ε的对数衰减模型,模拟带高斯噪声的测量值 - 三边/多边定位解算:通过伪逆矩阵求解超定线性方程组,实现最小二乘意义下的最优三维位置估计
- CKF轨迹滤波:采用2L个容积点近似非线性系统统计特性,通过时间更新与量测更新迭代实现动态误差抑制
- 多维误差分析:输出三轴绝对误差、终点距离误差及全程RMSE等量化评估指标
运行结果
程序运行后输出以下结果:
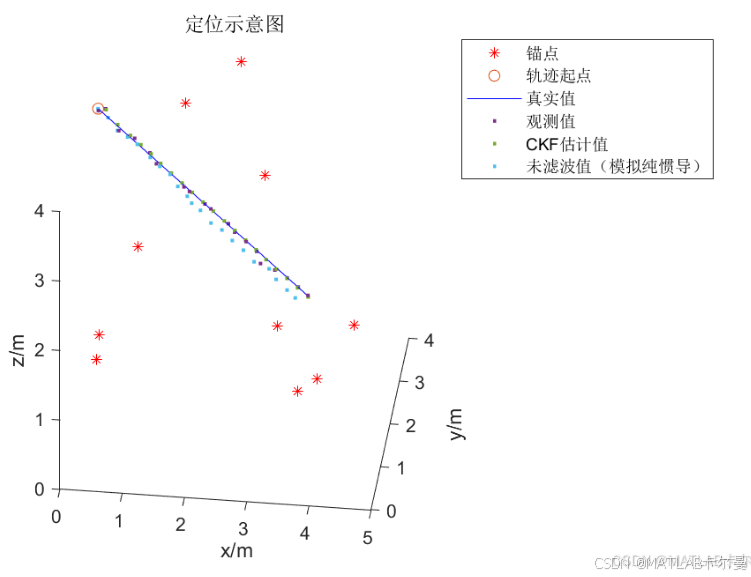
三维定位轨迹图 :对比展示锚点分布、目标真实轨迹、原始RSSI观测值、CKF滤波估计值与纯惯导模拟值的空间路径,直观反映滤波效果。
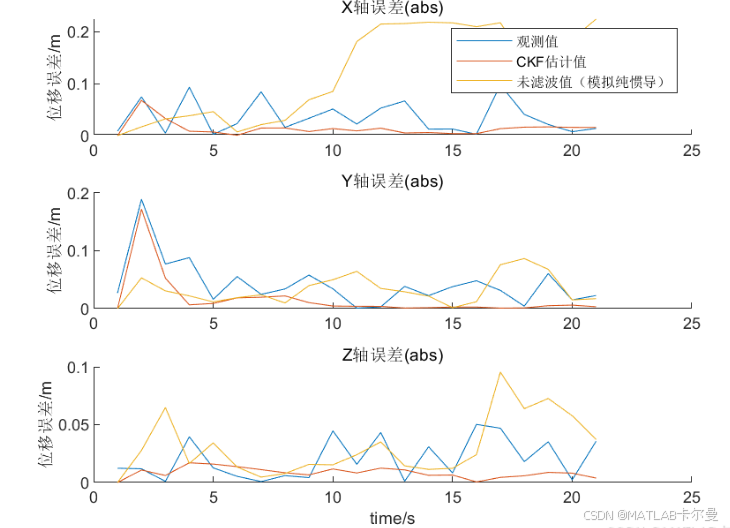
三轴误差曲线图:分别绘制X、Y、Z三轴的绝对定位误差随时间的变化,CKF滤波后误差明显低于未滤波的纯观测值。
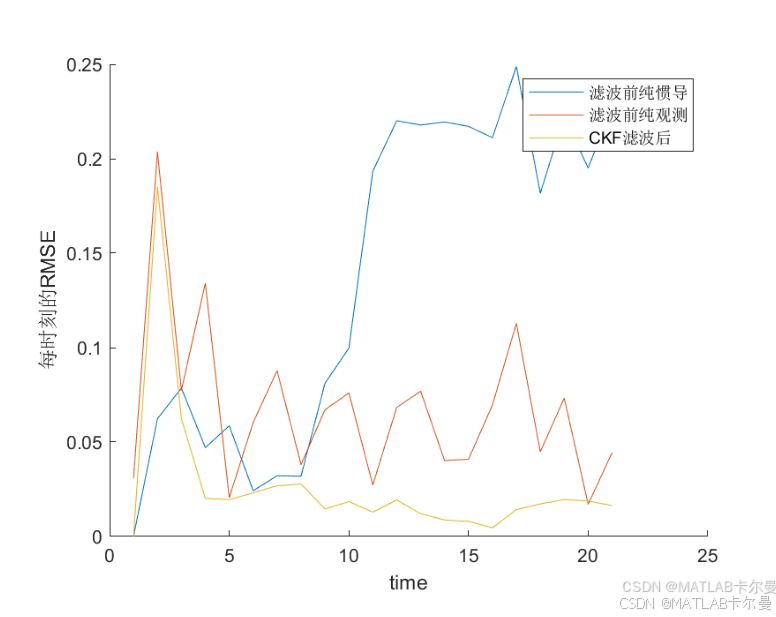
RMSE对比图 :对比三种方案(纯惯导、纯RSSI观测、CKF融合)的每时刻RMSE,验证CKF在提升定位精度方面的有效性。
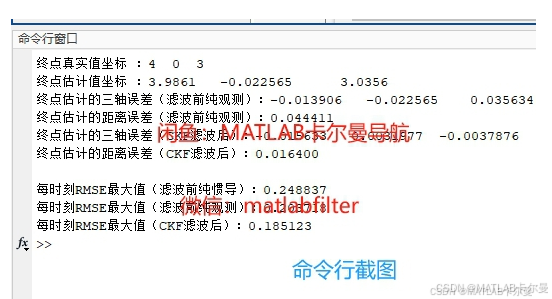
命令行数值输出 :打印终点三轴误差、终点距离误差以及各方案的RMSE最大值,便于定量比较性能。
部分代码:
matlab
RSSI定位程序,N个锚点、三维空间,使用CKF对轨迹进行滤波
% 2025-03-29/Ver1
clear; clc; close all; % 清除工作区、命令窗口和关闭所有图形窗口
rng(0)
%% 模型初始化
RSSI_err = 0.1; % 定义RSSI测量误差
n = 10; %定义锚节点数量
% 定义锚节点位置 (x, y)
baseP = 2*[sin(1:n)+0.01*[1:n]+1;cos(4*(1:n))+0.01*[1:n]+1;cos(2*(1:n))+0.01*[1:n]+1]';
% 使用正弦和余弦函数生成锚节点坐标,并添加微小随机偏移
% 定义信号强度与距离的关系
% 假设信号强度衰减模型为: RSSI(d) = RSSI_0 - 10*n*log10(d)
RSSI_0 = -30; % 在1米处的信号强度
n = 2; % 衰减因子
% 模拟未知点的位置
------------------------------------------------
版权声明:本文为CSDN博主「MATLAB卡尔曼」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/callmeup/article/details/146712531完整代码和讲解:https://blog.csdn.net/callmeup/article/details/146712531
发展方向
本程序可在以下方向进一步扩展与优化:
- 融合多源传感器:将RSSI定位与IMU惯性导航数据融合,构建更鲁棒的紧组合或松组合定位系统
- 非线性运动模型:将当前匀速运动模型替换为常速转弯(CT)或自适应运动模型,适应更复杂的目标机动场景
- 滤波器对比研究:引入扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)与CKF进行横向性能对比
- 环境适应性增强:引入信道遮挡建模、多径效应等更贴近实际的信号传播模型
- 实验数据验证:将仿真框架迁移至真实硬件采集数据,评估算法在真实场景中的适用性
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者