目录
[课程学习配置类 curriculum](#课程学习配置类 curriculum)
零.前置说明
本贴完成了从如何创建一个新的IsaacSim仿真项目,到完成基本的项目配置(MDP配置、机器人模型配置、Gym接口注册),再到训练、验证及可视化,最后完成策略优化的闭环流程。
为初学者提供了第一篇零基础具身智能入门贴。
帖子所涉及的整个Demo已上传至Github:menoking/Go2-Demo: The first demo project based on Unitree Go2 when author learn Embodied Intelligence.
本贴参考了猫师傅的教程:【Lesson2上】米雪儿教你从零开始编写Isaaclab强化学习环境_哔哩哔哩_bilibili
一.基础知识
基础扫盲
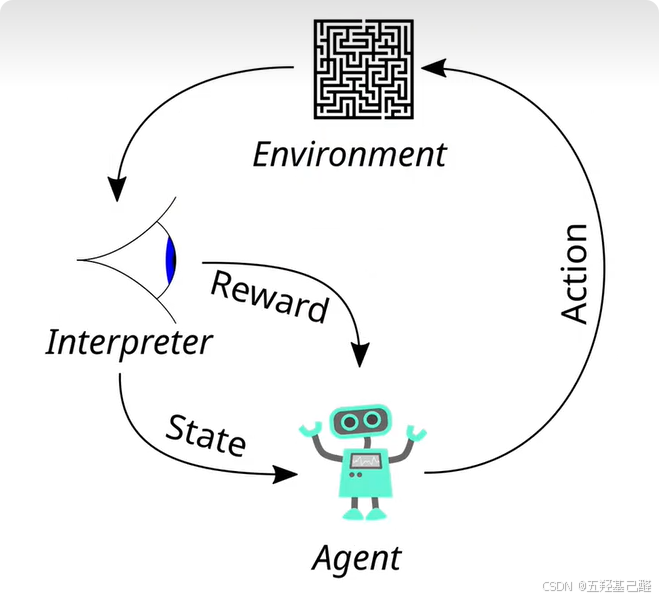
强化学习RL:通过让智能体(Agent)与环境(Environment)交互,学习出能够最大化累积奖励(Cumulative Reward)的策略(Policy)。
- 智能体Agent
- 奖励Award
- 环境Environment
- 策略Policy
领域术语
机器人领域的一些文件格式:
USD:皮克斯开发的通用场景描述框架,以分层、非破坏式编辑为核心,是 Isaac Sim 的原生格式,支持复杂材质、动画和大规模场景合成。
URDF:基于 XML 的机器人描述格式,定义连杆、关节、运动学和动力学属性,是 ROS 生态中机器人的标准表示。
SDF:Gazebo 专用的仿真描述格式,能完整描述整个世界(多机器人、地形、传感器、灯光等),比 URDF 更强大。
MJCF:MuJoCo 物理引擎的原生 XML 格式,描述紧凑、接触建模高效,广泛用于高频控制和足式机器人仿真。
XACRO:URDF 的宏语言扩展,支持参数化、模块化生成 URDF 文件,用于避免重复代码。
STL / OBJ / COLLADA (DAE):仅用于存储 3D 网格几何数据的静态格式,不包含运动学或动力学信息,常被 URDF/USD 作为视觉或碰撞网格引用。
GLTF / GLB:面向实时渲染和 Web 传输的 3D 格式,集成了网格、材质、动画和皮肤,在图形交换中越来越普及。
MDP:马尔可夫决策过程(Markov Decision Process) 。它是强化学习问题形式化的数学基础,也是 Isaac Lab 中每个环境(
Env)核心逻辑的设计依据。
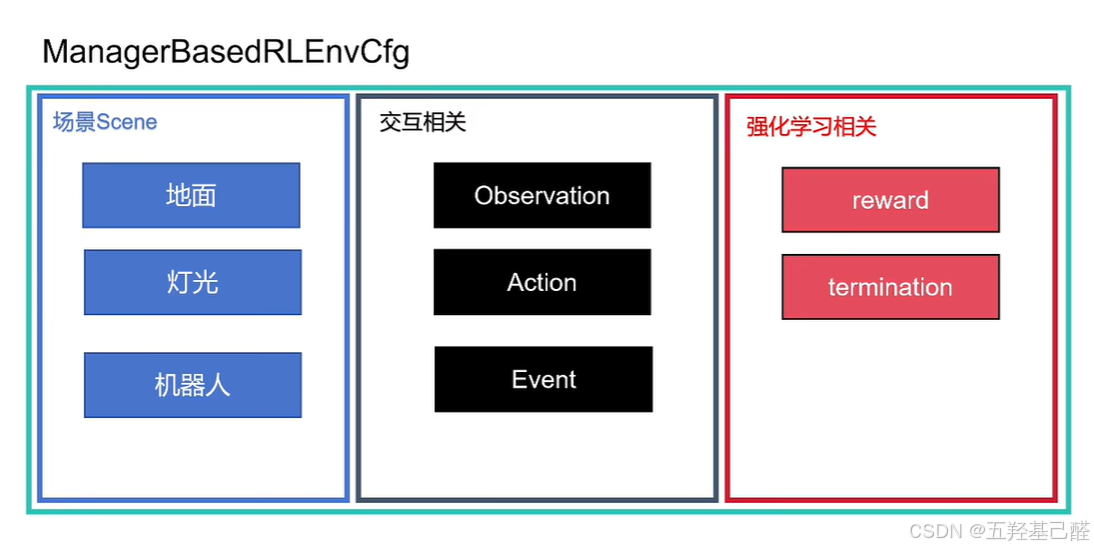
在 Manager-based 中,MDP 的各部分被拆解为独立的配置模块:
Observation Manager:定义如何从物理状态映射到观测。
Action Manager:定义动作空间及映射到实际控制量。
Reward Manager:累加多个奖励项。
Termination Manager:判断任务失败/成功条件。
在 Direct 工作流中
- 直接覆写
_get_observations(),_get_rewards(),_get_done_terminations()等方法。
二.项目创建与配置
创建项目
键入以下命令
bash
isaaclab.bat -n新建项目,进入配置页面:
!这里注意上下箭头移动,空格选中,回车确认!
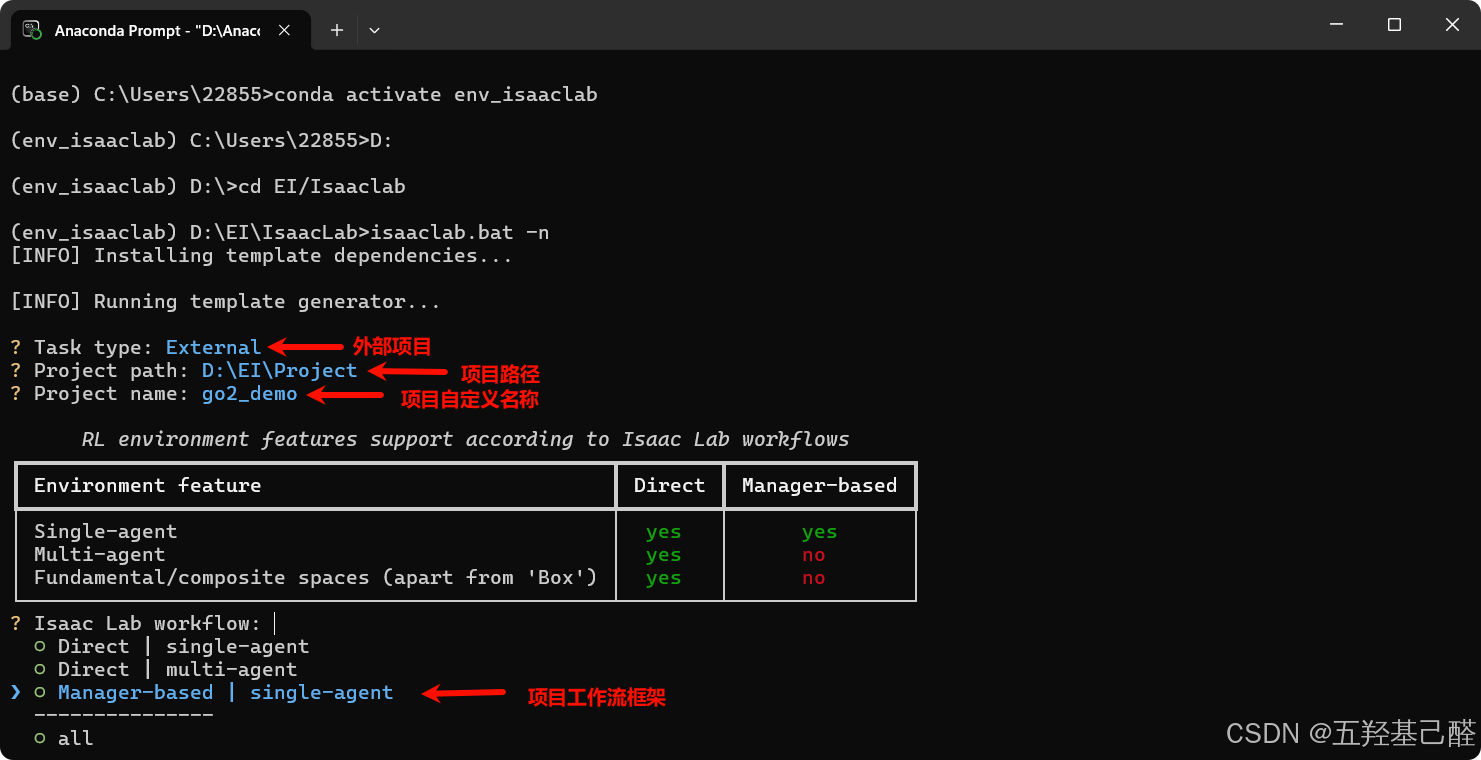
工作流框
- Manager-based:声明式框架,官方推荐主流框架,模块化结构化,适合复杂任务、快速原型开发和团队协作。
- Direct :命令式框架,直接灵活自由度高,个性化,适合简单精细任务。
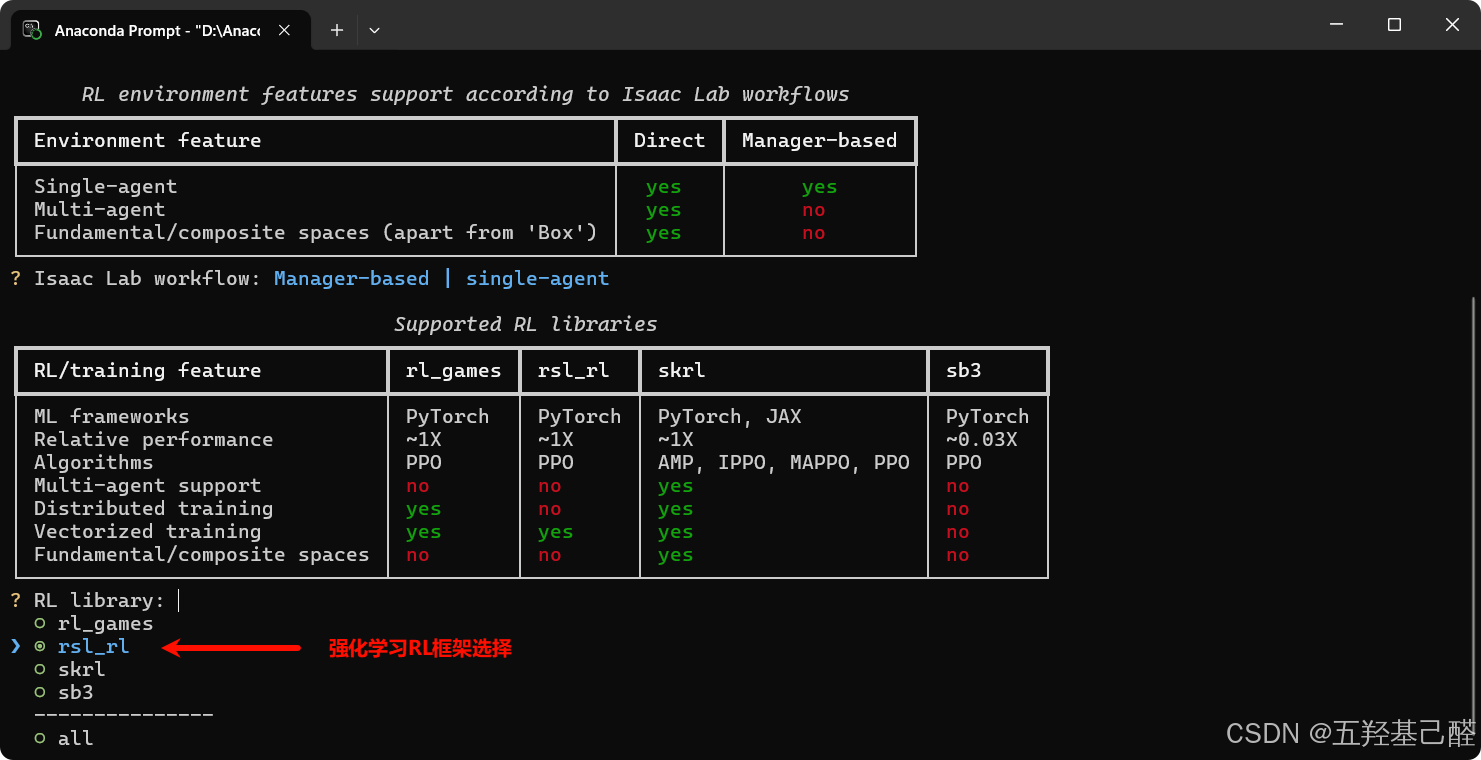
强化学习RL框架
rsl-rl :简单、专注且高效。追求在机器人(尤其是足式机器人)任务中快速验证并取得好结果的首选方案。它由ETH Zurich研发,核心理念是"提供紧凑且易于修改的代码库"。
SKRL (Skrl):灵活多样的"瑞士军刀"。提供PPO、SAC等丰富算法库,适合快速横向对比研究。
RL Games:工业级"性能猛兽"。训练效率和稳定性极佳,适合超长时间大规模训练任务。
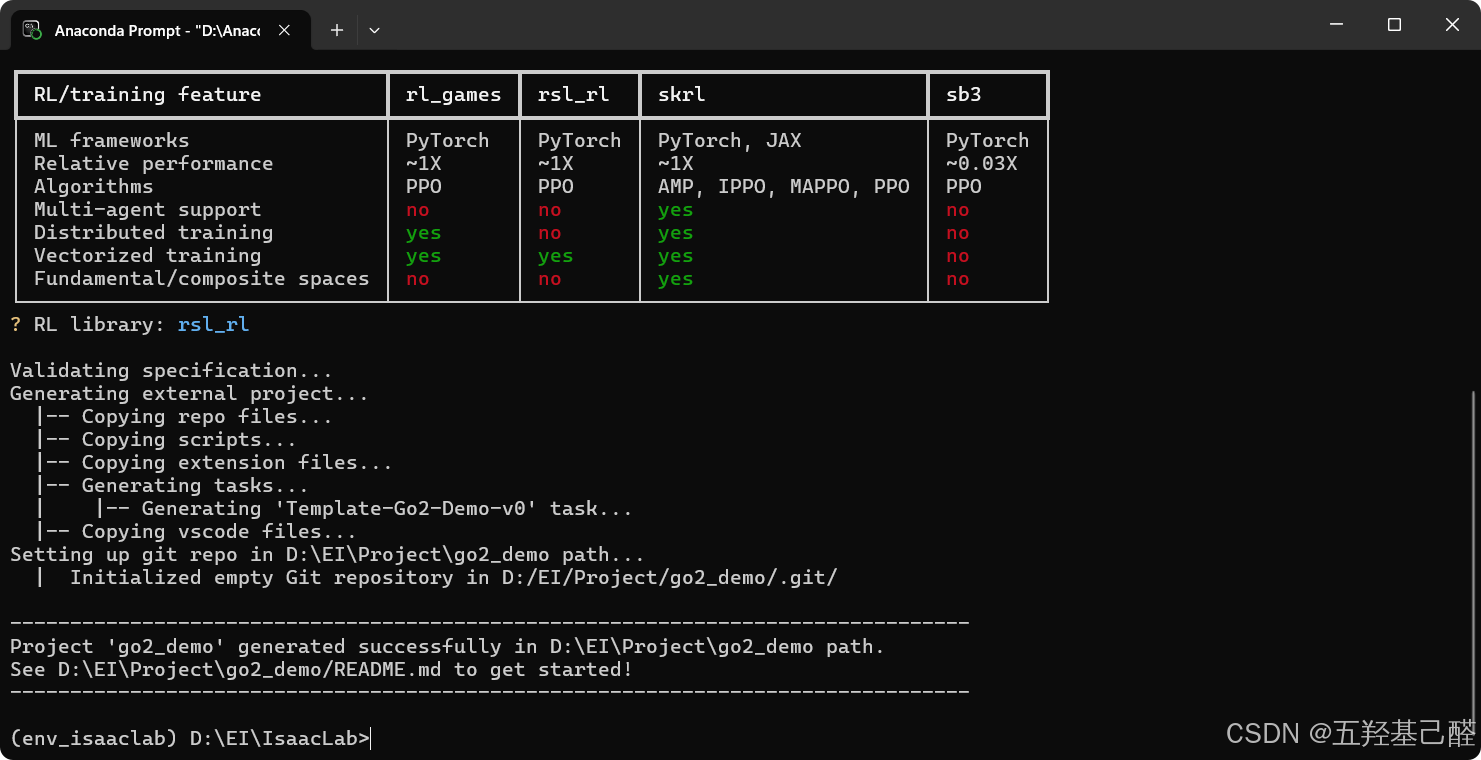
创建成功如图:
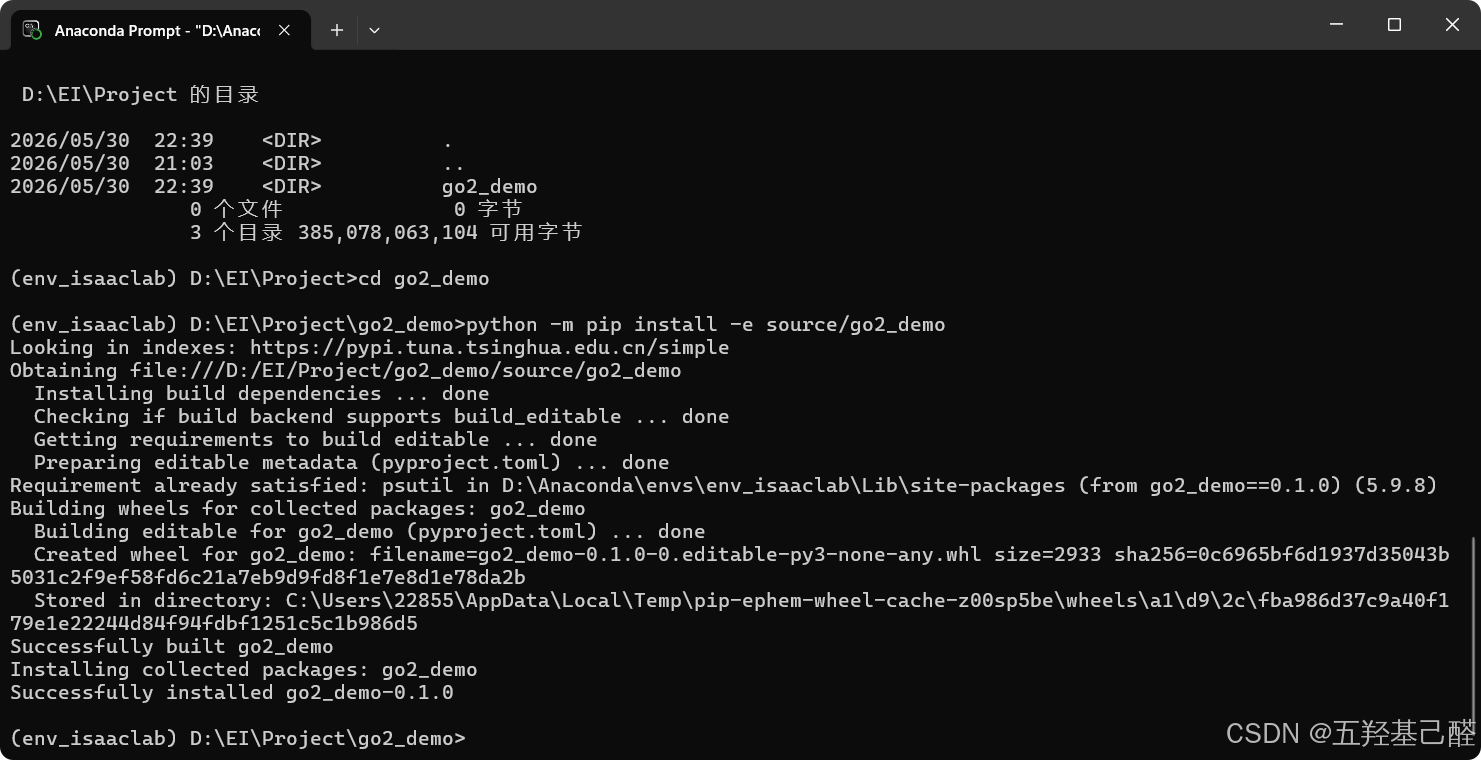
运行以下命令,注意后面的<given-project-name>替换成自己的项目名称:
bash
python -m pip install -e source/<given-project-name>这条命令的作用:
安装基础环境:它确保你的Python环境能够识别和导入Isaac Lab的核心功能。
注册自定义扩展 :以"可编辑"模式安装了你指定的项目扩展(例如
source/your_extension)。这样一来,你对项目代码的任何修改都能立即生效,无需重新安装,非常便于开发。
如下图,新建任务成功:
用VS Code打开项目后可观察到项目目录:
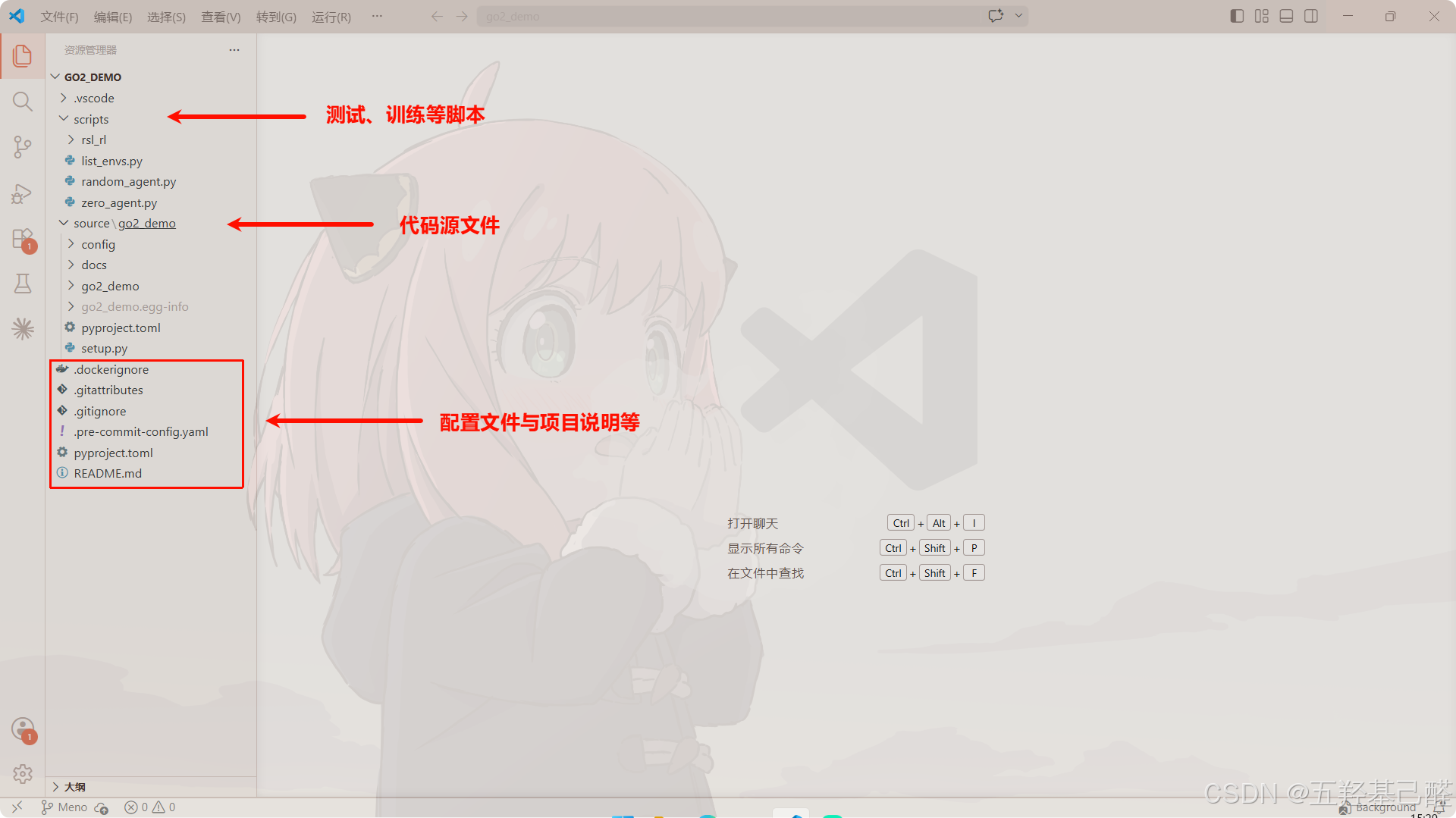
本项目所用到的Manager-based架构
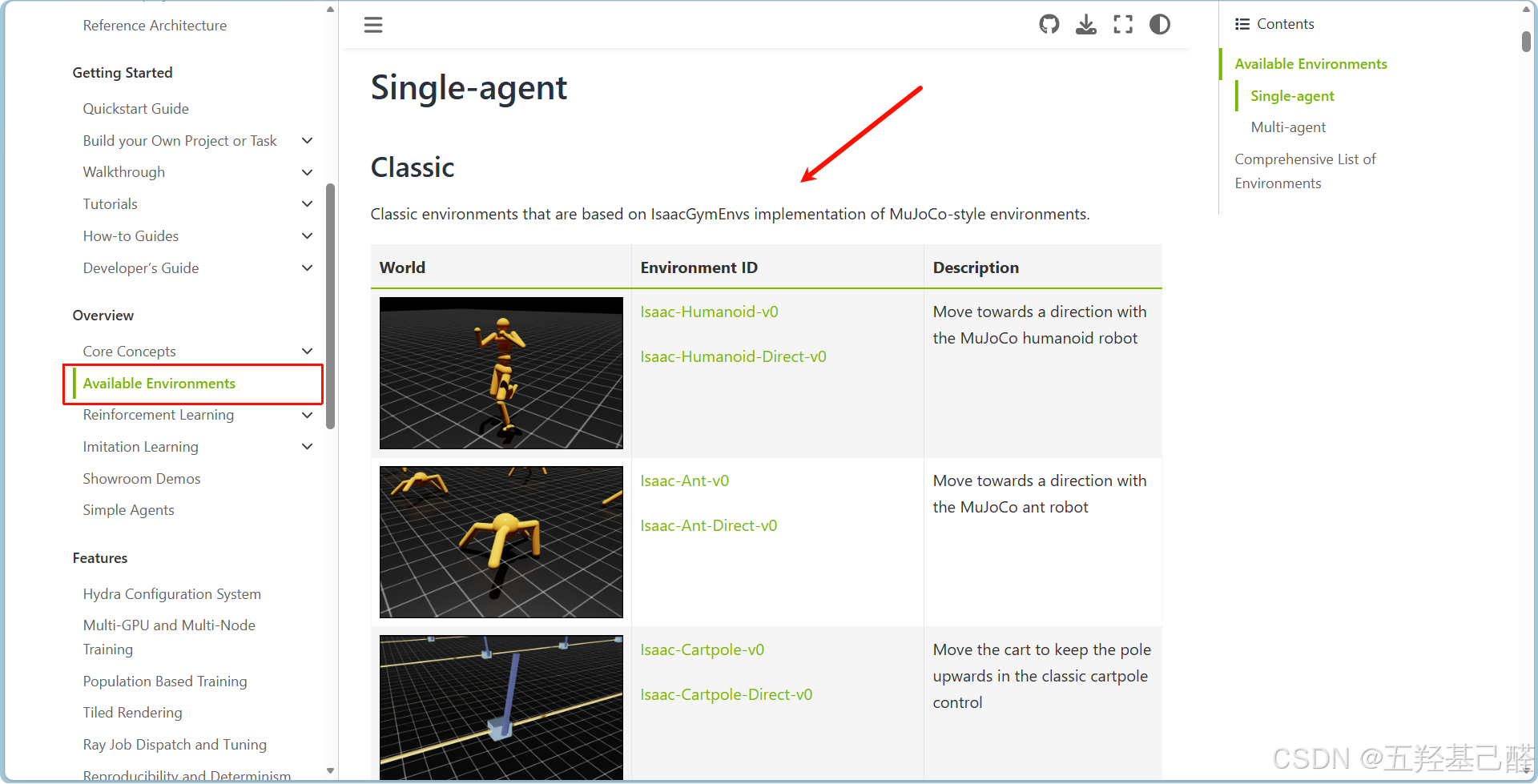
官方模板一般来说使用官方模板进行修改以完成自己的任务。
访问官方模板:Available Environments --- Isaac Lab Documentation
手动搭建
官方示例与仓库
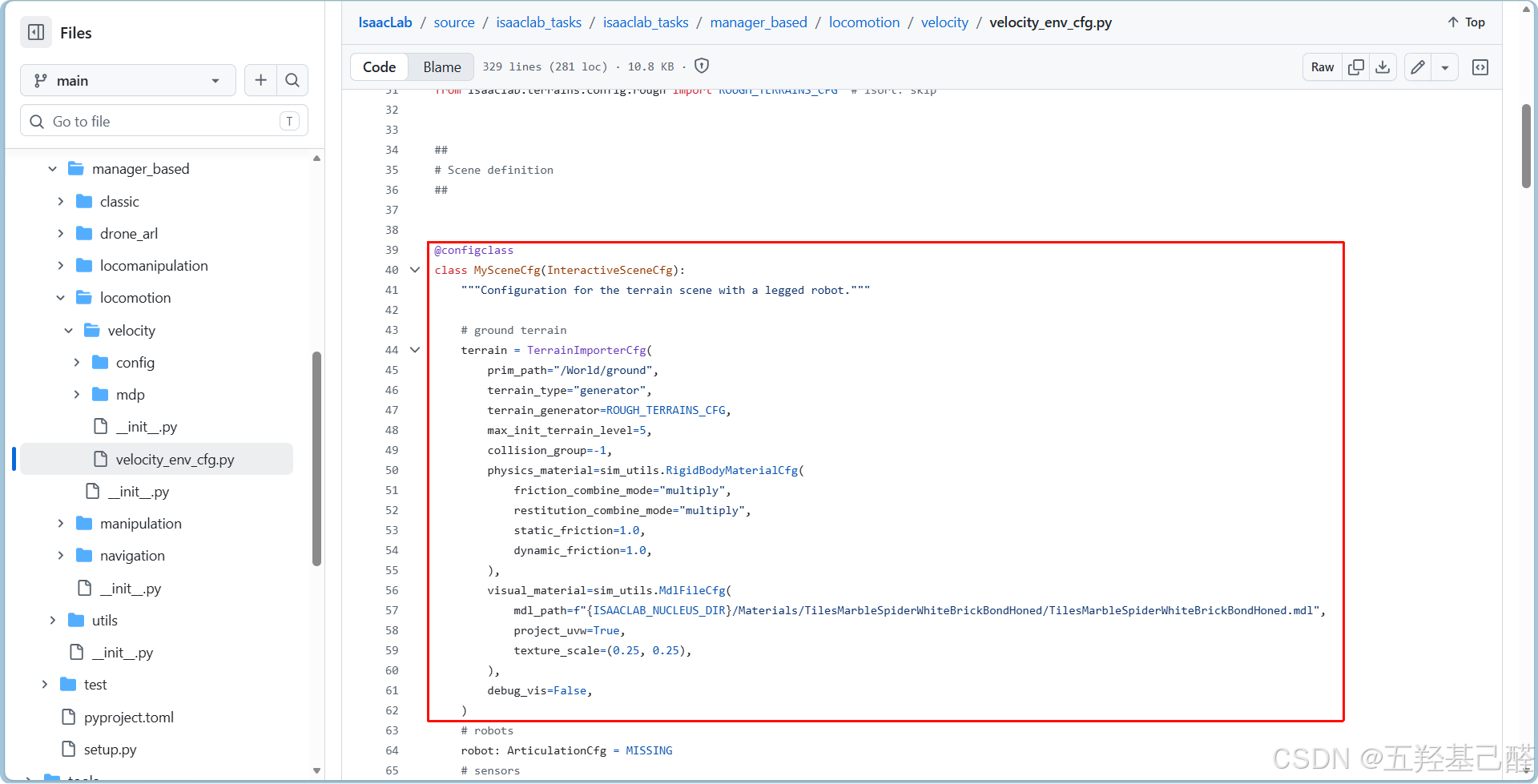
以下两个官方源可提前打开,其中使用的机器人文件来源是unitreerobotics/unitree_rl_lab项目,官方模板参考的是IsaacLab中的velocity_env_cfg.py文件,后续配置会用到。
IsaacLab官方示例
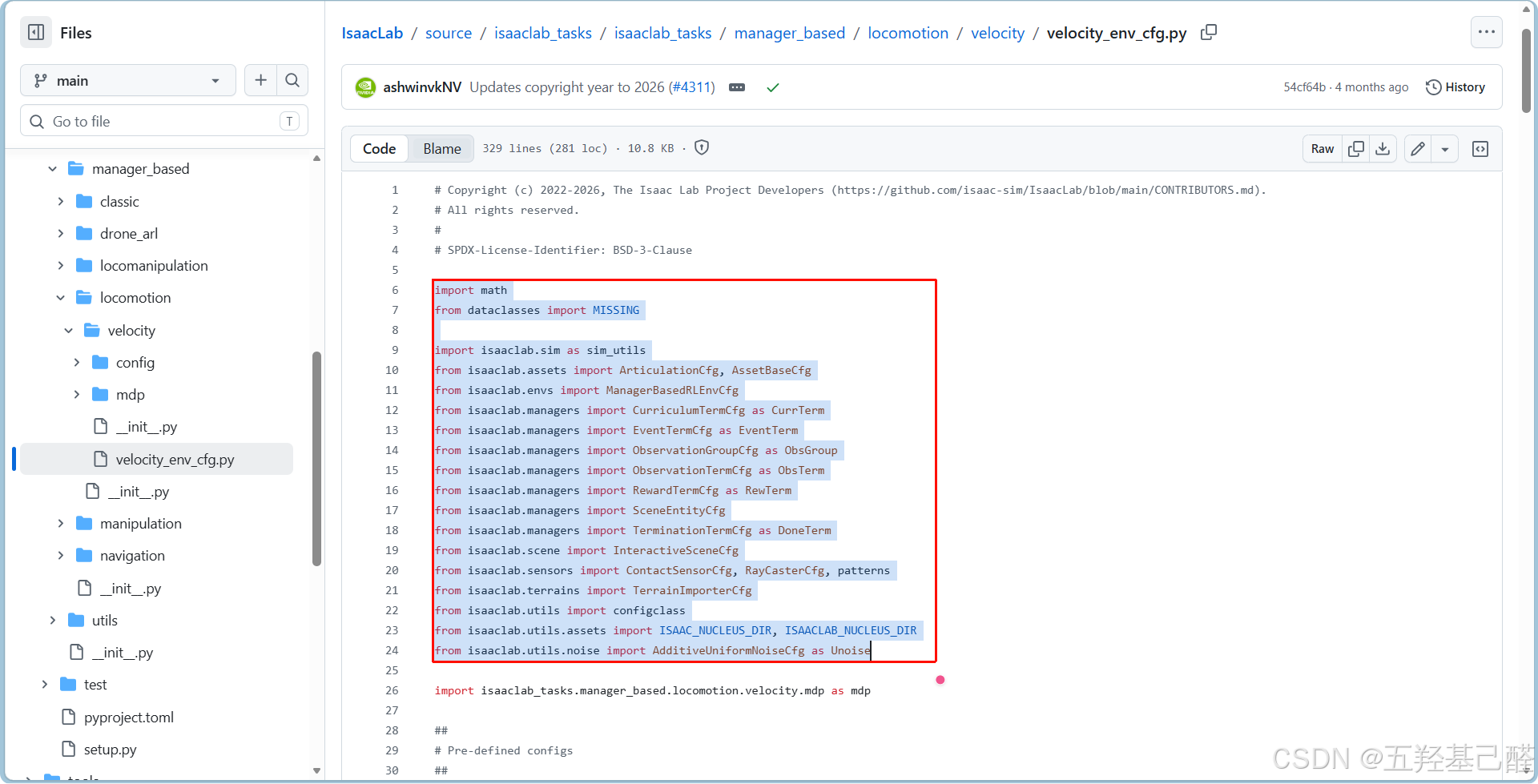
接下来我们下列代码(一个基于管理器工作流Manager-based的四足机器人速度追踪训练环境的完整配置文件,定义了宇树 Go2 机器人在复杂地形上学习奔跑的强化学习任务)作示例进行改写:
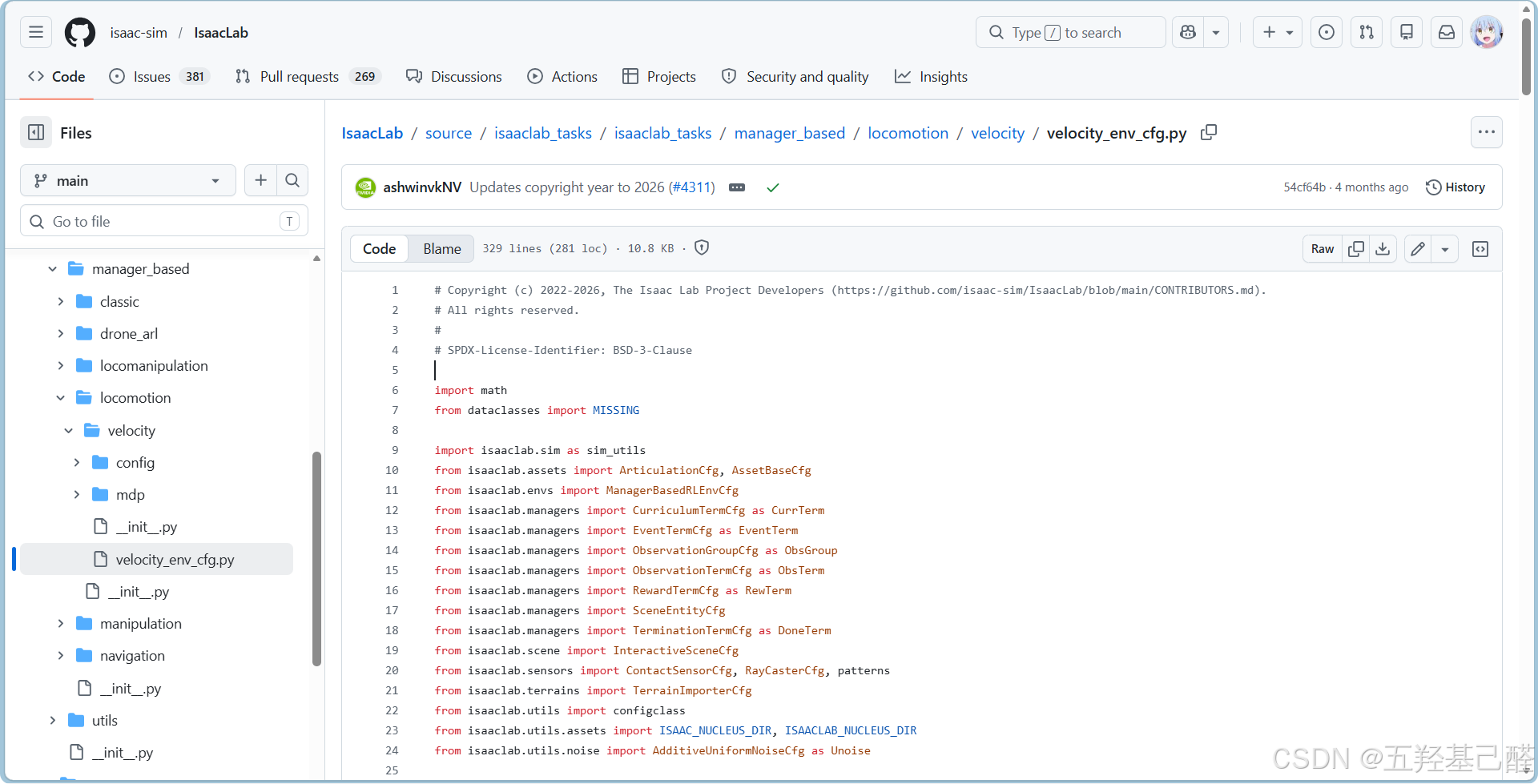
上述示例代码的
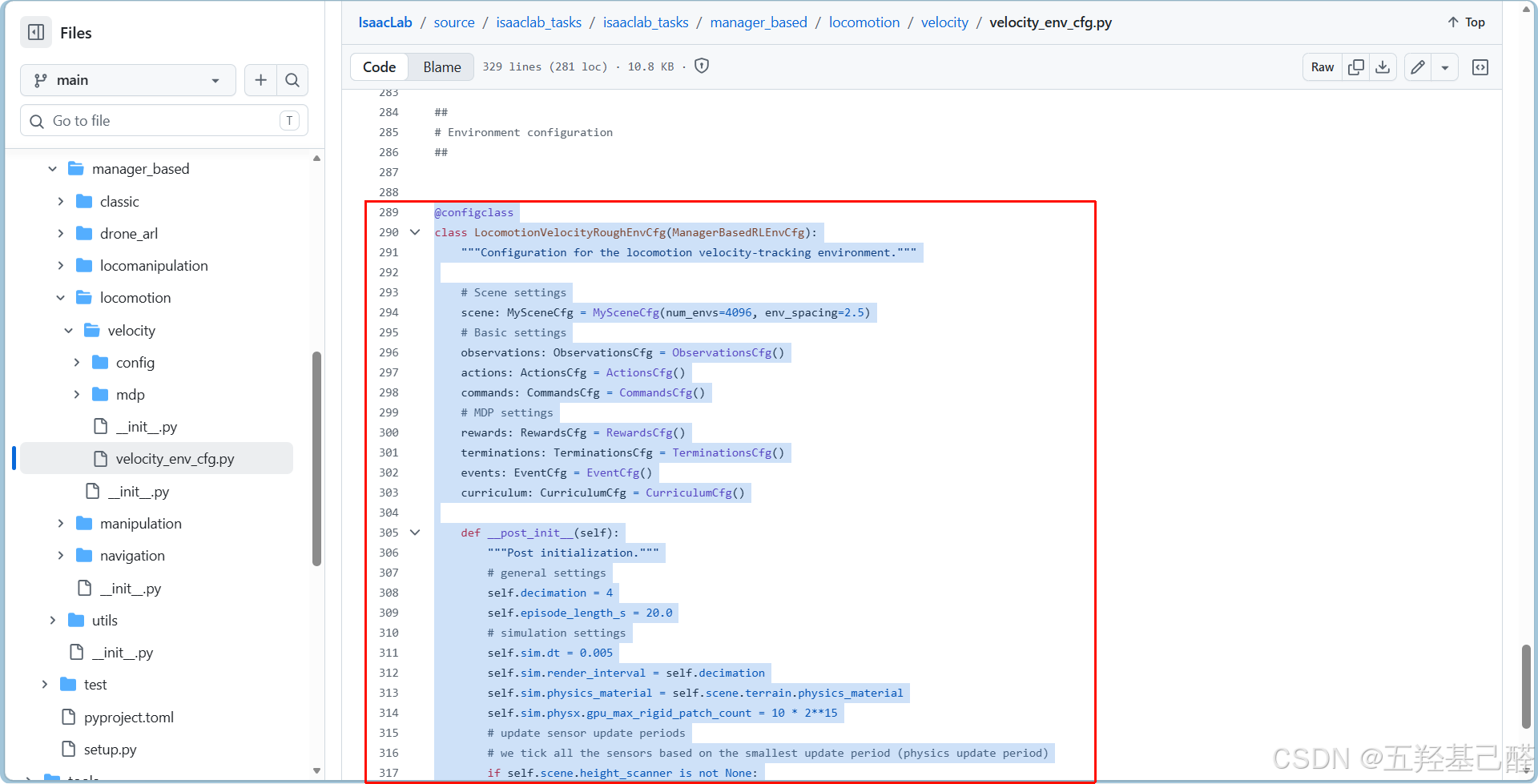
代码块 对应 MDP 要素 具体内容与作用 MySceneCfg场景与环境 包含带纹理的粗糙地形 ( ROUGH_TERRAINS_CFG)、Go2 机器人(引用外部定义)、射线高度扫描传感器 (感知地形)、接触传感器(检测脚掌/大腿触地)以及天空光照。CommandsCfg高层指令(任务目标) 生成随机线速度命令 (vx, vy)和 朝向角速度命令 (ang_vel_z),机器人需要追踪这个动态变化的指令。这就是"速度追踪任务"的核心。ActionsCfg动作空间 输出目标关节位置 ( JointPositionActionCfg),范围缩放 0.5,使用默认偏移量(即机器人站立时的关节角度)。ObservationsCfg观测状态 (S) 定义策略网络 ( PolicyCfg) 的输入数据,共7项:机体线速度/角速度、投影重力、速度命令、关节相对位置/速度、上一次动作、地形高度扫描。并对每项添加了均匀噪声(模拟传感器噪声)。EventCfg域随机化与初始化 分为三类: startup (启动时一次):随机化物理材质、增加机身质量、改变质心位置。 reset (每个 episode 重置时):随机重置机器人根部位姿、关节位置/速度。 interval(训练中周期触发):以随机时间间隔用力推机器人(提高抗干扰能力)。 RewardsCfg奖励函数 (R) 由正向奖励 (速度追踪误差的指数奖励,线速度权重1.0,角速度权重0.5)和多项惩罚 组成: 惩罚竖向线速度、横向/俯仰角速度、关节力矩/加速度、动作变化率; 奖励脚掌离地时间(鼓励奔跑步态); 惩罚大腿非预期接触地面。 TerminationsCfg终止条件 超时 ( time_out,步数达到episode_length_s / dt)和机身触地 (base_contact,检测到机身接触即认为失败)。CurriculumCfg课程学习 根据机器人追踪速度的表现,自动提升地形难度等级( terrain_levels_vel)。LocomotionVelocityRoughEnvCfg总配置类 将上述所有模块组合,并设置仿真参数 : decimation=4(动作每4个仿真步执行一次,即控制频率50Hz,仿真频率200Hz);episode_length_s=20.0(每个 episode 最长20秒)。
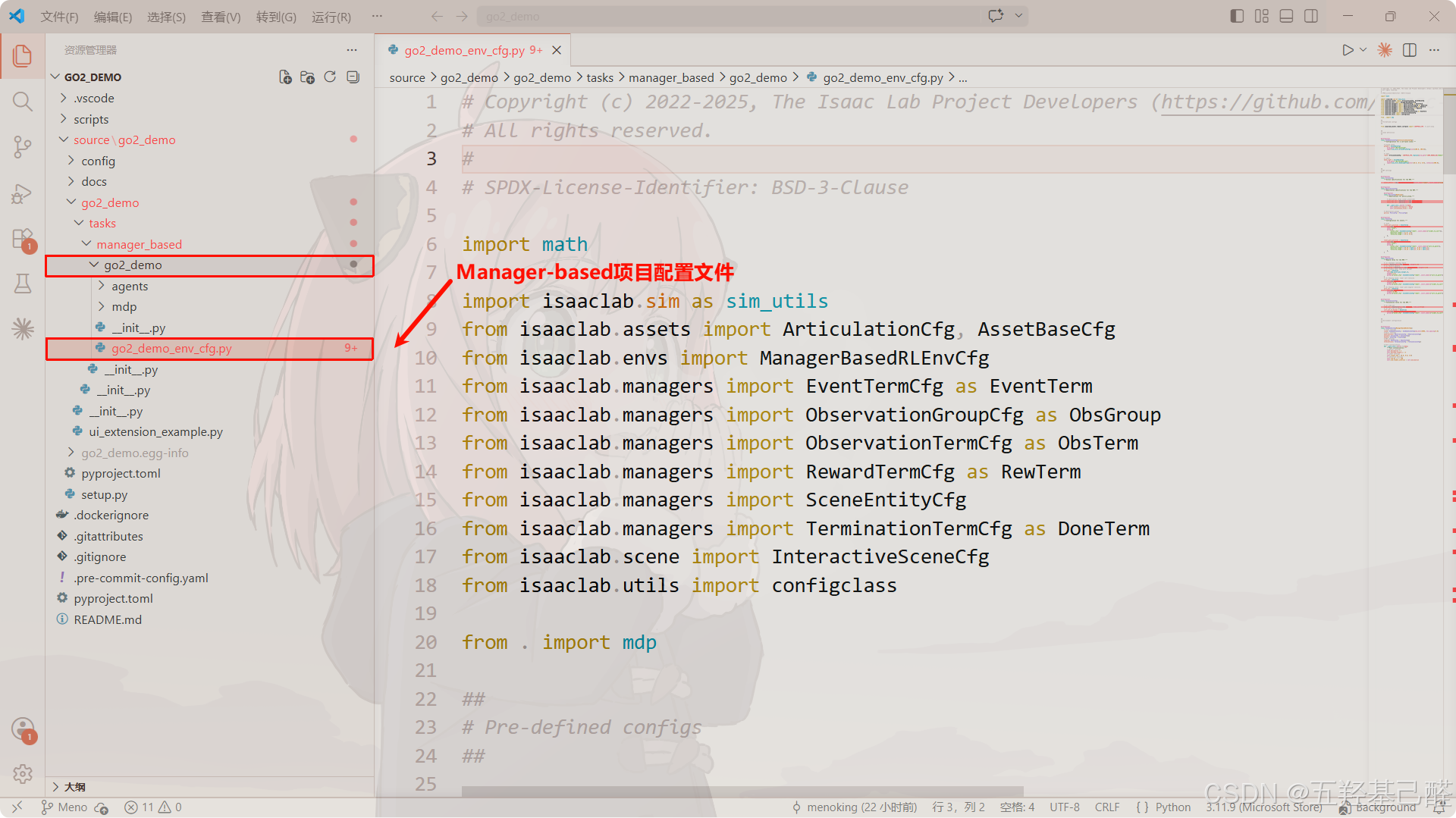
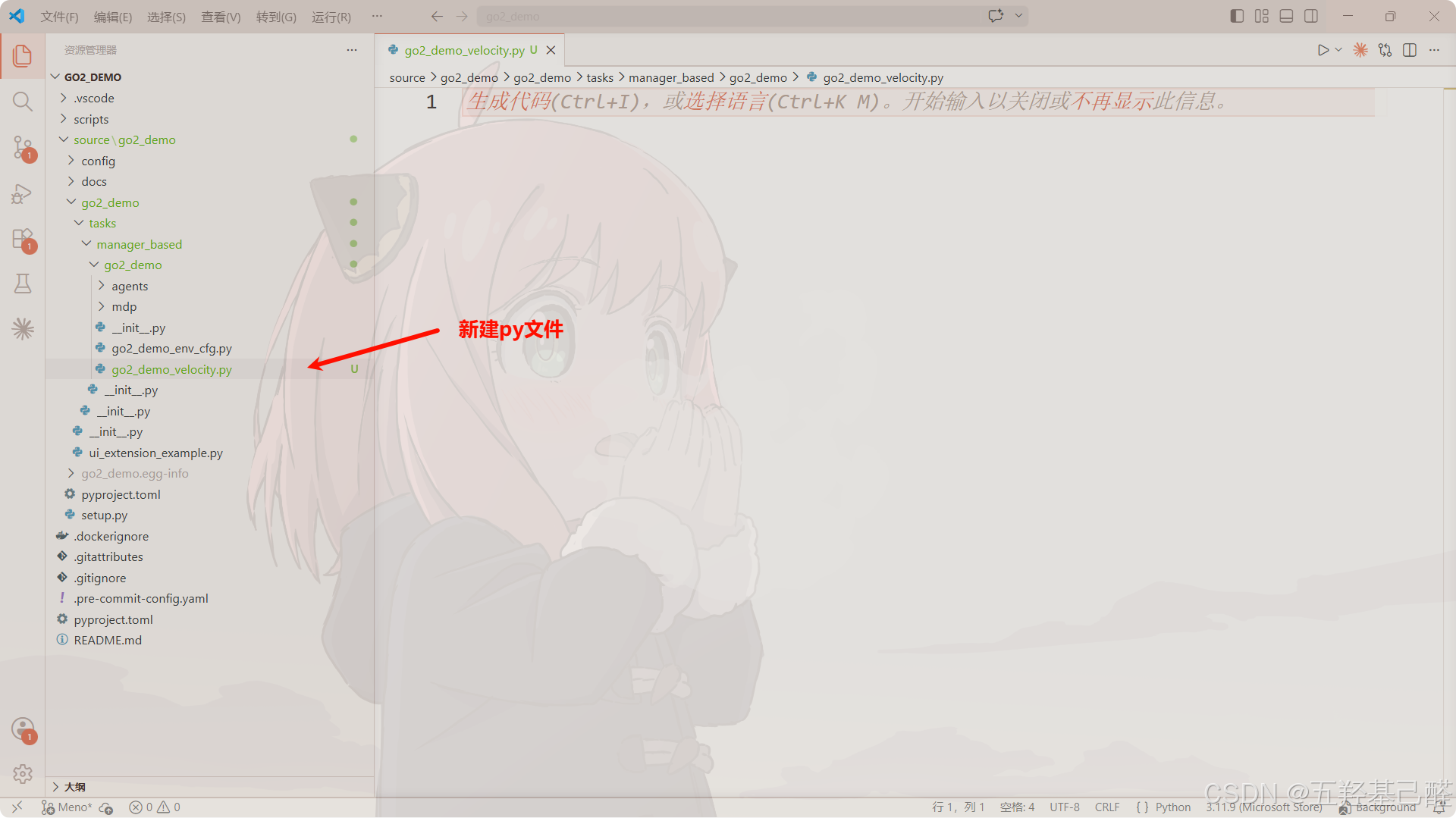
然后在VS Code中打开我们新建的项目,定位到go2_demo_env_cfg.py这个Manager-based项目配置文件,并在同目录下新建一个配置文件,名字可自取,这里新建为go2_demo_velocity.py:
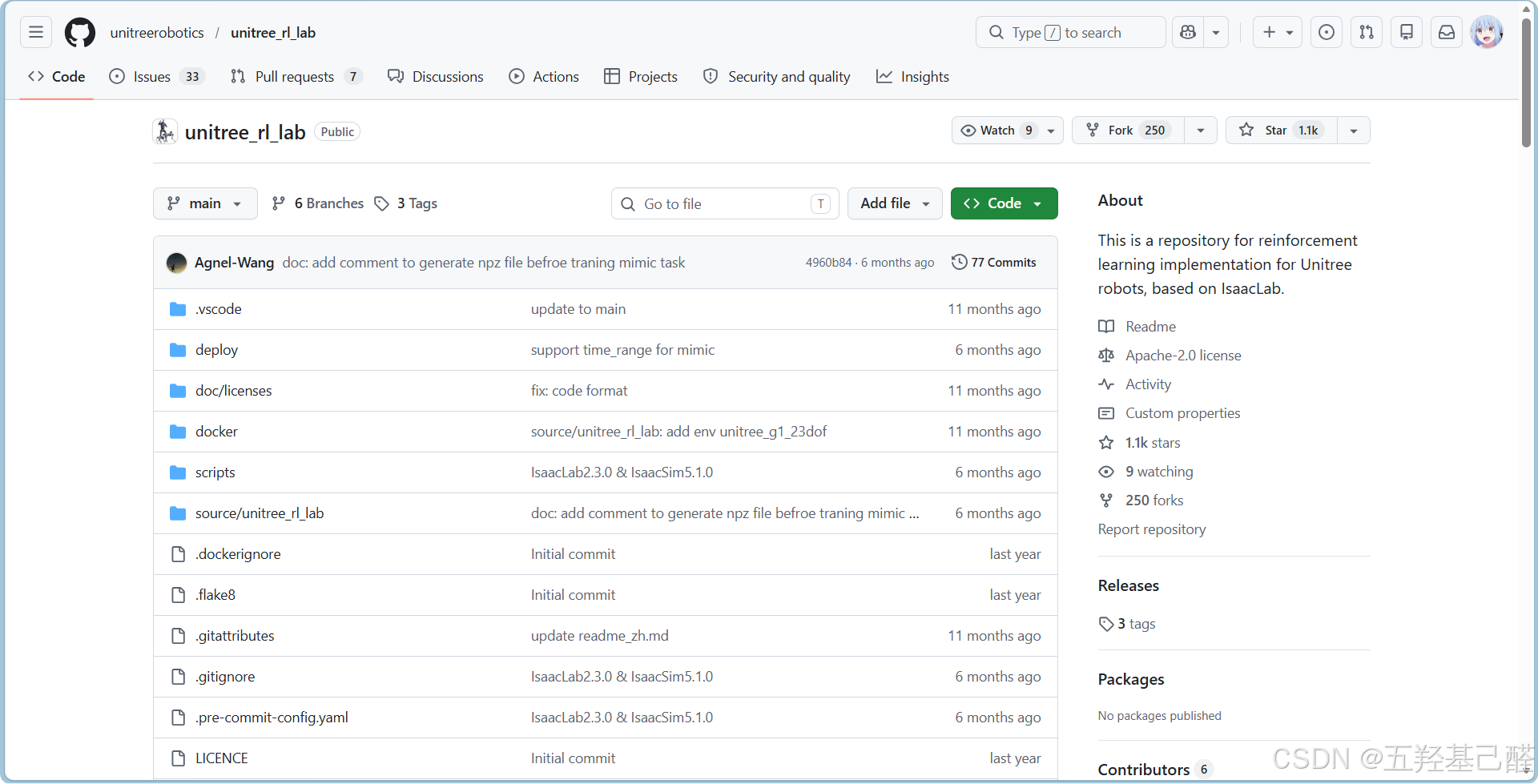
Unitree宇树官方仓库
在Unitree Robotics中可以找到unitreerobotics/unitree_rl_lab: This is a repository for reinforcement learning implementation for Unitree robots, based on IsaacLab.
为强化学习专用环境仓库:
基本配置
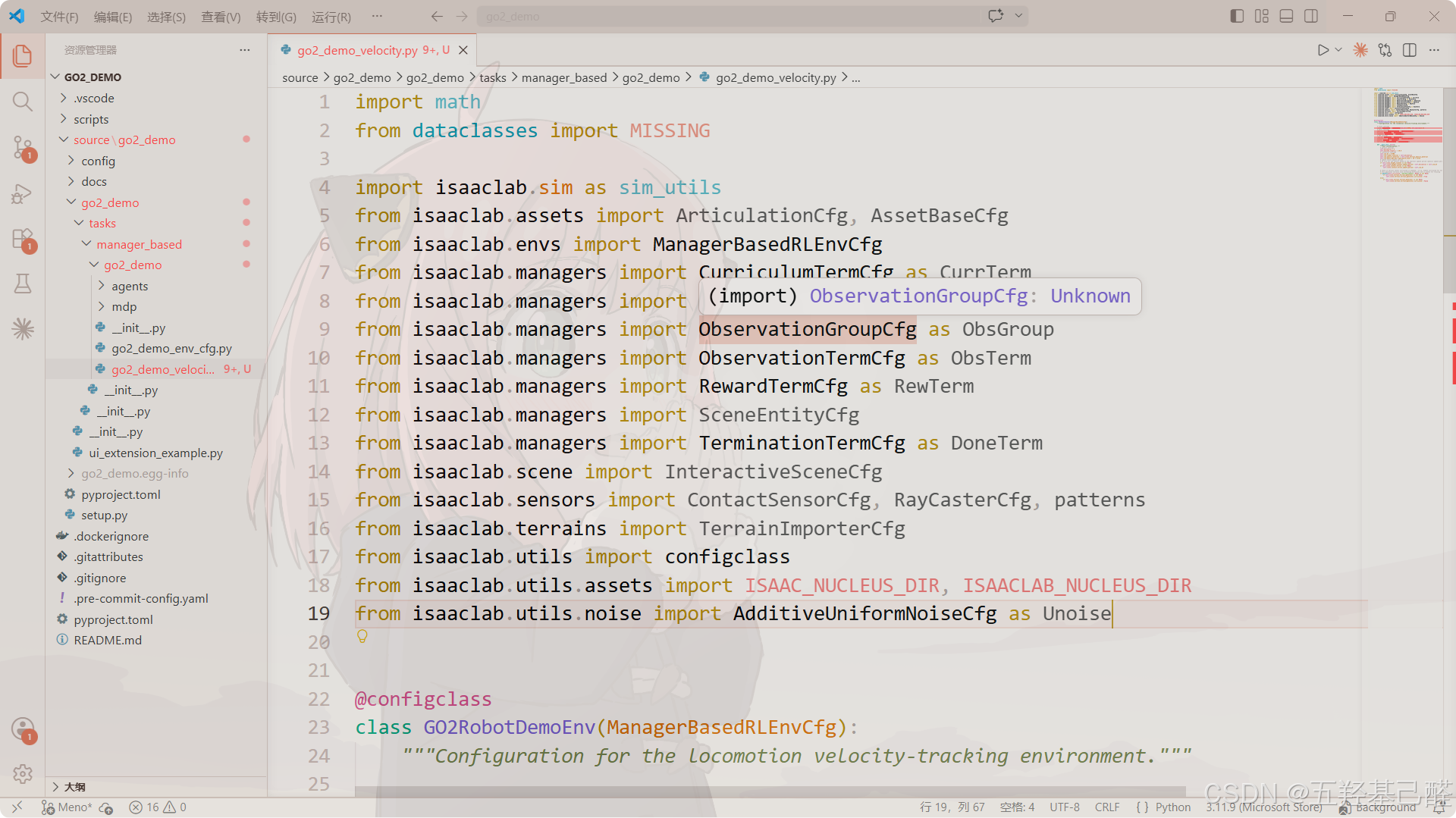
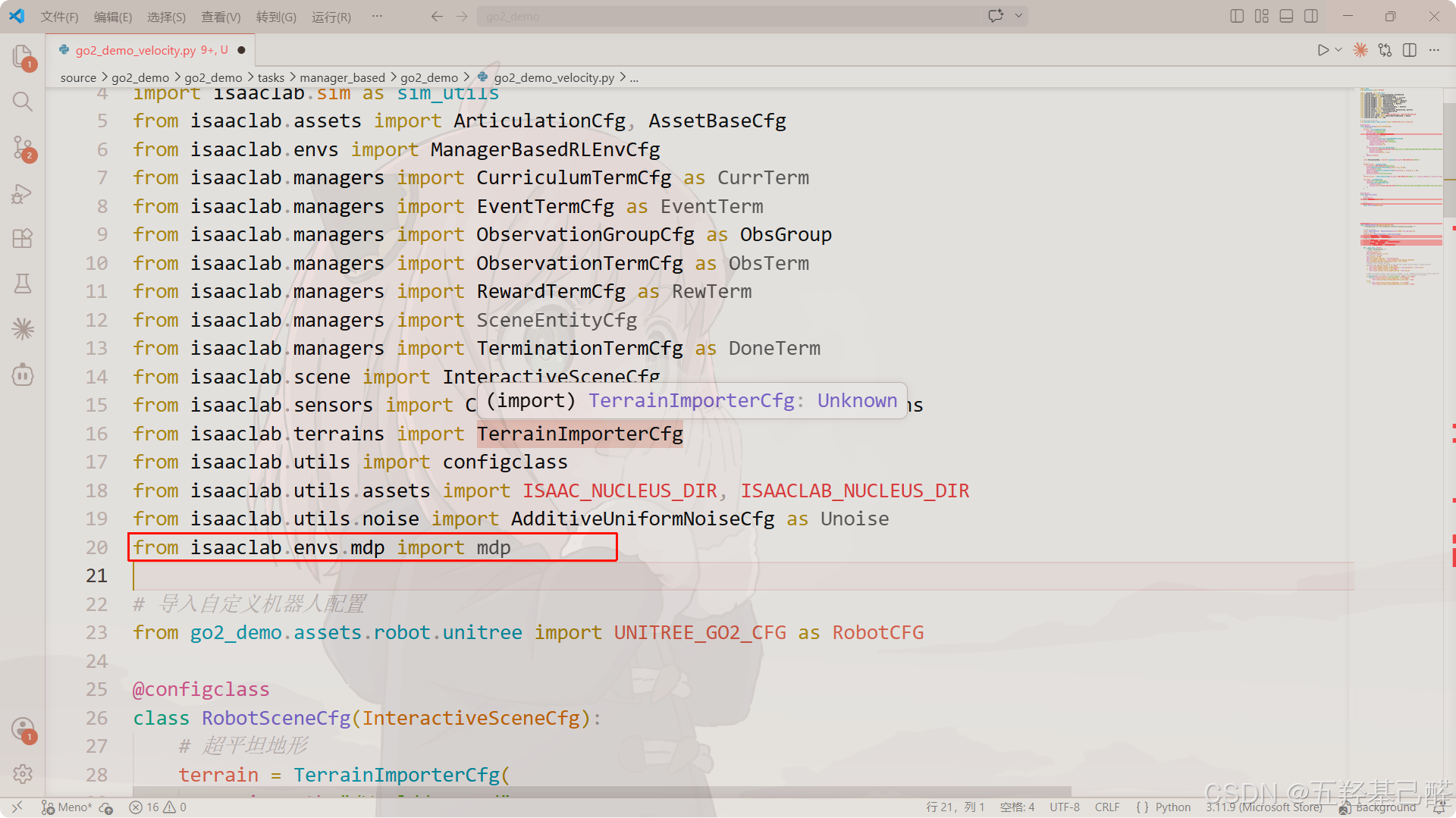
现在新建py配置文件中导入下列包:
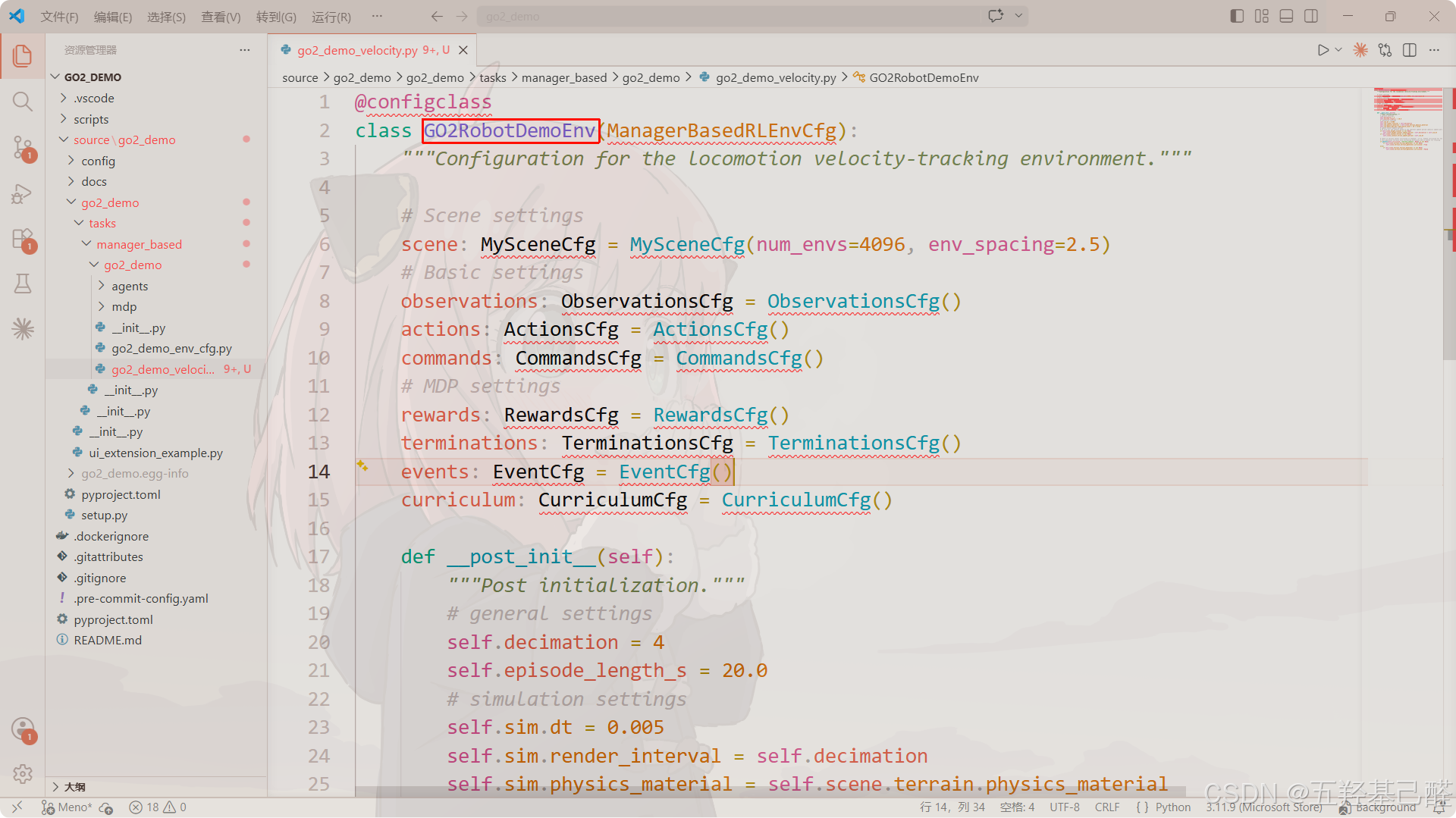
再复制LocomotionVelocityRoughEnvCfg总配置类到我们自定义的py文件中:
把类名修改成自定义名称,这里改为GO2RobotDemoEnv:
MDP类配置
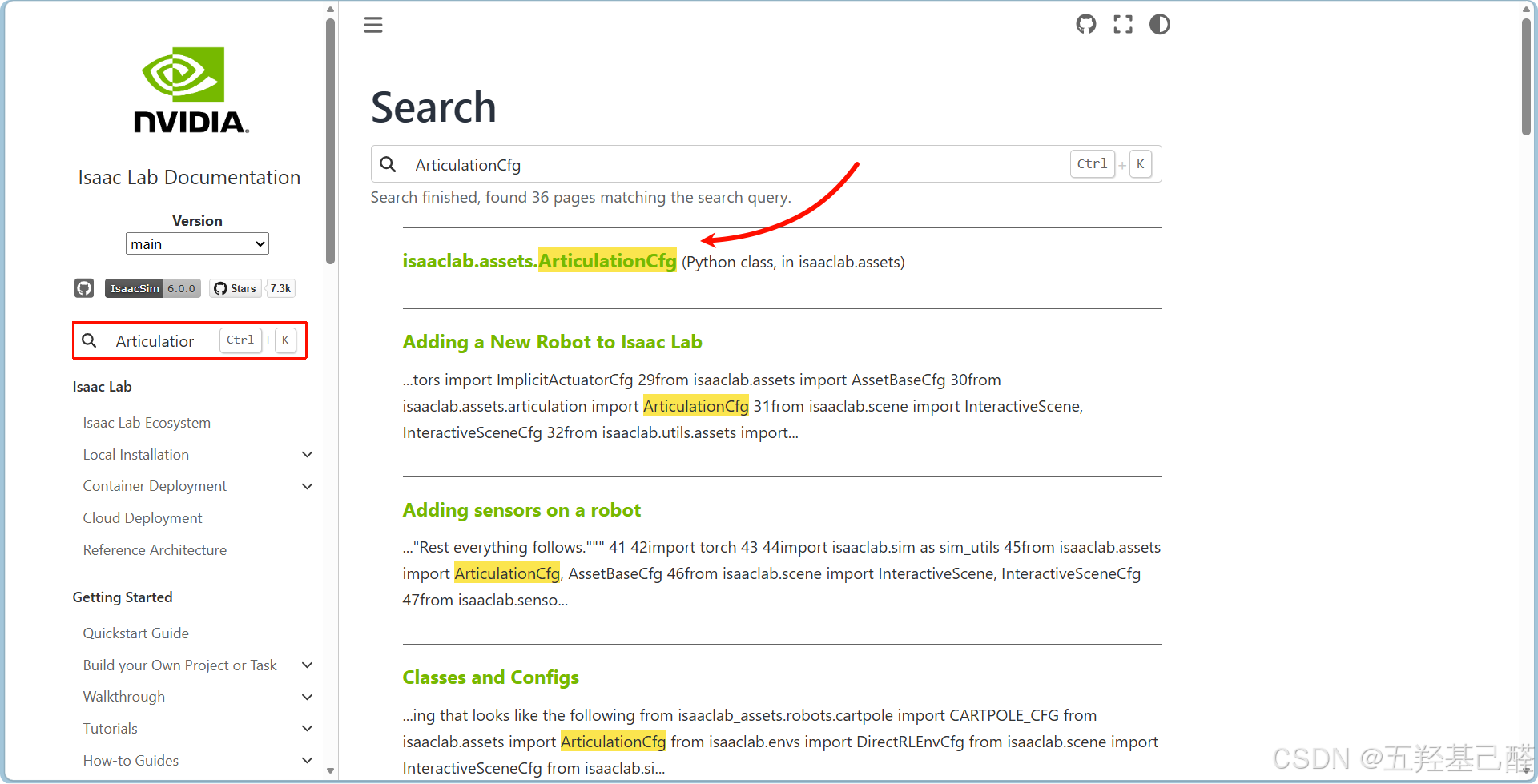
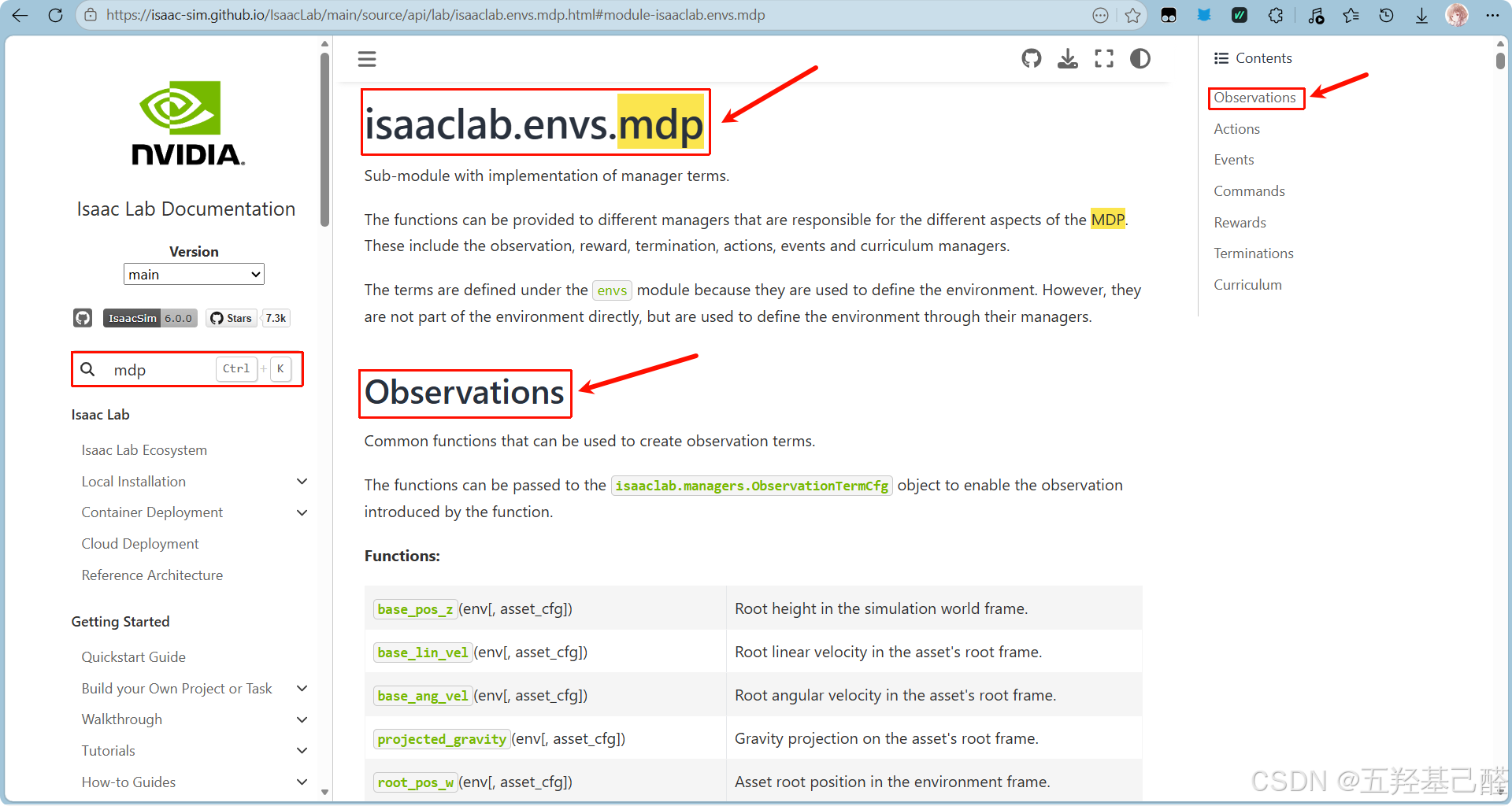
!注意以下所配置的几个MDP要素的每个参数都能在IsaacLab官方文档中搜索到查看释义与用法!
上面我们能观察到总配置类中几个基本MDP要素还没有定义,因此接下来我们要逐项定义场景、观测、奖励等等。
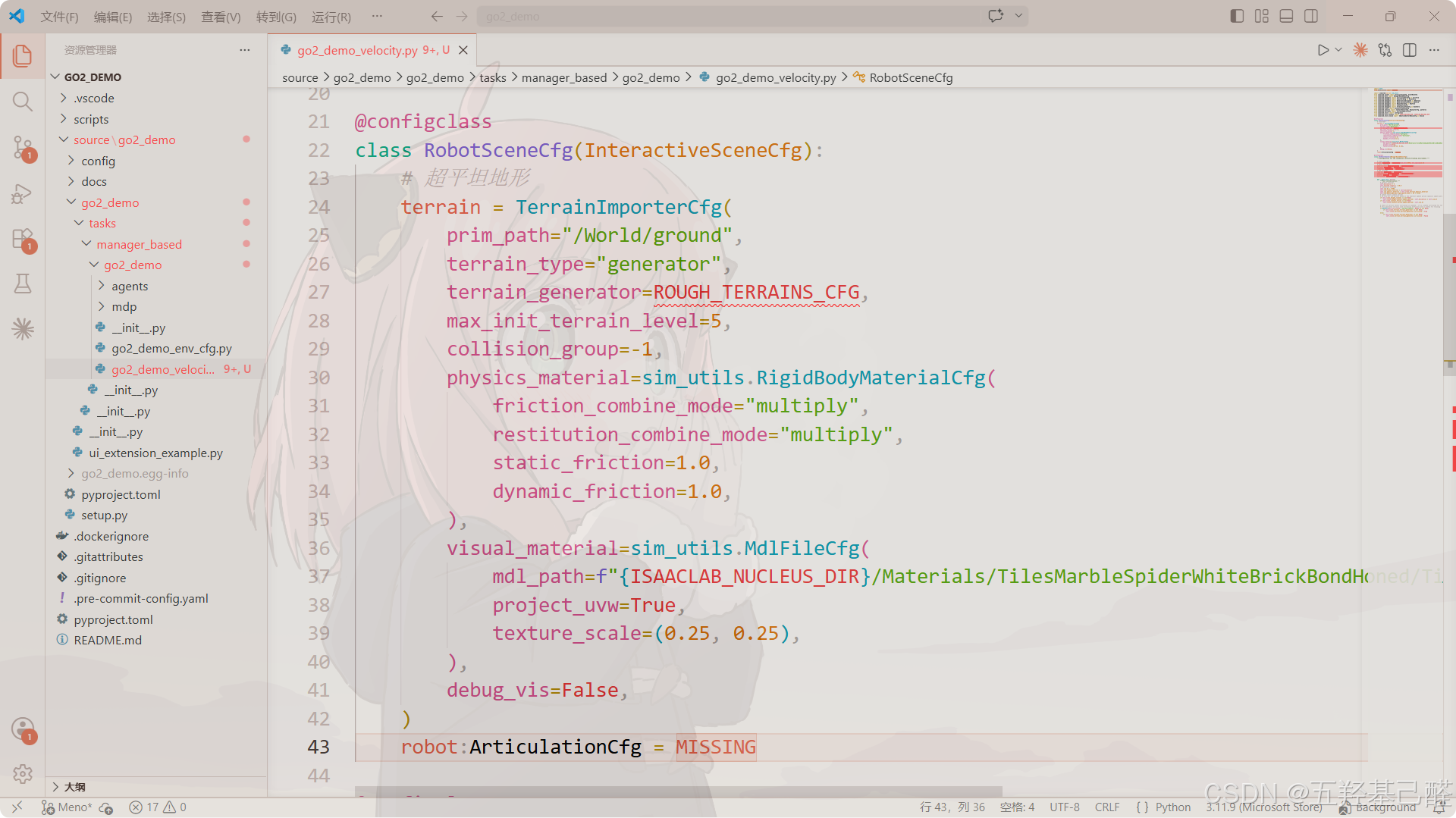
场景配置类scene
构建包含地形、机器人和传感器的虚拟环境。
参照官方例程自定义类,可自定义类名,这里取为RobotSceneCfg:
这里机器人部分先填缺省值,等后续导入:
python
# 环境配置
@configclass
class RobotSceneCfg(InteractiveSceneCfg):
# 超平坦地形
terrain = TerrainImporterCfg(
prim_path="/World/ground",
terrain_type="plane",
collision_group=-1,
physics_material=sim_utils.RigidBodyMaterialCfg(
friction_combine_mode="multiply",
restitution_combine_mode="multiply",
static_friction=1.0,
dynamic_friction=1.0,
),
visual_material=sim_utils.MdlFileCfg(
mdl_path=f"{ISAACLAB_NUCLEUS_DIR}/Materials/TilesMarbleSpiderWhiteBrickBondHoned/TilesMarbleSpiderWhiteBrickBondHoned.mdl",
project_uvw=True,
texture_scale=(0.25, 0.25),
),
debug_vis=False,
)
robot:ArticulationCfg = RobotCFG.replace(prim_path="{ENV_REGEX_NS}/Robot")克隆Go2宇树官方USD文件
进入前面提到的宇树强化学习仓库,克隆下来USD文件:
bash
git clone https://huggingface.co/datasets/unitreerobotics/unitree_model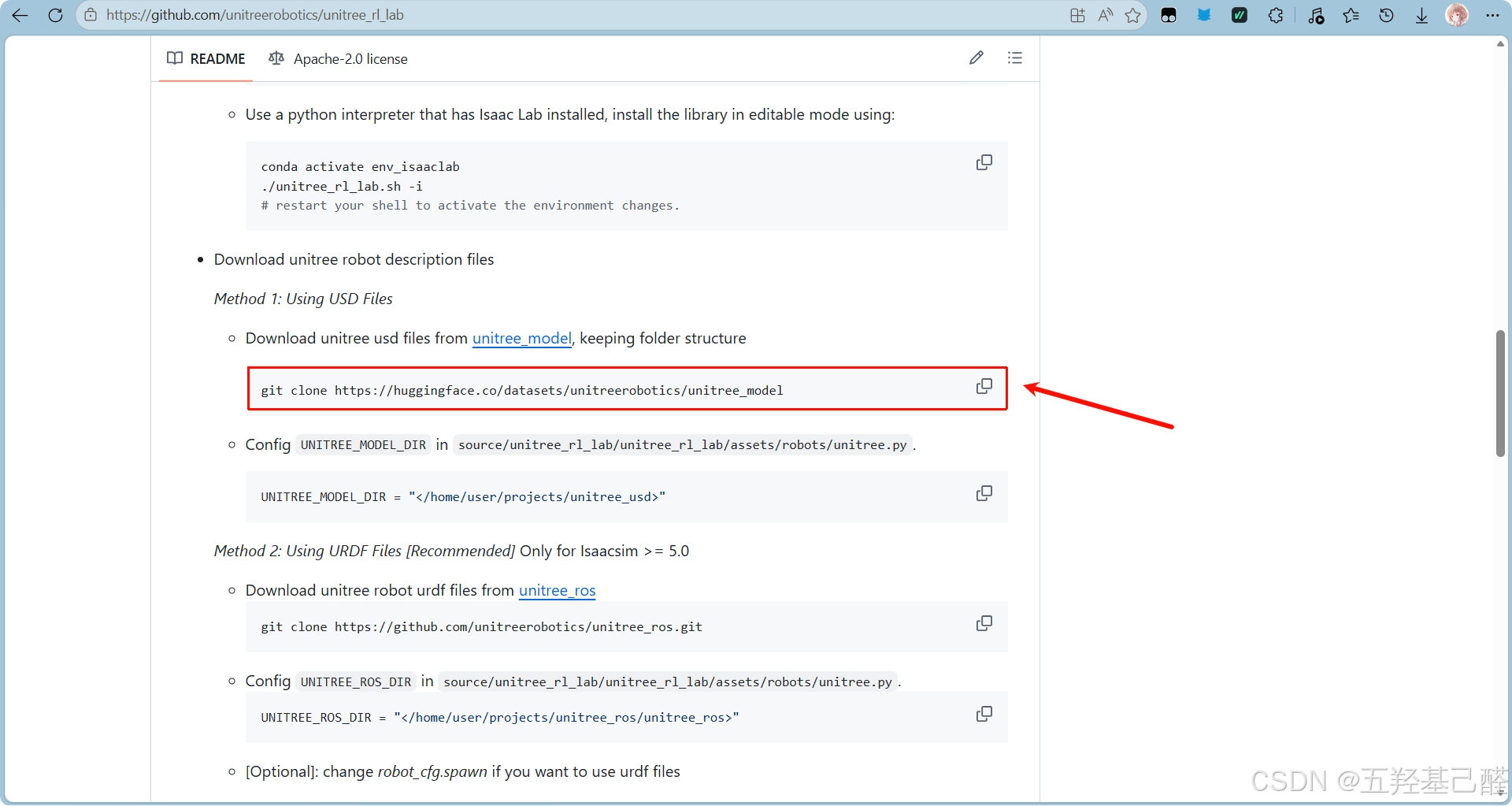
新建assets\robot目录(注意:assets要和task同根目录),在此目录下克隆:

同时在此目录(assets\robot)下新建unitree.py文件对模型进行配置:
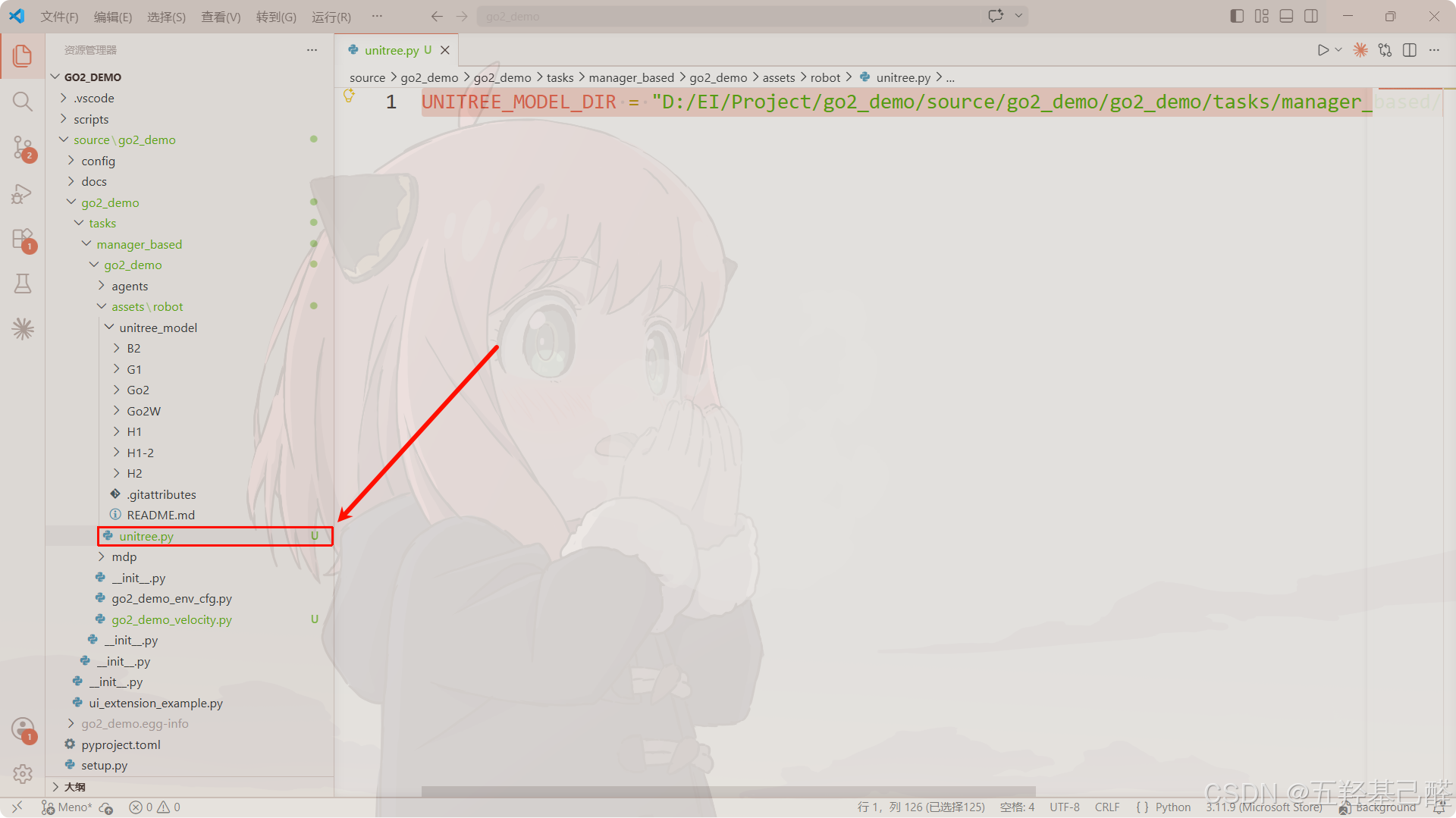
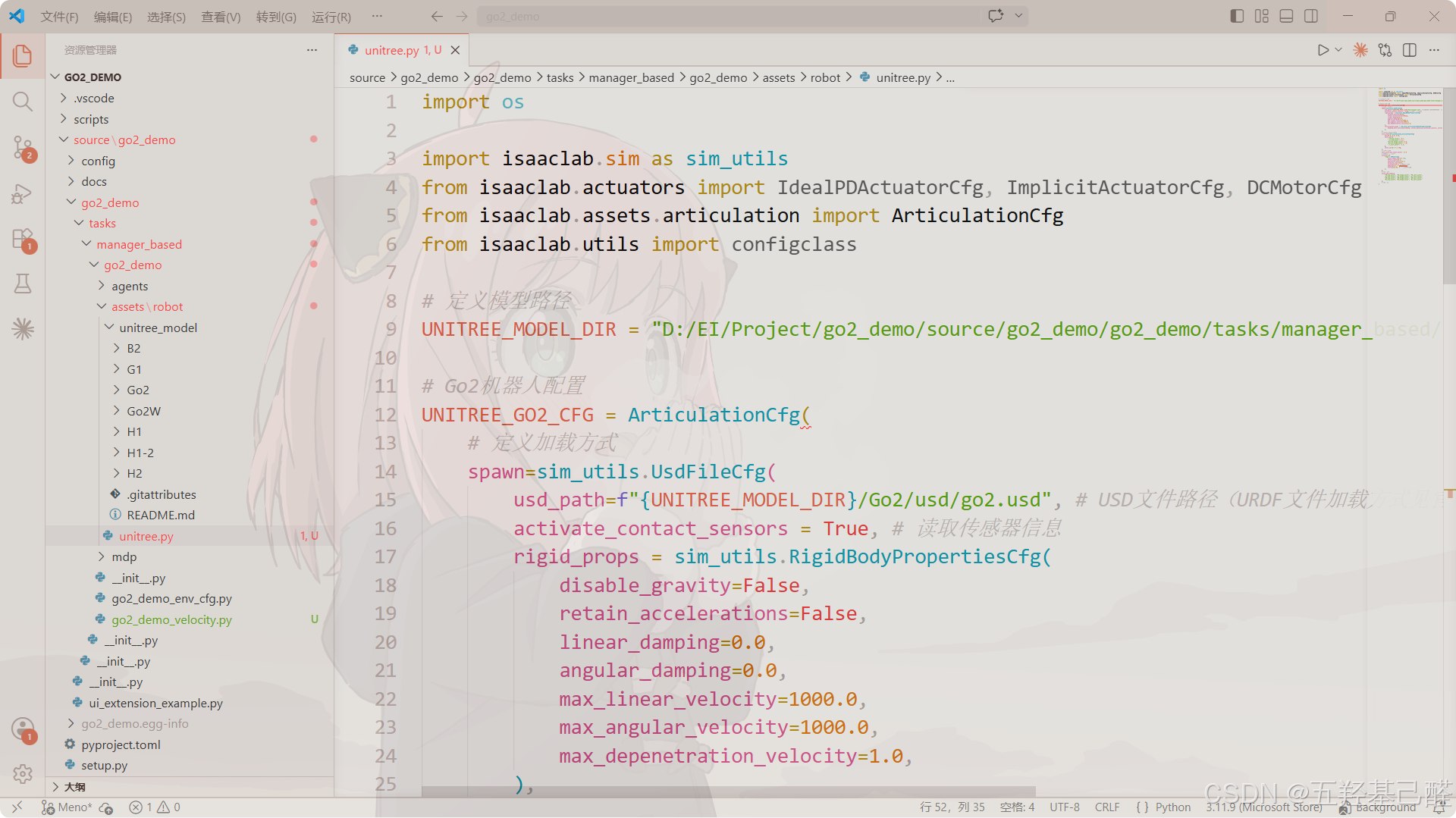
来到宇树强化学习仓库中以官方Unitree.py脚本作为示例,导入所需包以及定义模型路径(注意脚本里路径应用正斜杠"/"):
python
UNITREE_MODEL_DIR = "Your Path"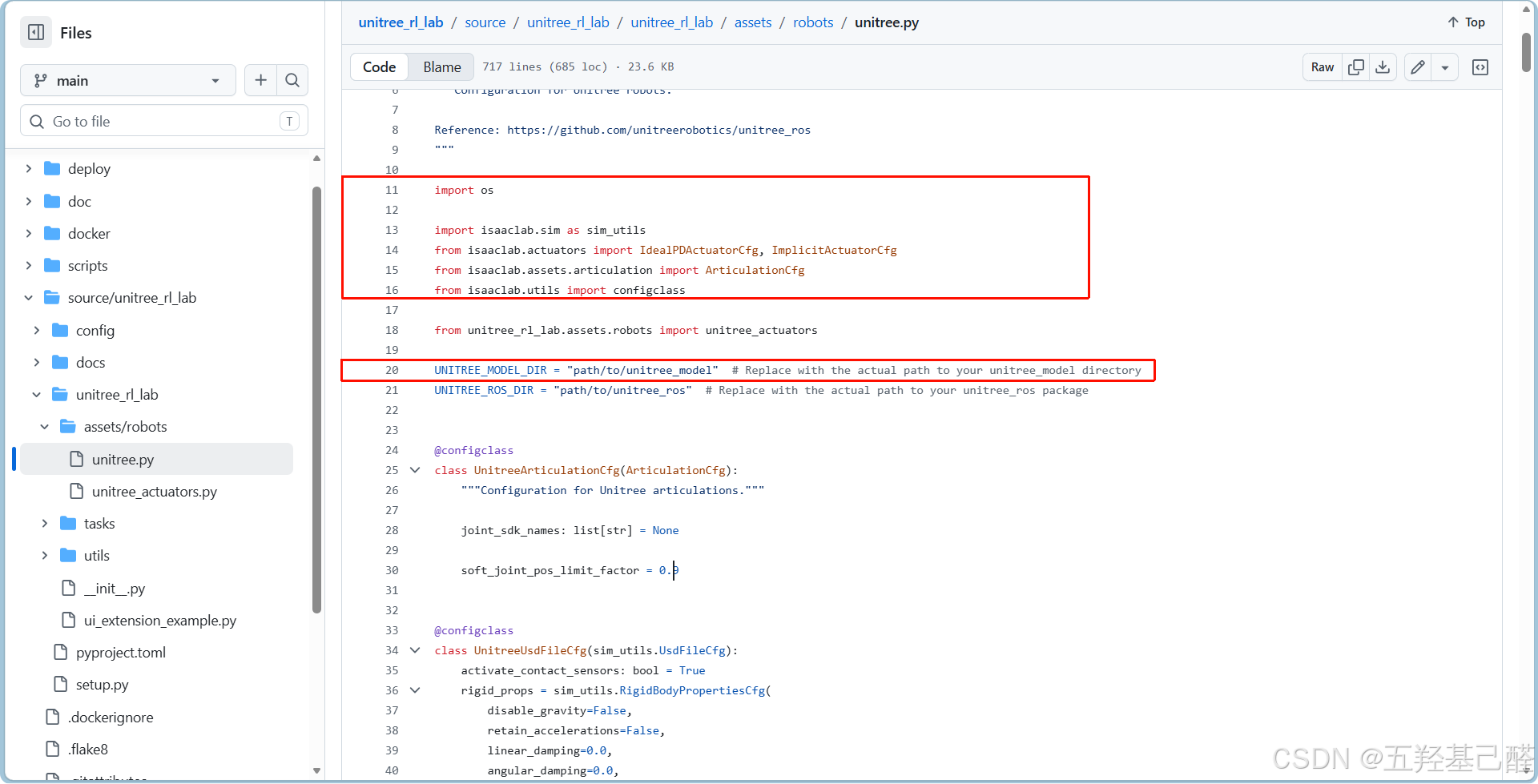
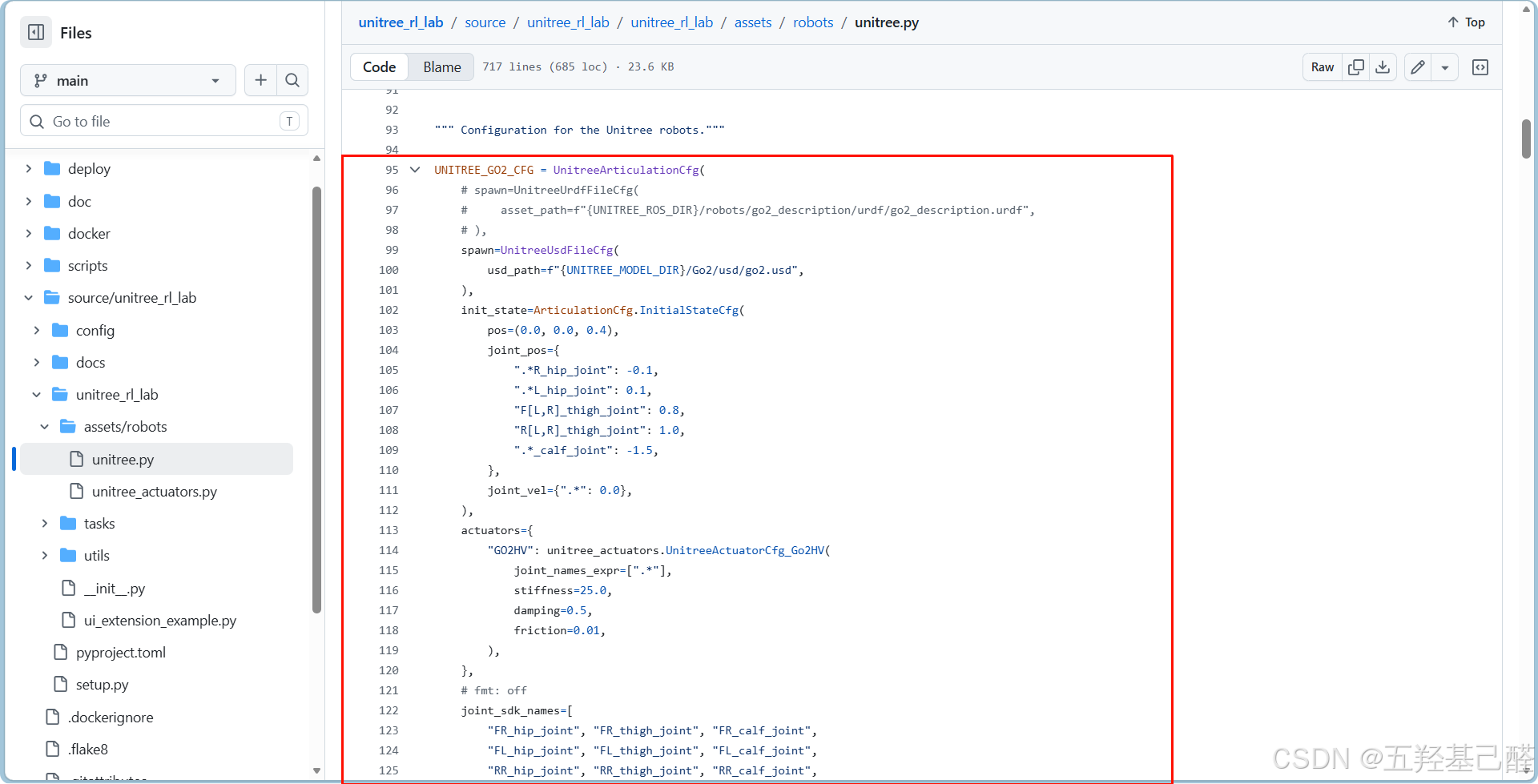
找到GO2的配置代码复制到自己的脚本里,稍作修改:
python
import os
import isaaclab.sim as sim_utils
from isaaclab.actuators import IdealPDActuatorCfg, ImplicitActuatorCfg, DCMotorCfg
from isaaclab.assets.articulation import ArticulationCfg
from isaaclab.utils import configclass
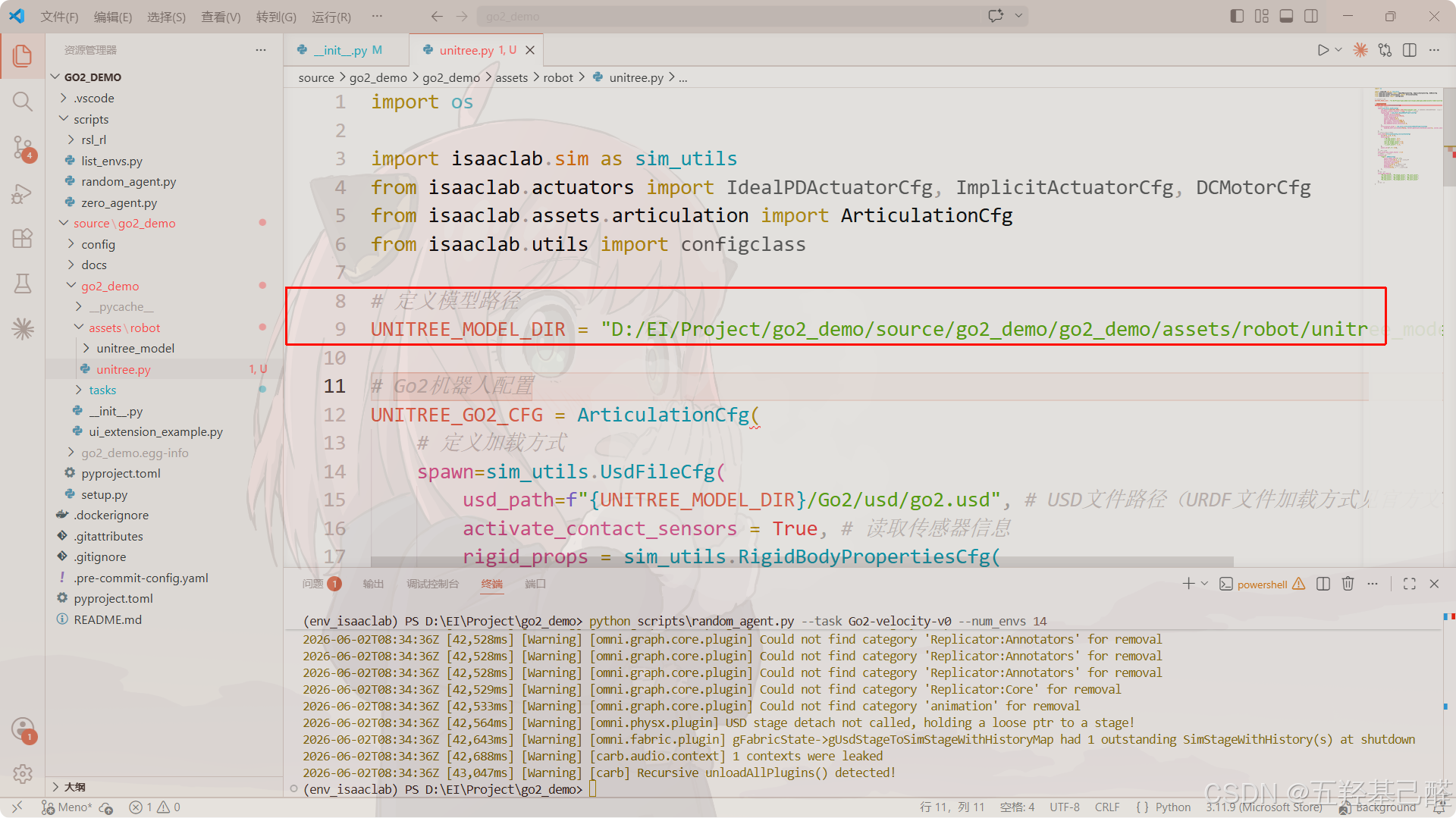
# 定义模型路径
UNITREE_MODEL_DIR = "D:/EI/Project/go2_demo/source/go2_demo/go2_demo/assets/robot/unitree_model"
# Go2机器人配置
UNITREE_GO2_CFG = ArticulationCfg(
# 定义加载方式
spawn=sim_utils.UsdFileCfg(
usd_path=f"{UNITREE_MODEL_DIR}/Go2/usd/go2.usd", # USD文件路径(URDF文件加载方式见官方文档)
activate_contact_sensors = True, # 读取传感器信息
rigid_props = sim_utils.RigidBodyPropertiesCfg(
disable_gravity=False,
retain_accelerations=False,
linear_damping=0.0,
angular_damping=0.0,
max_linear_velocity=1000.0,
max_angular_velocity=1000.0,
max_depenetration_velocity=1.0,
),
articulation_props = sim_utils.ArticulationRootPropertiesCfg(
enabled_self_collisions=False, solver_position_iteration_count=4, solver_velocity_iteration_count=0
),
),
# 定义机器人初始状态
init_state=ArticulationCfg.InitialStateCfg(
pos=(0.0, 0.0, 0.4),
joint_pos={
".*R_hip_joint": -0.1,
".*L_hip_joint": 0.1,
"F[L,R]_thigh_joint": 0.8,
"R[L,R]_thigh_joint": 1.0,
".*_calf_joint": -1.5,
},
joint_vel={".*": 0.0},
),
# 软限位系数
soft_joint_pos_limit_factor = 0.9
# 核心:执行器模型
actuators={
"legs": DCMotorCfg(
joint_names_expr=[".*"],
effort_limit=23.5, # 输出力矩上限
saturation_effort=23.5,
velocity_limit=30.0,
stiffness=25.0, # PD控制中的P
damping=0.5, # PD控制中的D
friction=0.01, # 执行器摩擦系数
),
},
)
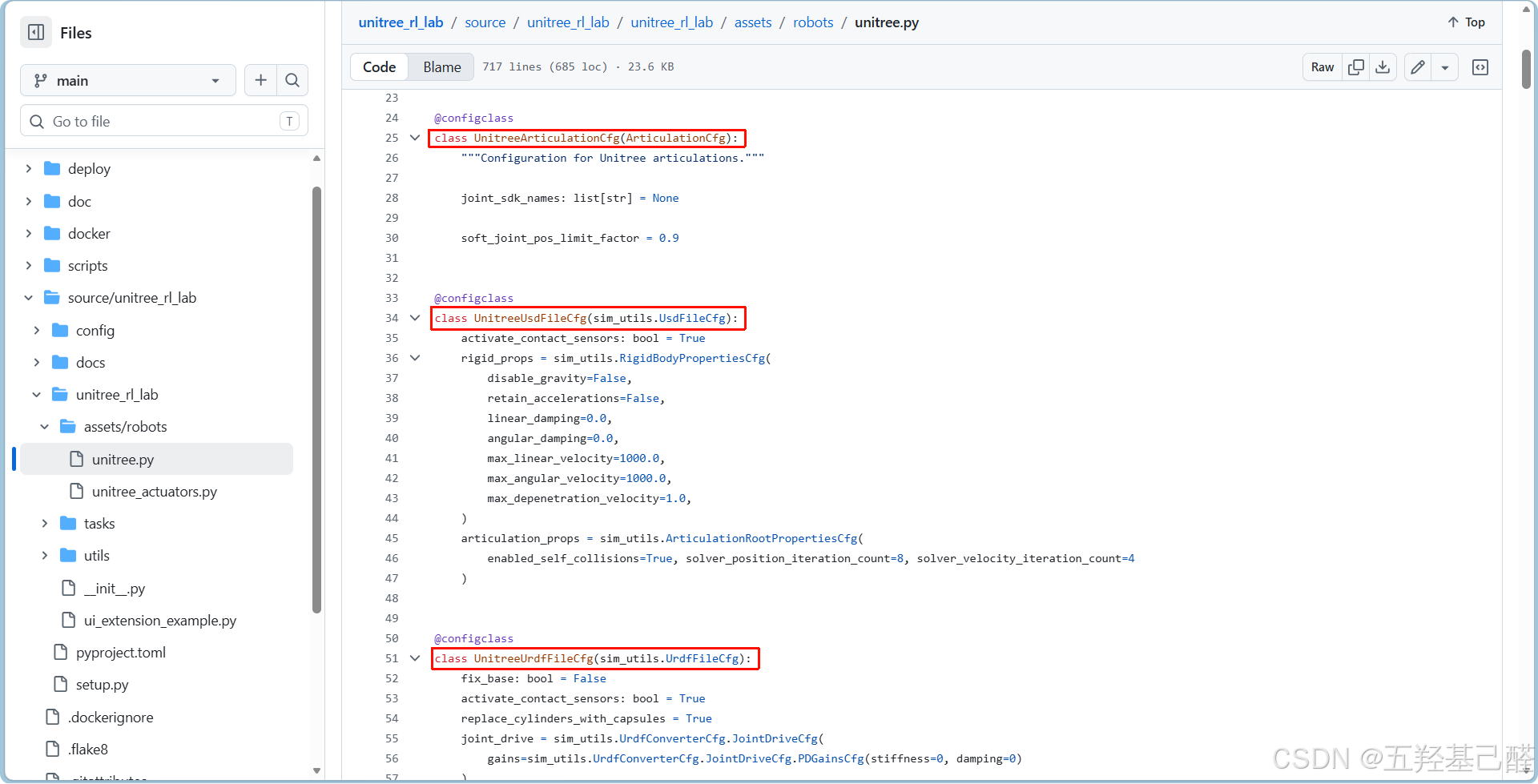
- 这里把宇树的子类换成对应的父类。
- 同时可以在IsaacLab中查看对应配置项的参数信息:
再回到go2_demo_velocity.py导入上述编写好的包:
python
# 导入自定义机器人配置
from go2_demo.assets.robot.unitree import UNITREE_GO2_CFG as RobotCFG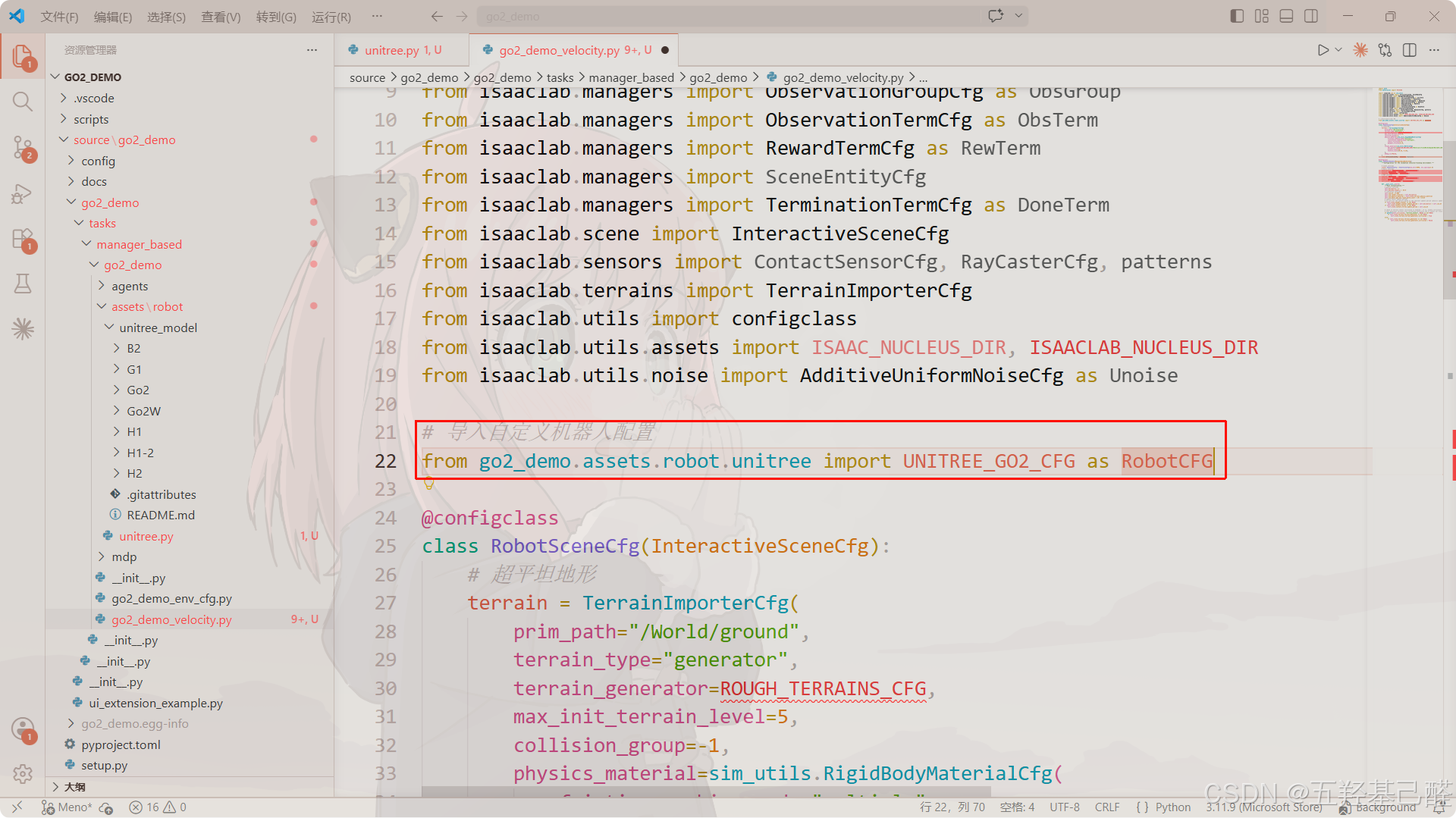
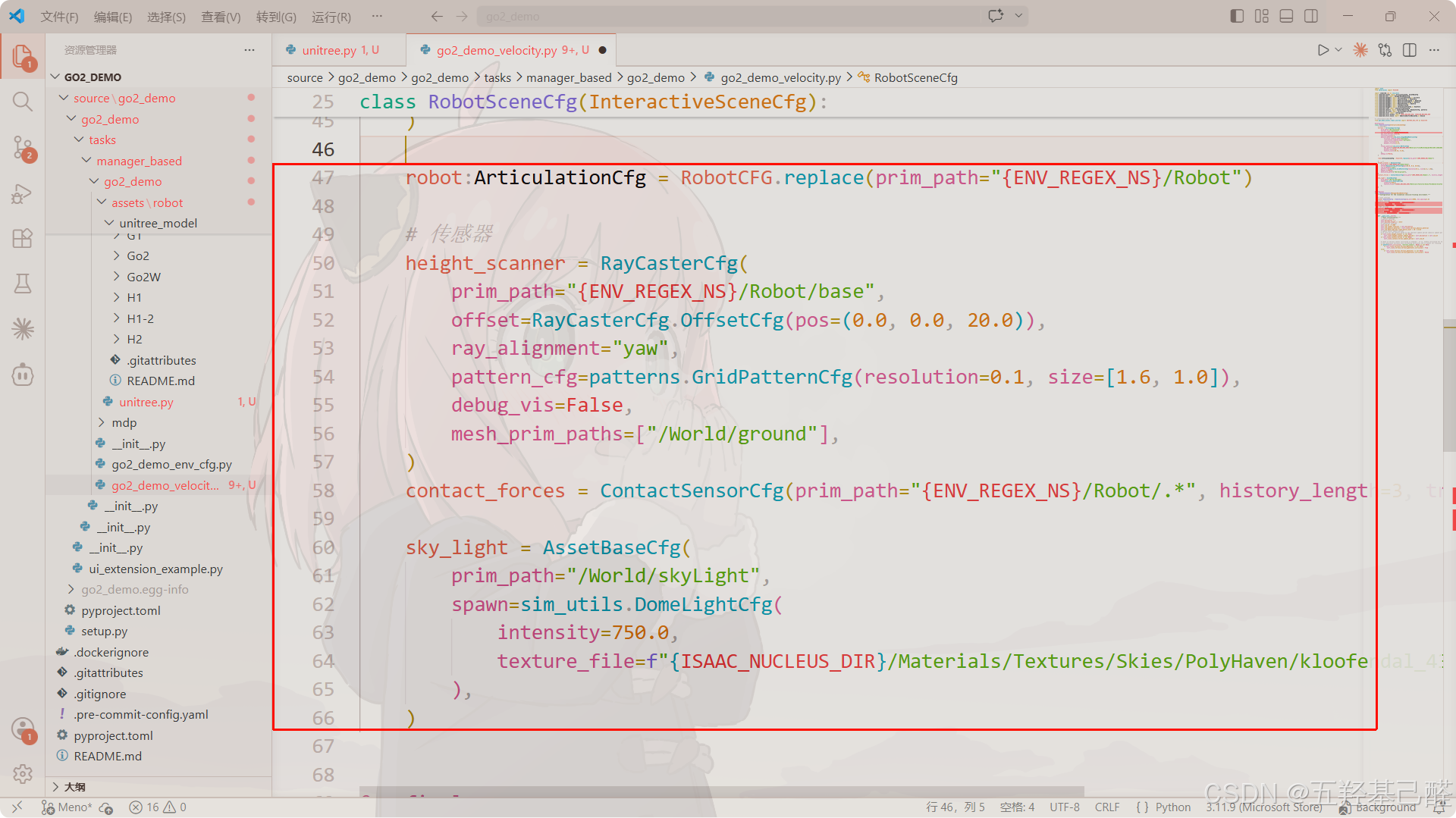
补充机器人信息并按照示例程序添加传感器:
python
robot:ArticulationCfg = RobotCFG.replace(prim_path="{ENV_REGEX_NS}/Robot")
# 传感器
height_scanner = RayCasterCfg(
prim_path="{ENV_REGEX_NS}/Robot/base",
offset=RayCasterCfg.OffsetCfg(pos=(0.0, 0.0, 20.0)),
ray_alignment="yaw",
pattern_cfg=patterns.GridPatternCfg(resolution=0.1, size=[1.6, 1.0]),
debug_vis=False,
mesh_prim_paths=["/World/ground"],
)
contact_forces = ContactSensorCfg(prim_path="{ENV_REGEX_NS}/Robot/.*", history_length=3, track_air_time=True)
sky_light = AssetBaseCfg(
prim_path="/World/skyLight",
spawn=sim_utils.DomeLightCfg(
intensity=750.0,
texture_file=f"{ISAAC_NUCLEUS_DIR}/Materials/Textures/Skies/PolyHaven/kloofendal_43d_clear_puresky_4k.hdr",
),
)
观测配置类observations
定义策略网络可获取的状态信息(如关节角度、速度、地形扫描)。
注意先导入mdp包:
官方示例中的这一部分就是观测项配置:
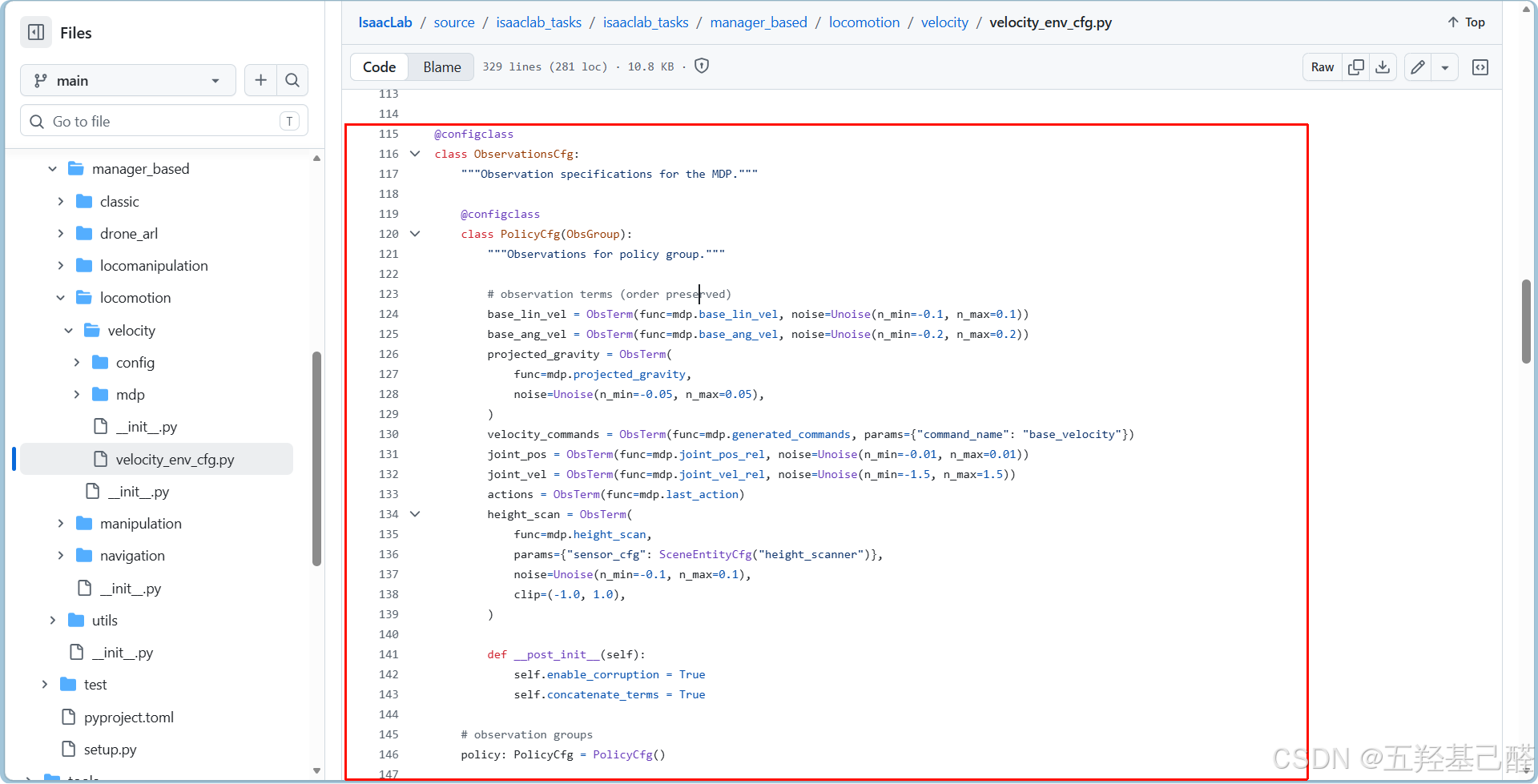
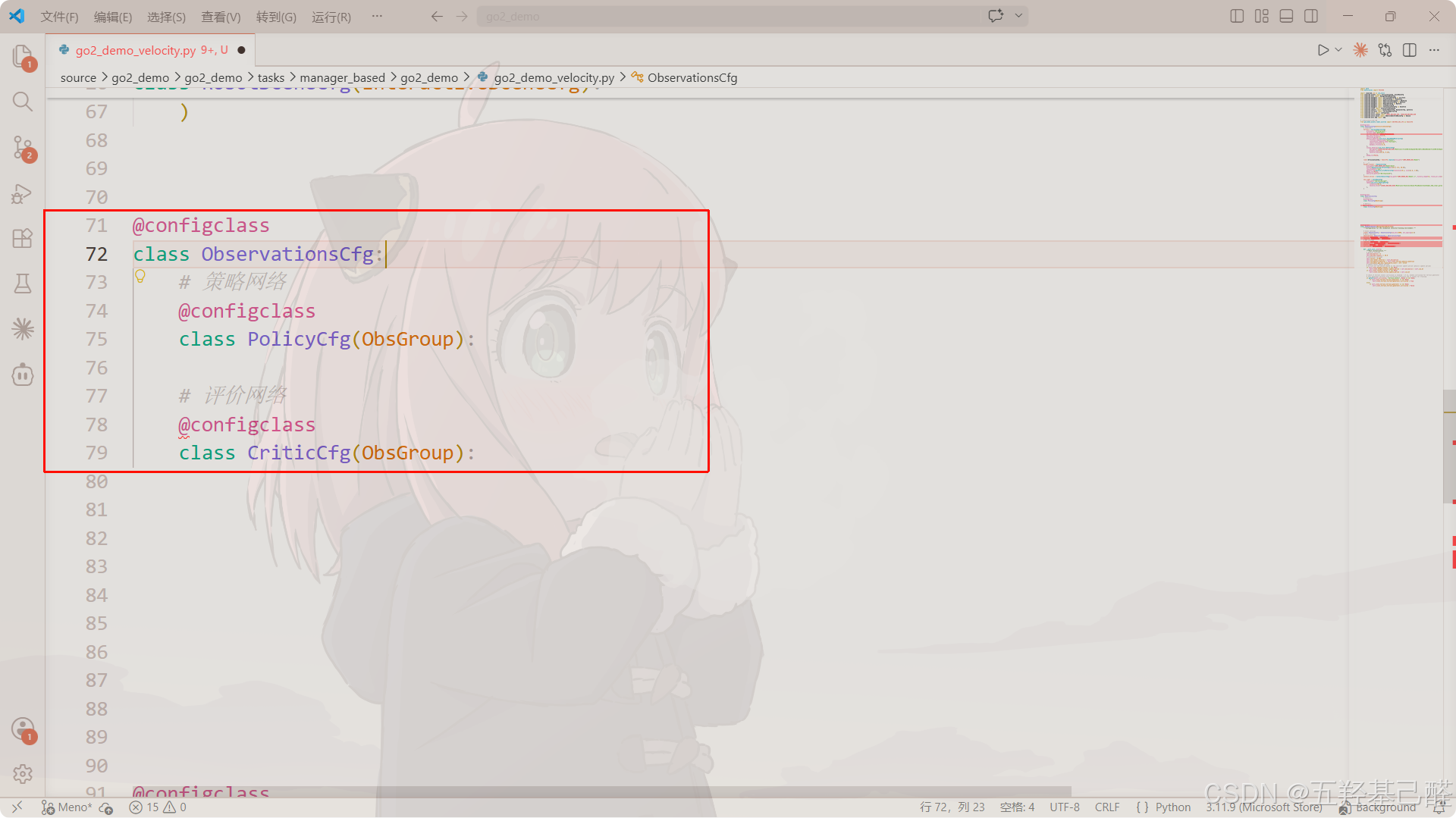
对比官方示例我们先构建出策略网络和评价网络的观测项框架:
官方文档中可以查询已经封装好的观测项:
对照示例中的代码:
python
@configclass
class ObservationsCfg:
# 策略网络
@configclass
class PolicyCfg(ObsGroup):
"""Observations for policy group."""
# 机体线速度
base_lin_vel = ObsTerm(func=mdp.base_lin_vel, noise=Unoise(n_min=-0.1, n_max=0.1))
# 机体角速度
base_ang_vel = ObsTerm(func=mdp.base_ang_vel, noise=Unoise(n_min=-0.2, n_max=0.2))
# 投影重力
projected_gravity = ObsTerm(
func=mdp.projected_gravity,
noise=Unoise(n_min=-0.05, n_max=0.05),
)
# 速度指令
velocity_commands = ObsTerm(func=mdp.generated_commands, params={"command_name": "base_velocity"})
# 关节位置
joint_pos = ObsTerm(func=mdp.joint_pos_rel, noise=Unoise(n_min=-0.01, n_max=0.01))
# 关节速度
joint_vel = ObsTerm(func=mdp.joint_vel_rel, noise=Unoise(n_min=-1.5, n_max=1.5))
# 上一次动作
actions = ObsTerm(func=mdp.last_action)
# 高度扫描
height_scan = ObsTerm(
func=mdp.height_scan,
params={"sensor_cfg": SceneEntityCfg("height_scanner")},
noise=Unoise(n_min=-0.1, n_max=0.1),
clip=(-1.0, 1.0),
)
def __post_init__(self):
self.enable_corruption = True
self.concatenate_terms = True
# observation groups
policy: PolicyCfg = PolicyCfg()
# 评价网络
@configclass
class CriticCfg(ObsGroup):
base_lin_vel = ObsTerm(func=mdp.base_lin_vel, noise=Unoise(n_min=-0.1, n_max=0.1))
base_ang_vel = ObsTerm(func=mdp.base_ang_vel, noise=Unoise(n_min=-0.2, n_max=0.2))
projected_gravity = ObsTerm(
func=mdp.projected_gravity,
noise=Unoise(n_min=-0.05, n_max=0.05),
)
velocity_commands = ObsTerm(func=mdp.generated_commands, params={"command_name": "base_velocity"})
joint_pos = ObsTerm(func=mdp.joint_pos_rel, noise=Unoise(n_min=-0.01, n_max=0.01))
joint_vel = ObsTerm(func=mdp.joint_vel_rel, noise=Unoise(n_min=-1.5, n_max=1.5))
actions = ObsTerm(func=mdp.last_action)
height_scan = ObsTerm(
func=mdp.height_scan,
params={"sensor_cfg": SceneEntityCfg("height_scanner")},
noise=Unoise(n_min=-0.1, n_max=0.1),
clip=(-1.0, 1.0),
)
critic: CriticCfg = CriticCfg()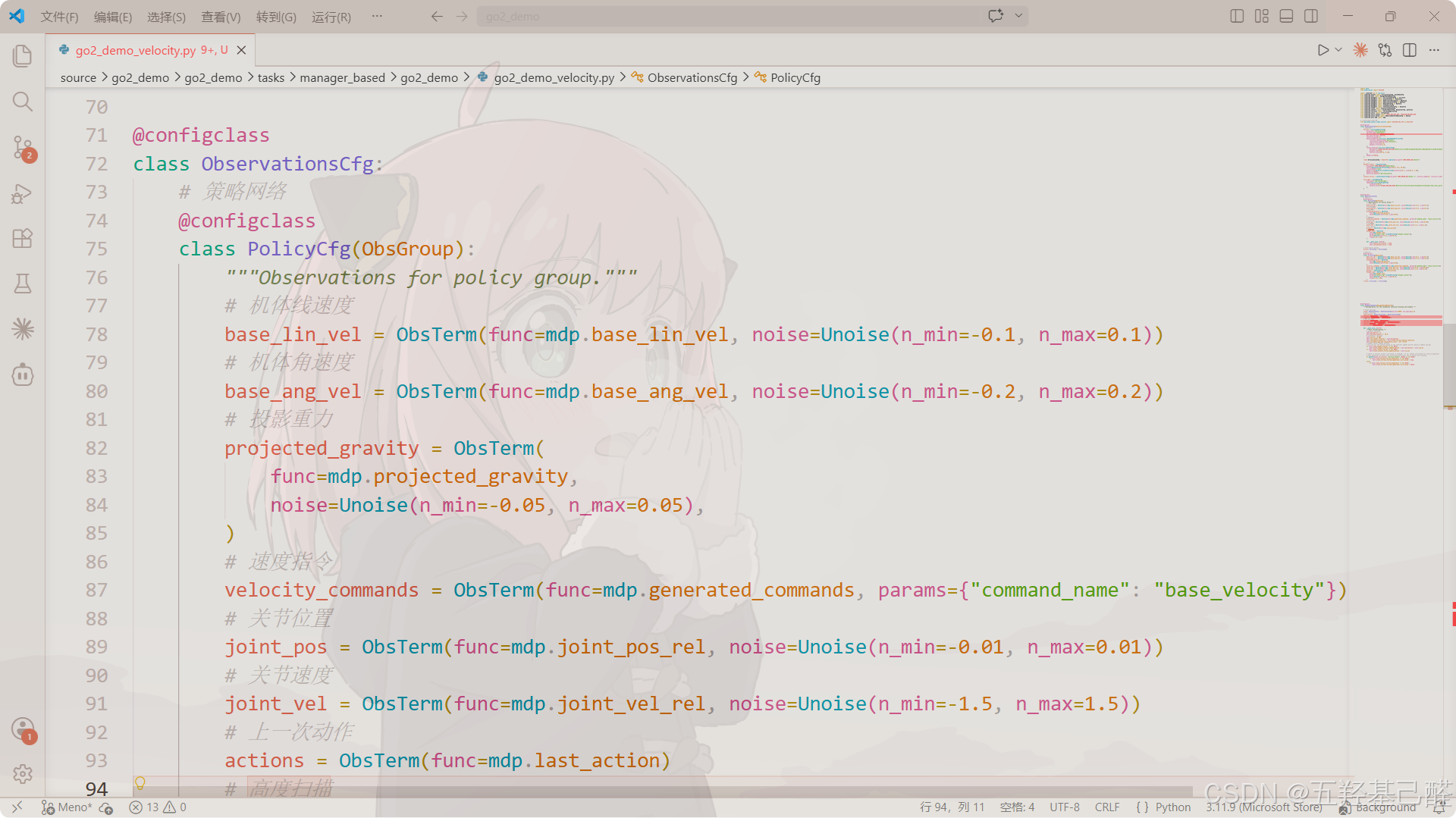
动作配置类actions
指定智能体输出的控制指令类型(如关节位置、速度或力矩)。
复制示例代码:
python
# 动作配置
@configclass
class ActionsCfg:
"""Action specifications for the MDP."""
joint_pos = mdp.JointPositionActionCfg(asset_name="robot", joint_names=[".*"], scale=0.5, use_default_offset=True) 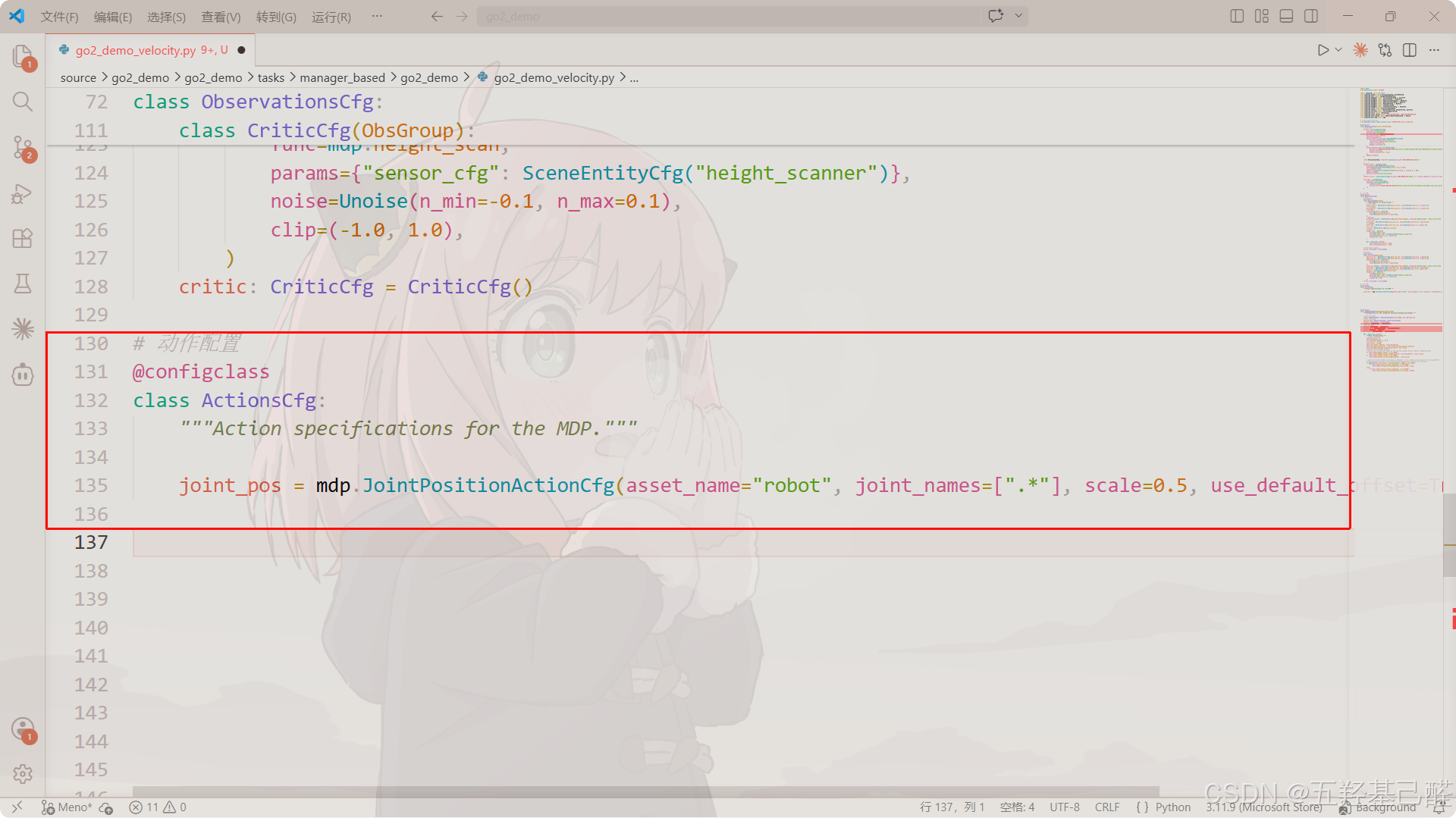
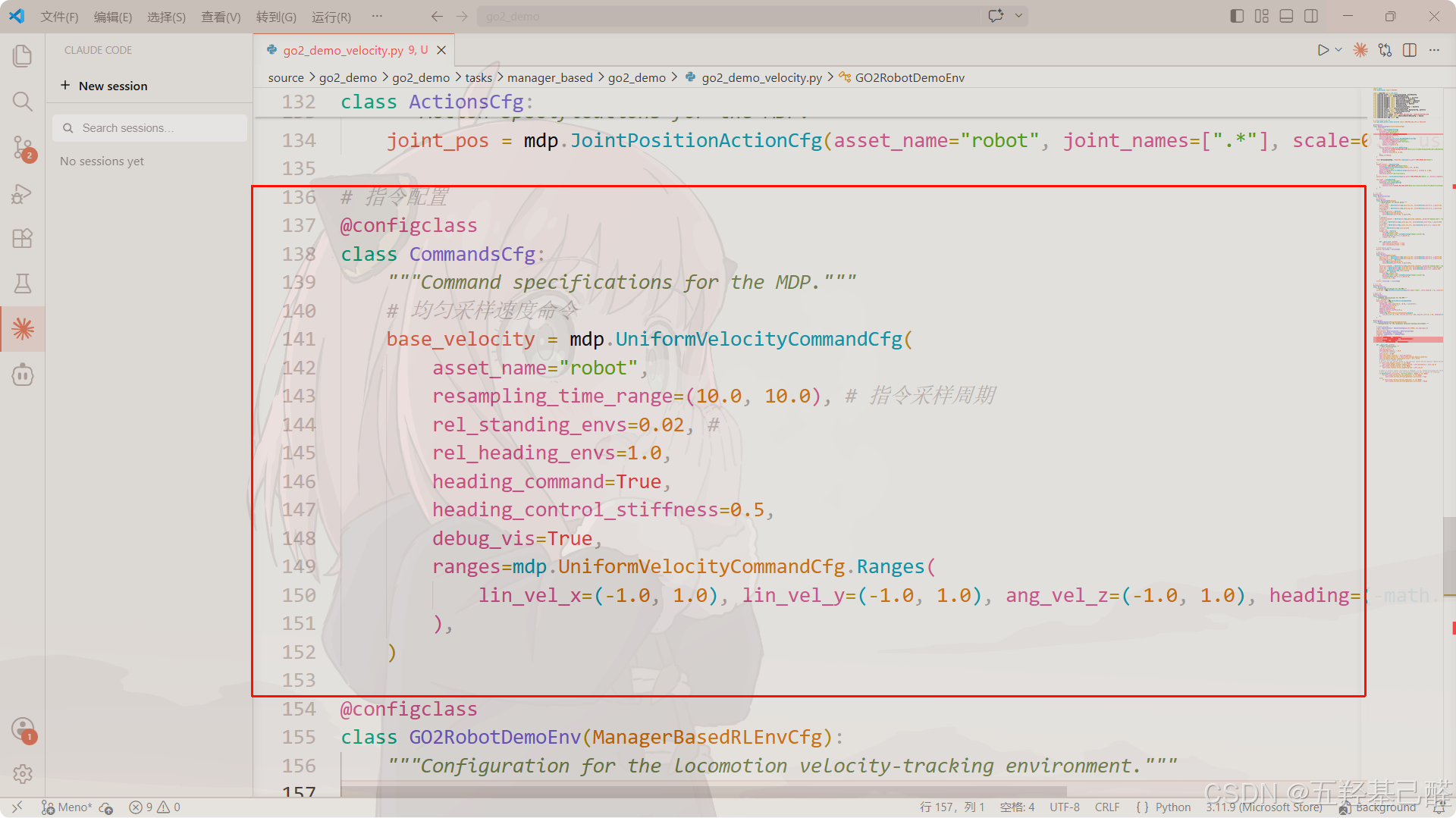
指令配置类commands
生成任务目标(如期望速度或朝向),供策略追踪。
python
@configclass
class CommandsCfg:
"""Command specifications for the MDP."""
base_velocity = mdp.UniformVelocityCommandCfg(
asset_name="robot",
resampling_time_range=(10.0, 10.0),
rel_standing_envs=0.02,
rel_heading_envs=1.0,
heading_command=True,
heading_control_stiffness=0.5,
debug_vis=True,
ranges=mdp.UniformVelocityCommandCfg.Ranges(
lin_vel_x=(-1.0, 1.0), lin_vel_y=(-1.0, 1.0), ang_vel_z=(-1.0, 1.0), heading=(-math.pi, math.pi)
),
)
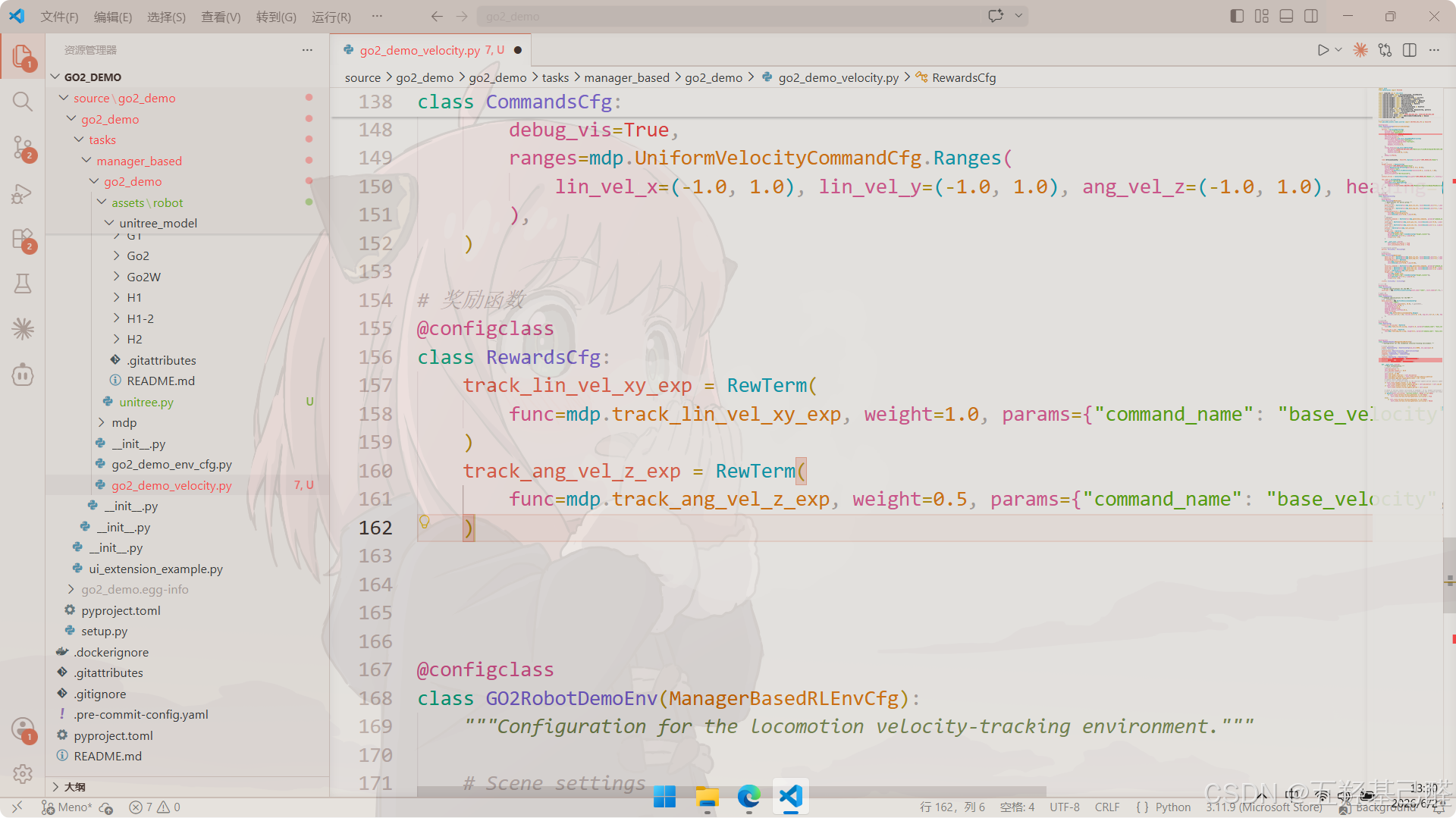
奖励配置类rewards
计算每一步的奖励信号,引导策略学习期望行为。
python
# 奖励函数
@configclass
class RewardsCfg:
track_lin_vel_xy_exp = RewTerm(
func=mdp.track_lin_vel_xy_exp, weight=1.0, params={"command_name": "base_velocity", "std": math.sqrt(0.25)}
)
track_ang_vel_z_exp = RewTerm(
func=mdp.track_ang_vel_z_exp, weight=0.5, params={"command_name": "base_velocity", "std": math.sqrt(0.25)}
)
终止条件配置类terminations
设定环境结束条件(如机器人摔倒或超时)。
python
# 终止条件
@configclass
class TerminationsCfg:
# 时间终止
time_out = DoneTerm(func=mdp.time_out, time_out=True)
# 机身碰撞地面
base_contact = DoneTerm(
func=mdp.illegal_contact,
params={"sensor_cfg": SceneEntityCfg("contact_forces", body_names="base"), "threshold": 1.0},
)
# 倾斜角度
bad_orientation = DoneTerm(func=mdp.bad_orientation, params={"limit_angle": 0.8})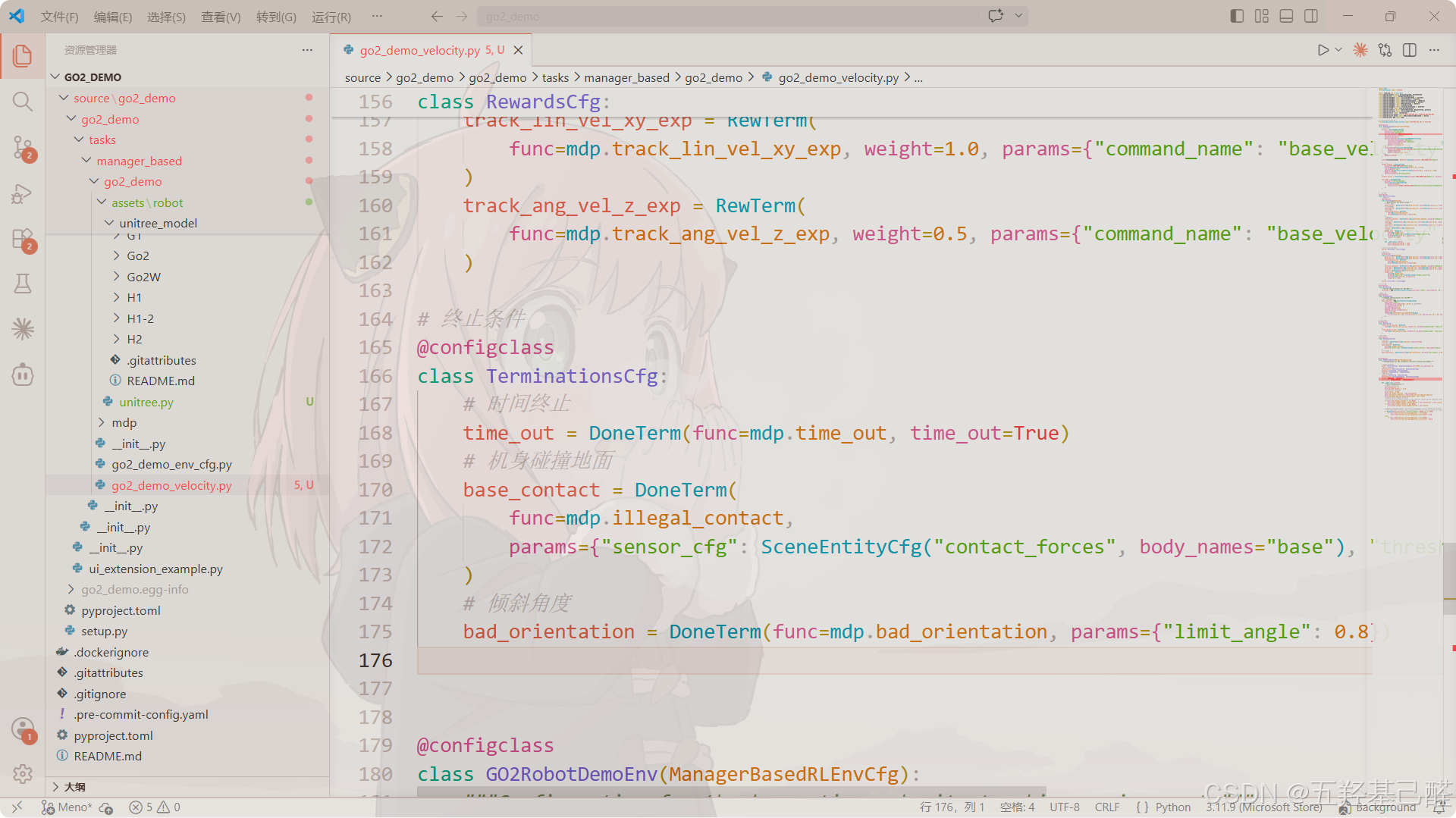
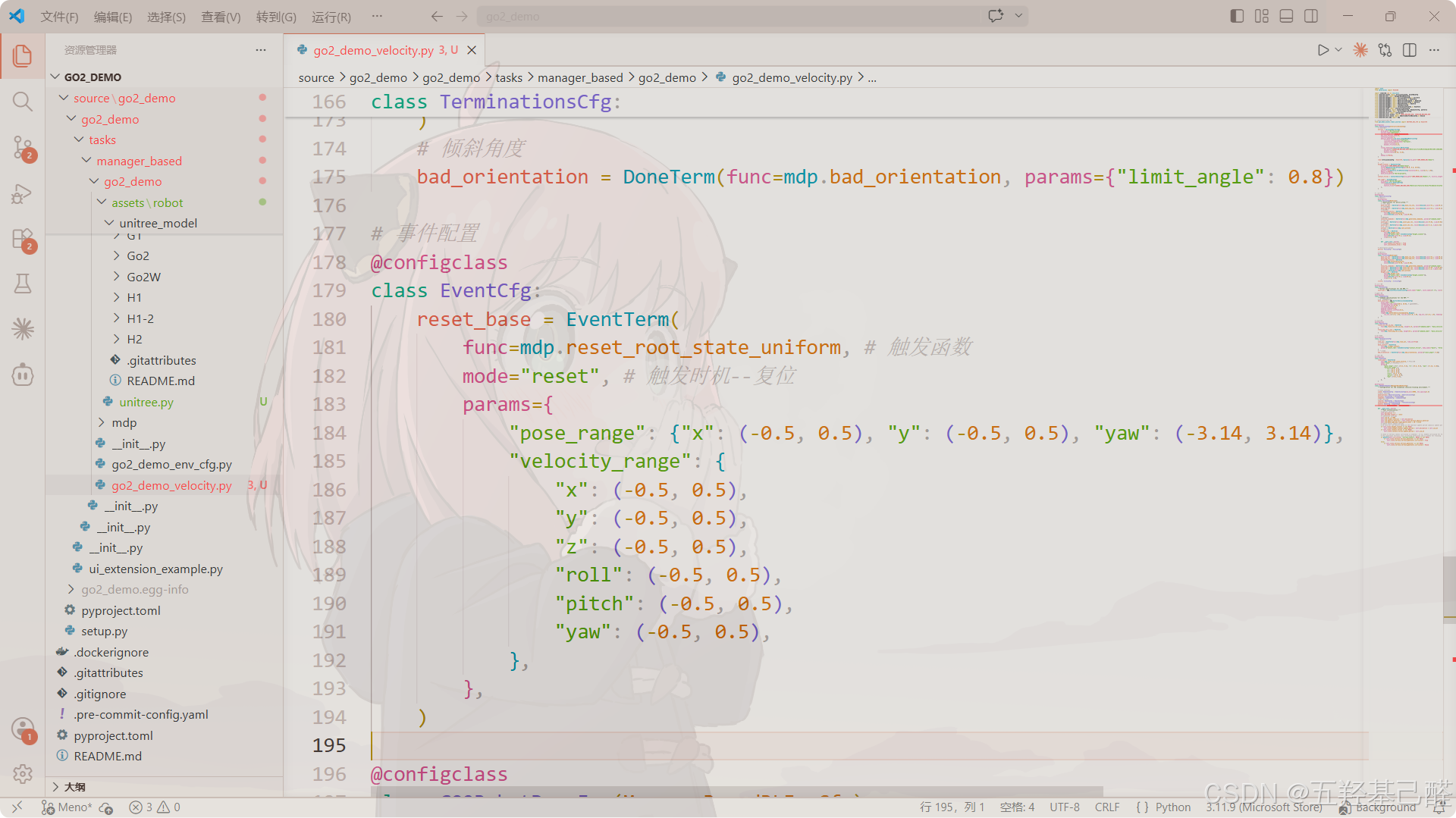
事件配置类events
配置域随机化、初始状态扰动等事件,增强策略鲁棒性。
python
# 事件配置
@configclass
class EventCfg:
reset_base = EventTerm(
func=mdp.reset_root_state_uniform, # 触发函数
mode="reset", # 触发时机--复位
params={
"pose_range": {"x": (-0.5, 0.5), "y": (-0.5, 0.5), "yaw": (-3.14, 3.14)},
"velocity_range": {
"x": (-0.0, 0.0),
"y": (-0.0, 0.0),
"z": (-0.0, 0.0),
"roll": (-0.0, 0.0),
"pitch": (-0.0, 0.0),
"yaw": (-0.0, 0.0),
},
},
)
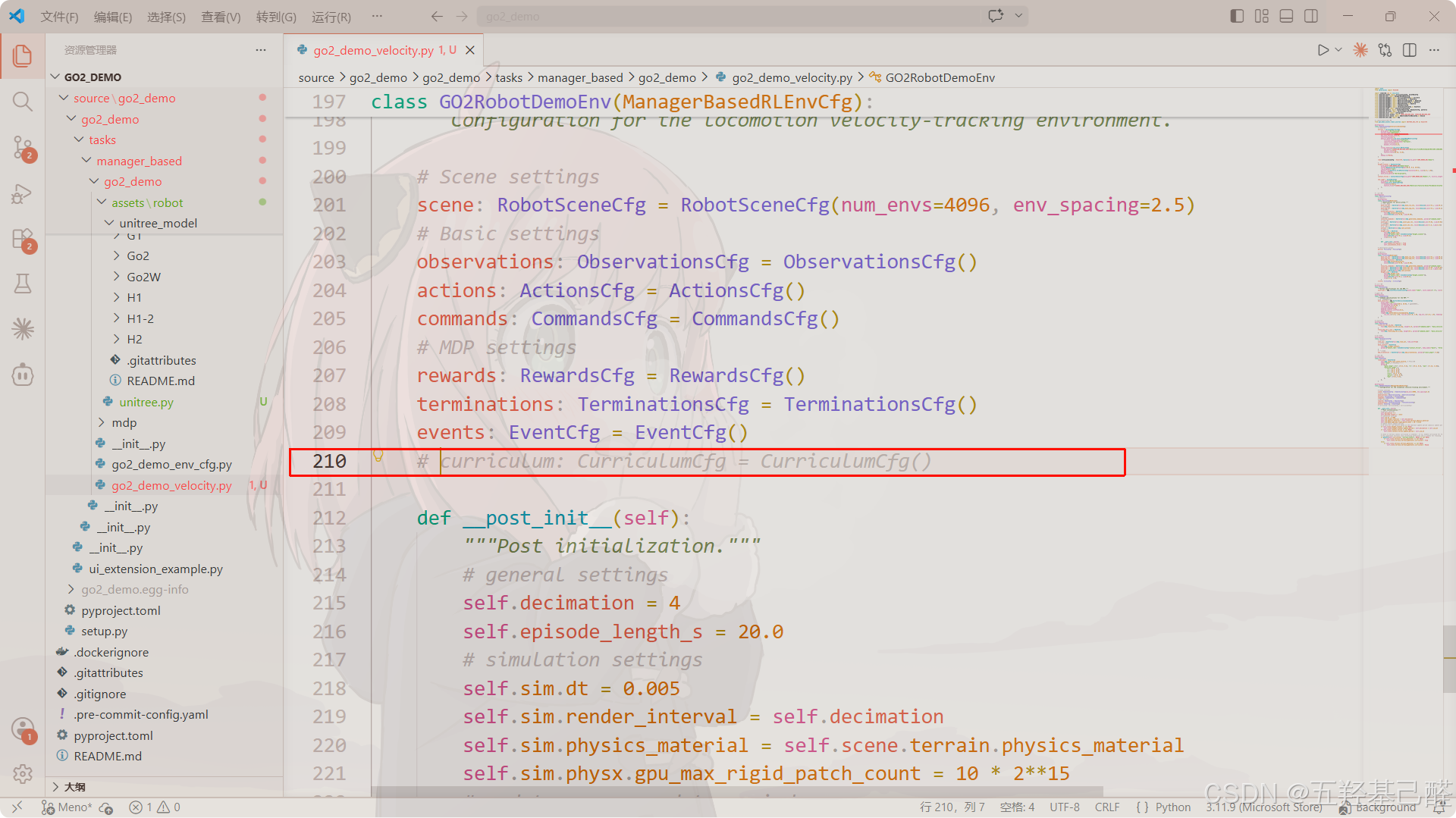
课程学习配置类 curriculum
据智能体当前表现动态调整任务难度(如地形等级),实现渐进式训练以加速策略收敛。
本次暂不对其进行配置,因此注释:
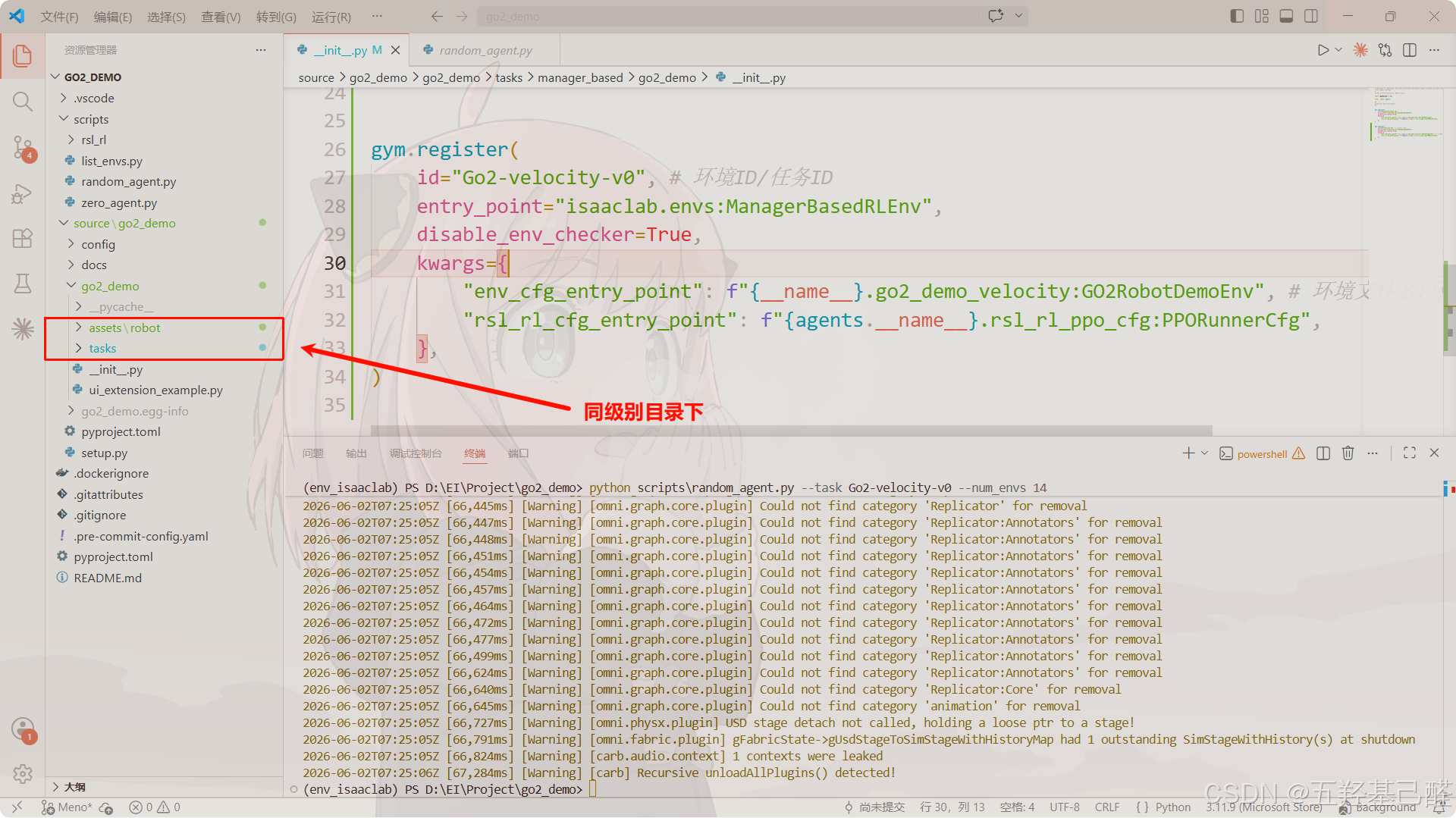
注册Gym环境
复制__init__.py文件中的注册部分代码:
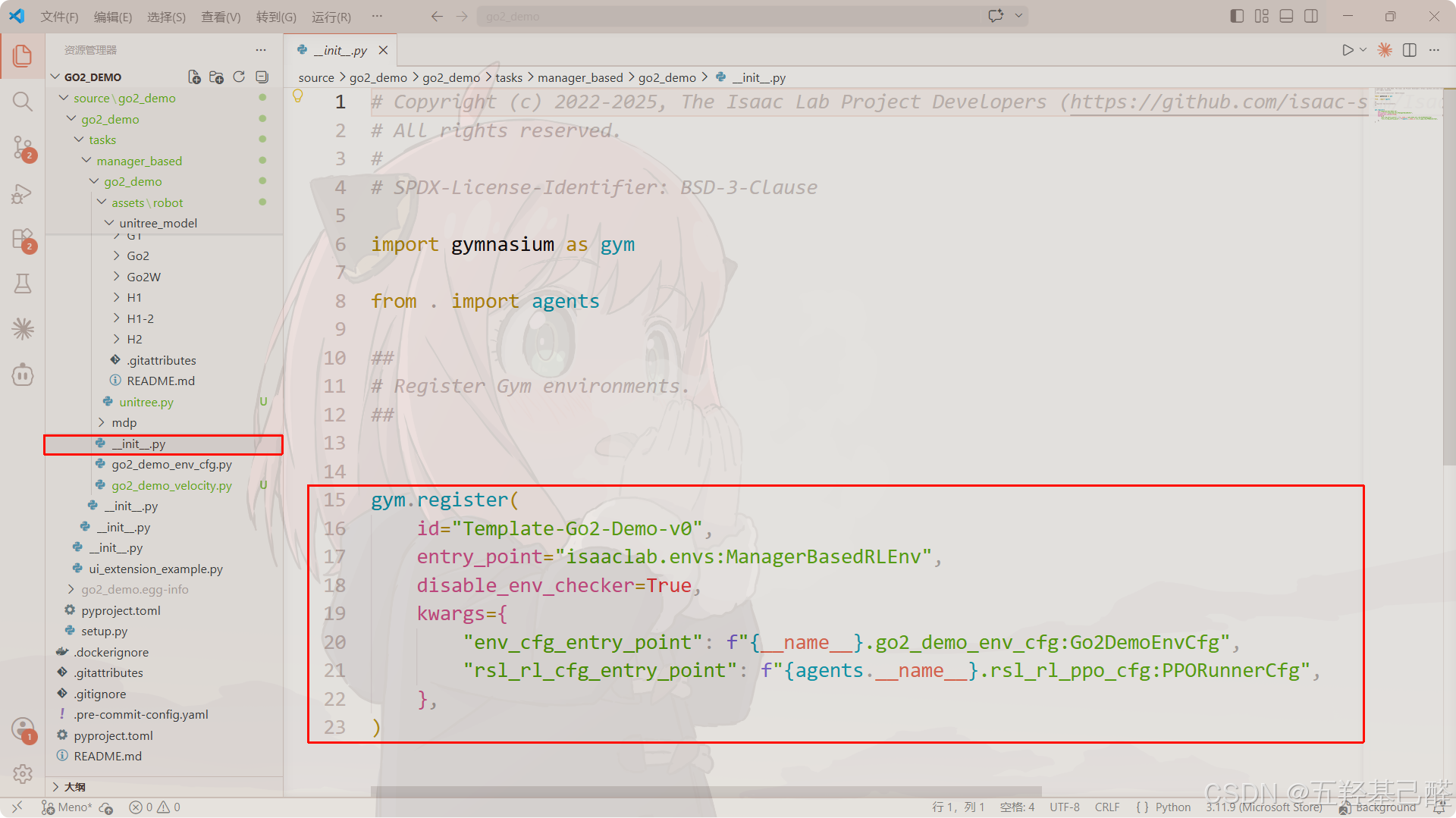
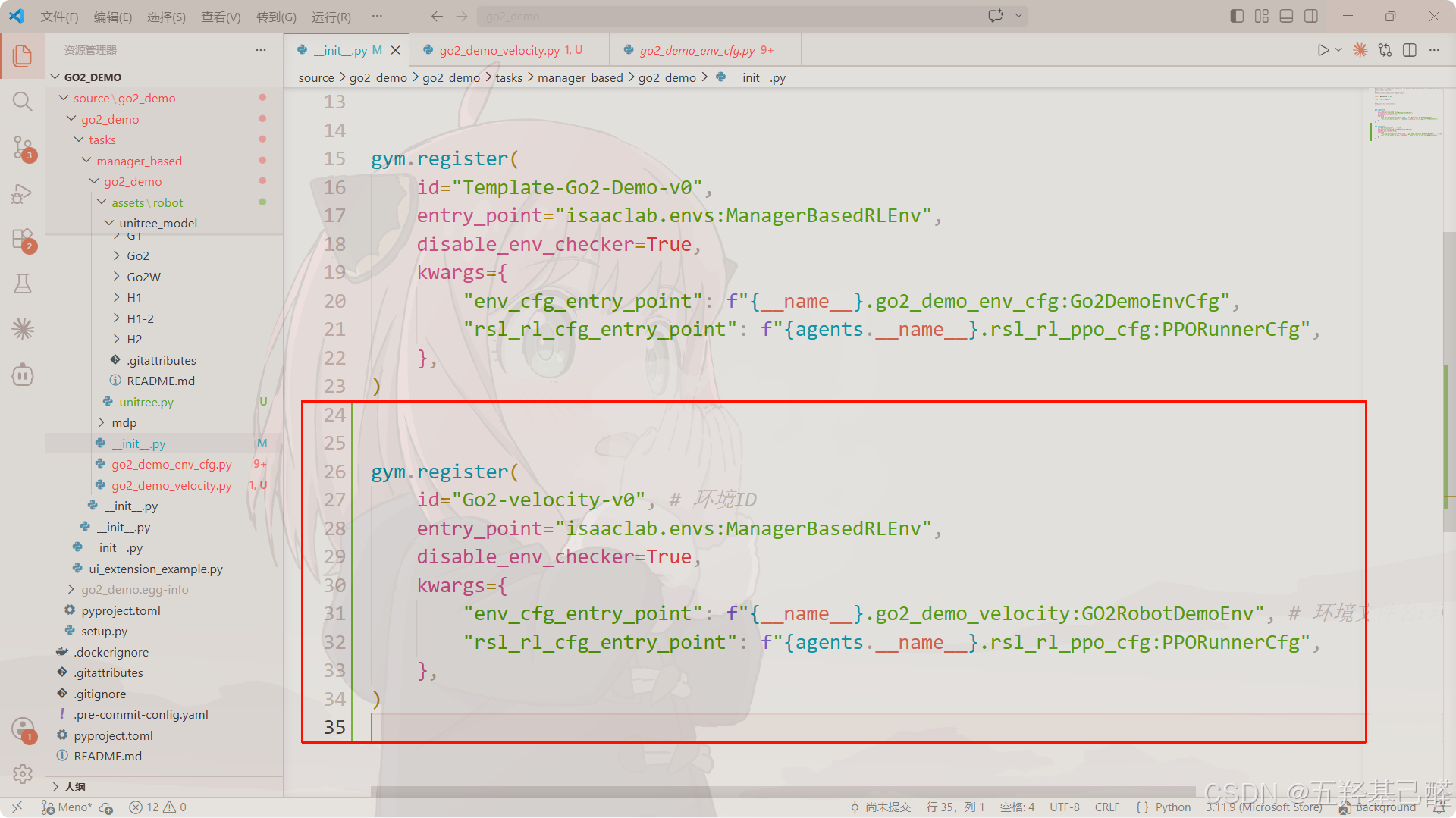
修改如下:
python
gym.register(
id="Go2-velocity-v0", # 环境ID
entry_point="isaaclab.envs:ManagerBasedRLEnv",
disable_env_checker=True,
kwargs={
"env_cfg_entry_point": f"{__name__}.go2_demo_velocity:GO2RobotDemoEnv", # 环境文件名:环境类名
"rsl_rl_cfg_entry_point": f"{agents.__name__}.rsl_rl_ppo_cfg:PPORunnerCfg",
},
)
调整PPO网络
文件位置在agents/rsl_rl_ppo_cfg.py
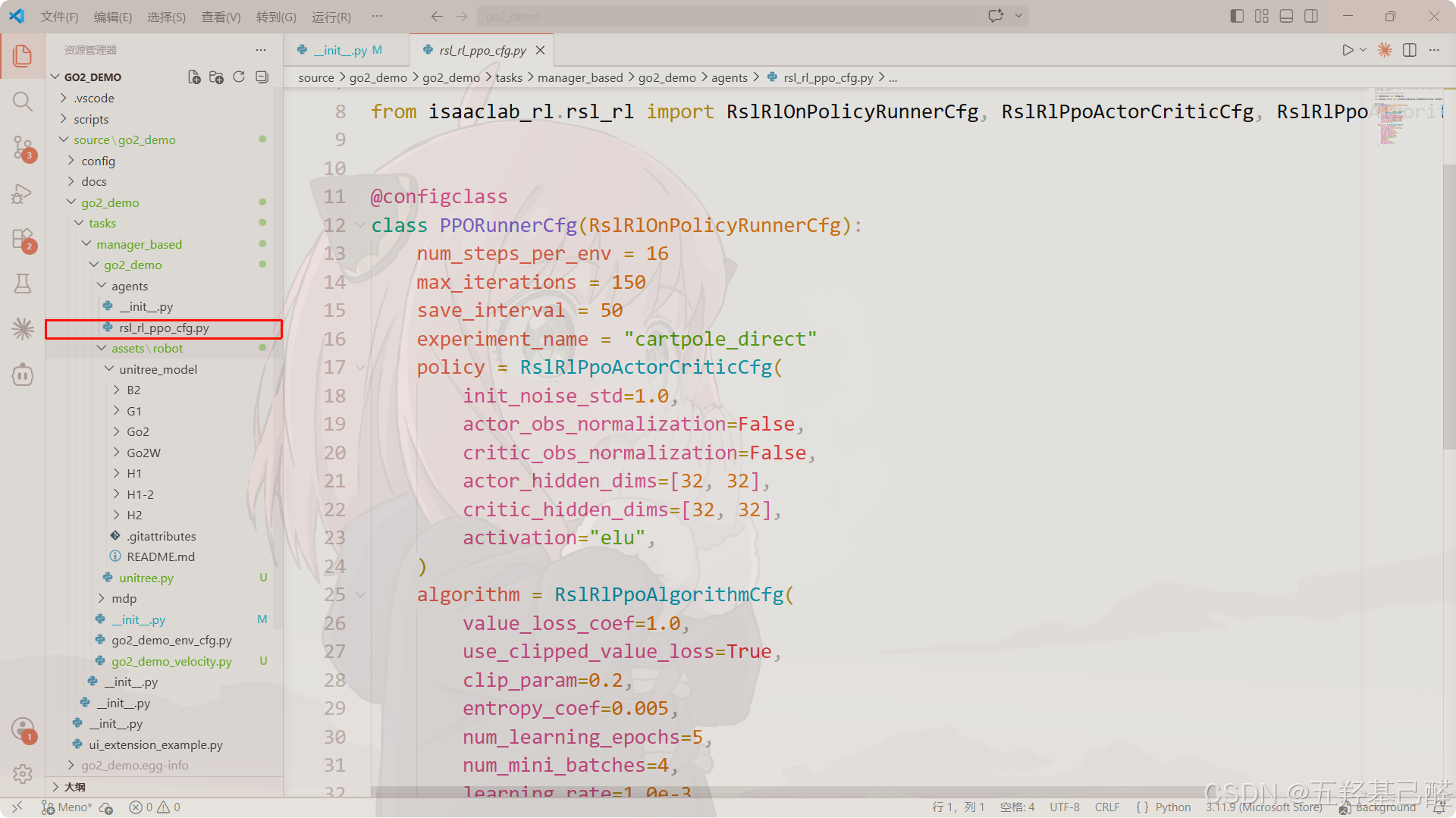
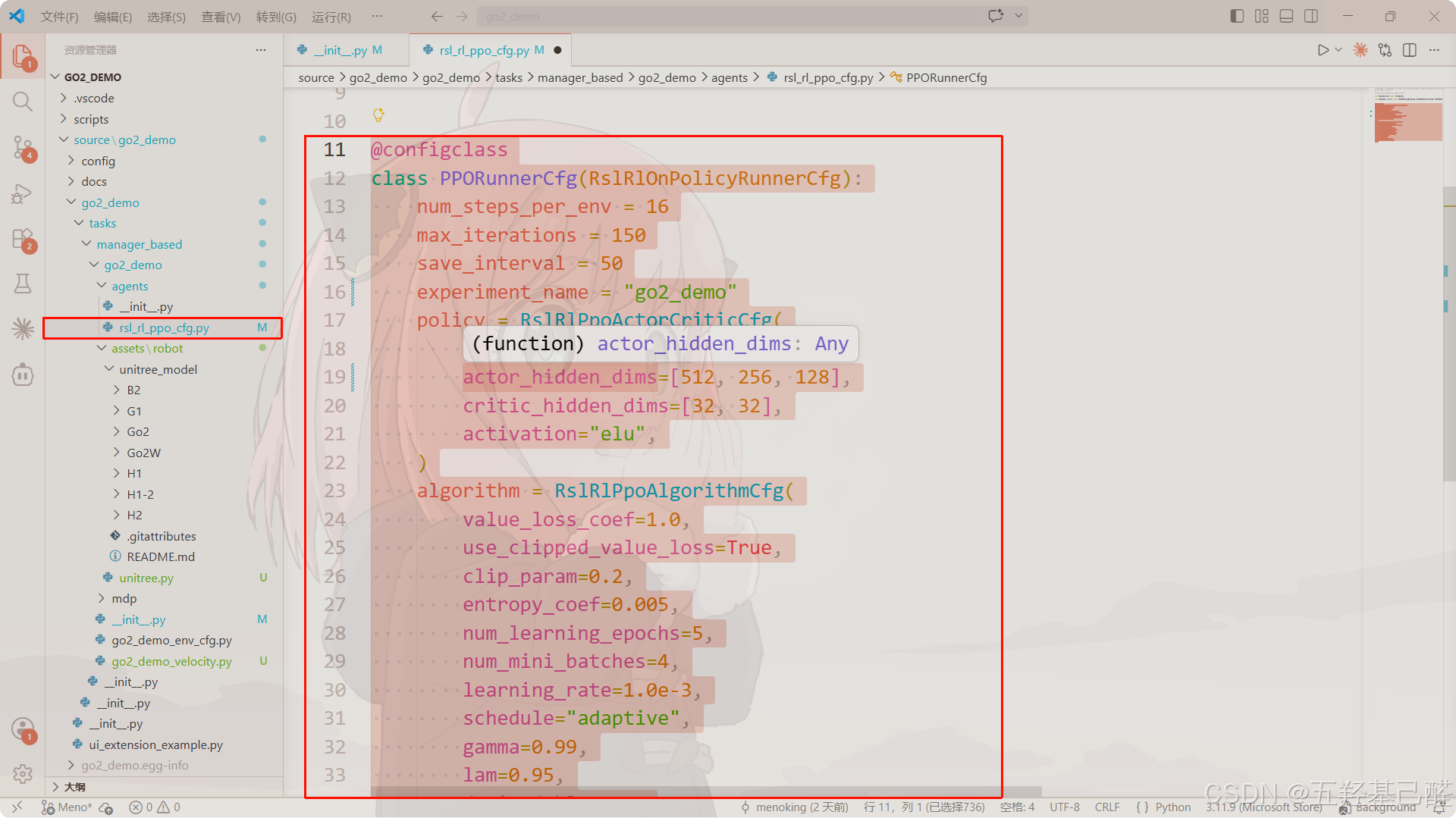
调整至以下:
python
@configclass
class PPORunnerCfg(RslRlOnPolicyRunnerCfg):
num_steps_per_env = 124
max_iterations = 50000
save_interval = 100
experiment_name = "go2_demo"
policy = RslRlPpoActorCriticCfg(
init_noise_std=1.0,
actor_hidden_dims=[512, 256, 128],
critic_hidden_dims=[32, 32],
activation="elu",
)
algorithm = RslRlPpoAlgorithmCfg(
value_loss_coef=1.0,
use_clipped_value_loss=True,
clip_param=0.2,
entropy_coef=0.005,
num_learning_epochs=5,
num_mini_batches=4,
learning_rate=1.0e-3,
schedule="adaptive",
gamma=0.99,
lam=0.95,
desired_kl=0.01,
max_grad_norm=1.0,
)
三.验证与训练
验证环境
random_agent.py
在conda环境下运行:
bash
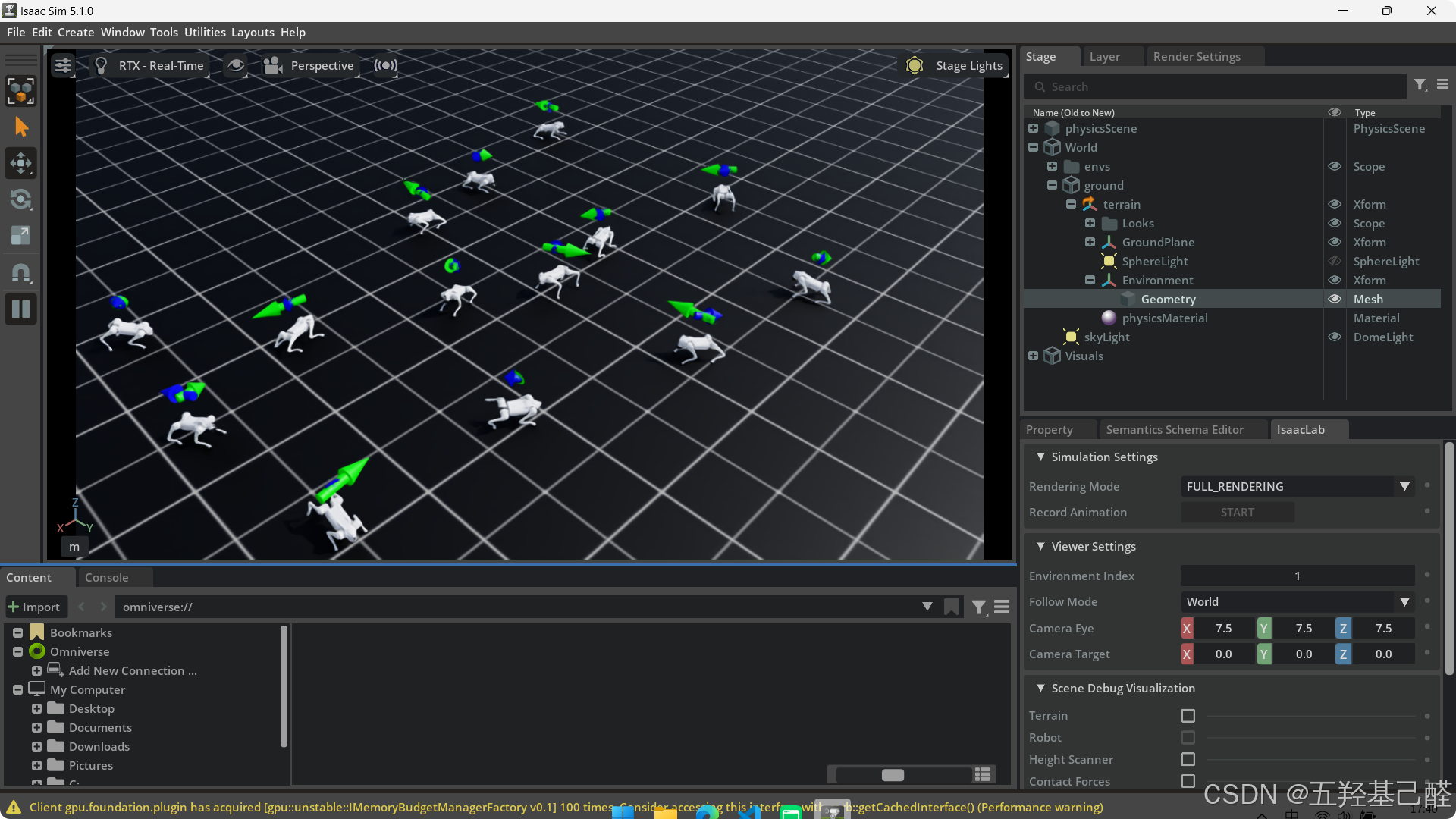
python scripts\random_agent.py --task Go2-velocity-v0 --num_envs 14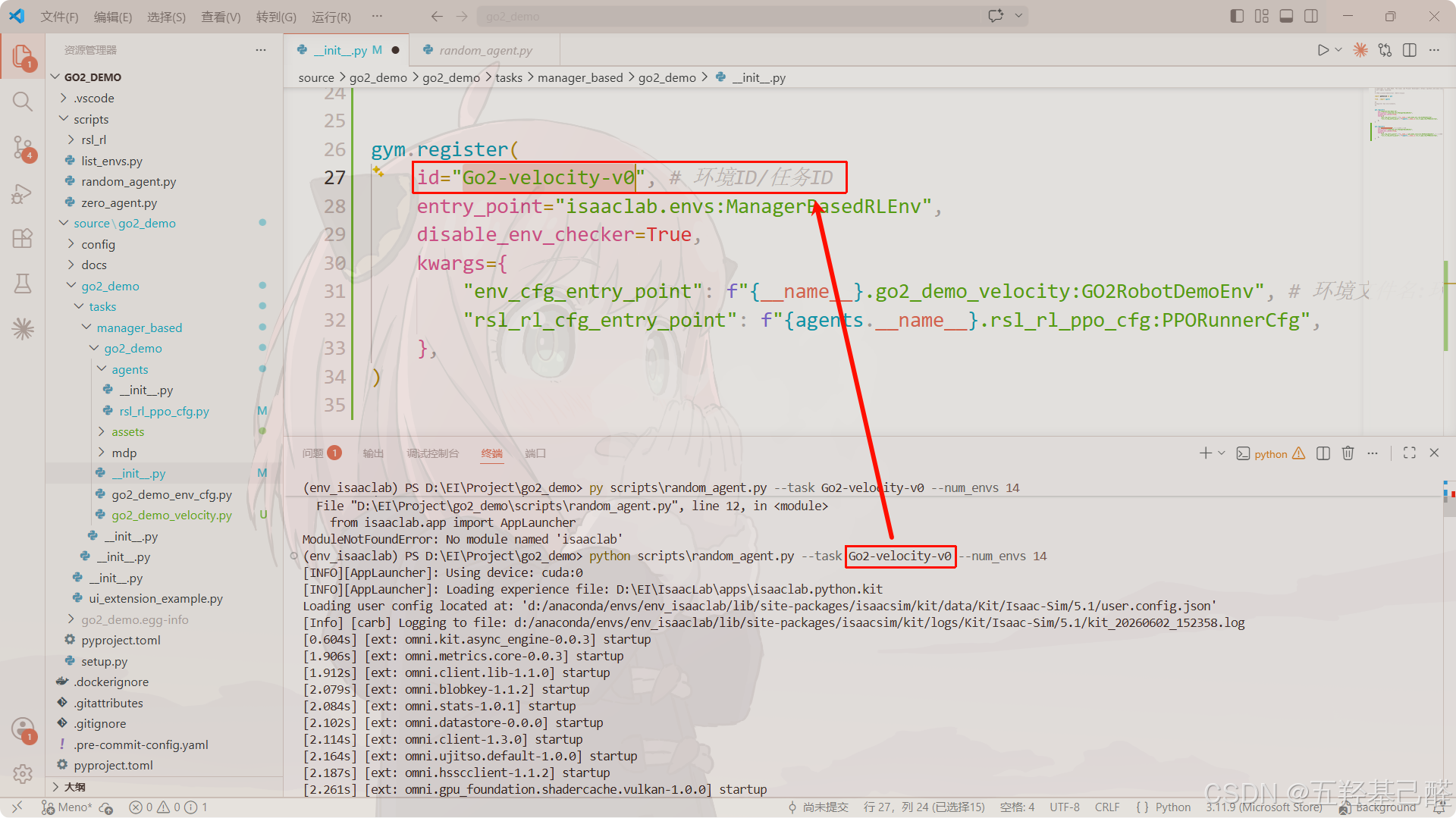
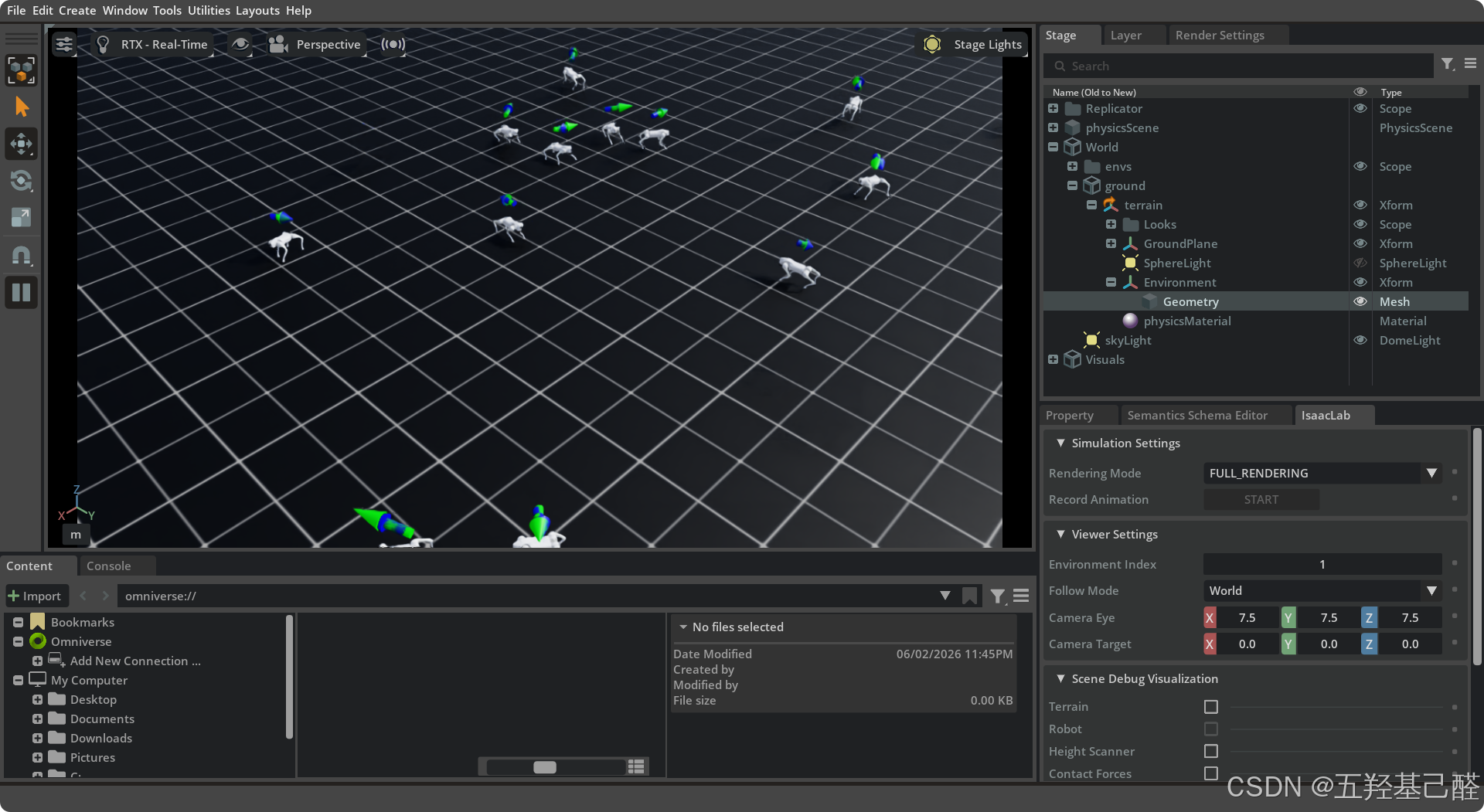
跑通后机器人开始运动,如下:
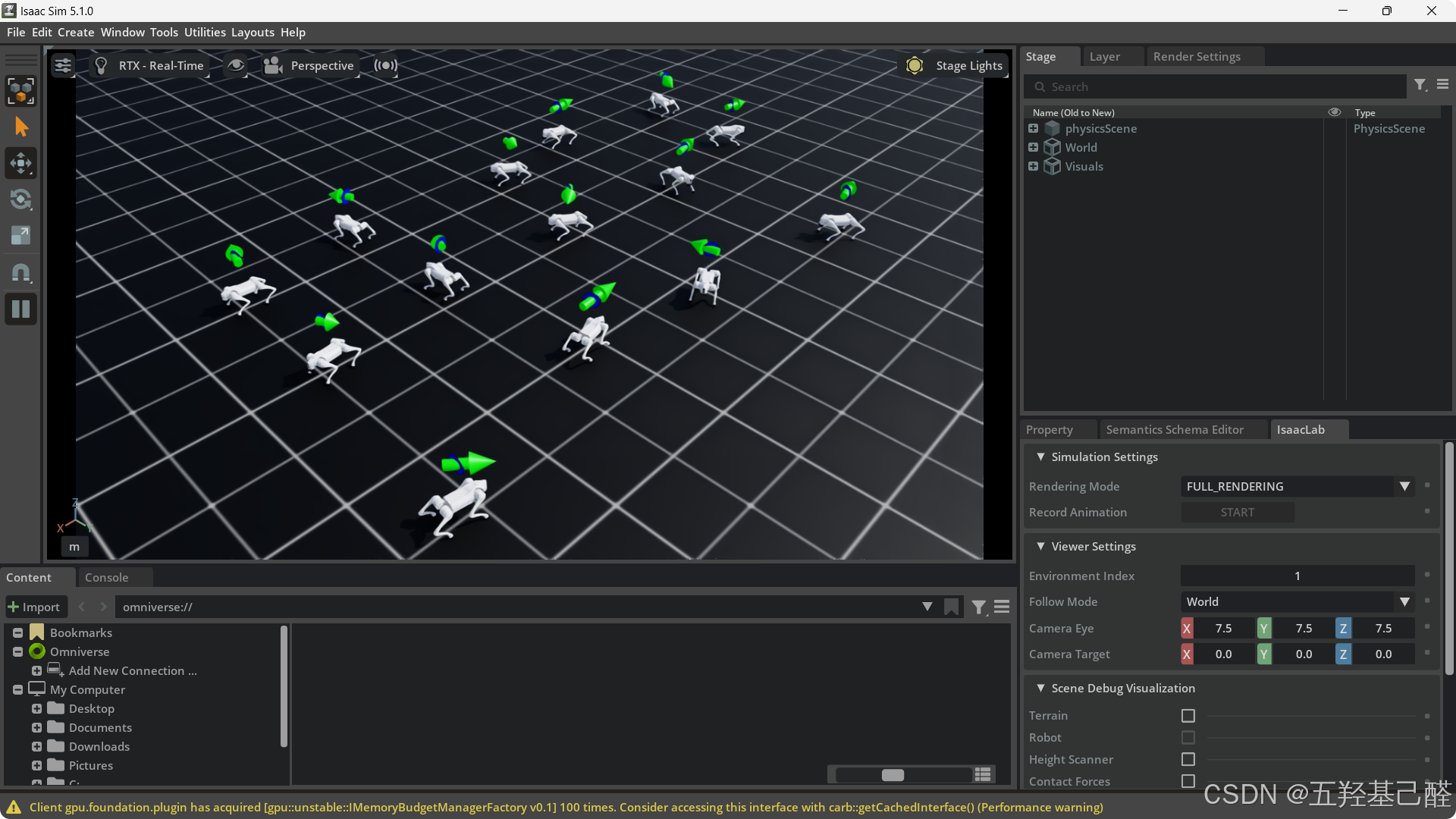
zero_agent.py
python
python scripts\zero_agent.py --task Go2-velocity-v0 --num_envs 14由于跑的是zero_agent.py,是跑通后机器狗是静止状态:
正式训练
无窗口渲染训练:
bash
python scripts\rsl_rl\train.py --task Go2-velocity-v0 --num_envs=400 --max_iterations 1000 --headless耐心等待训练:
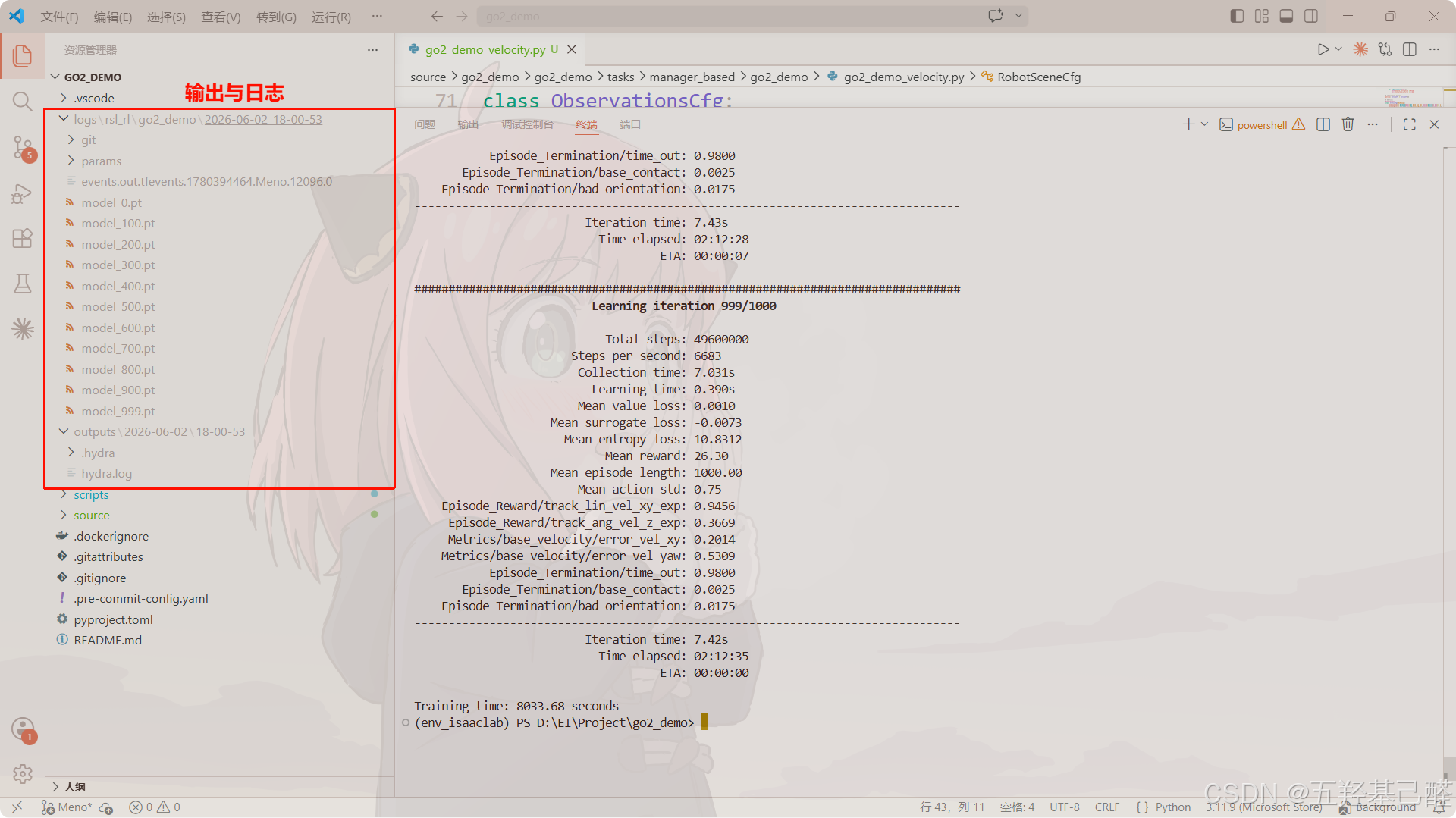
参数可视化
TensorBoard查看训练曲线:
bash
tensorboard --logdir logs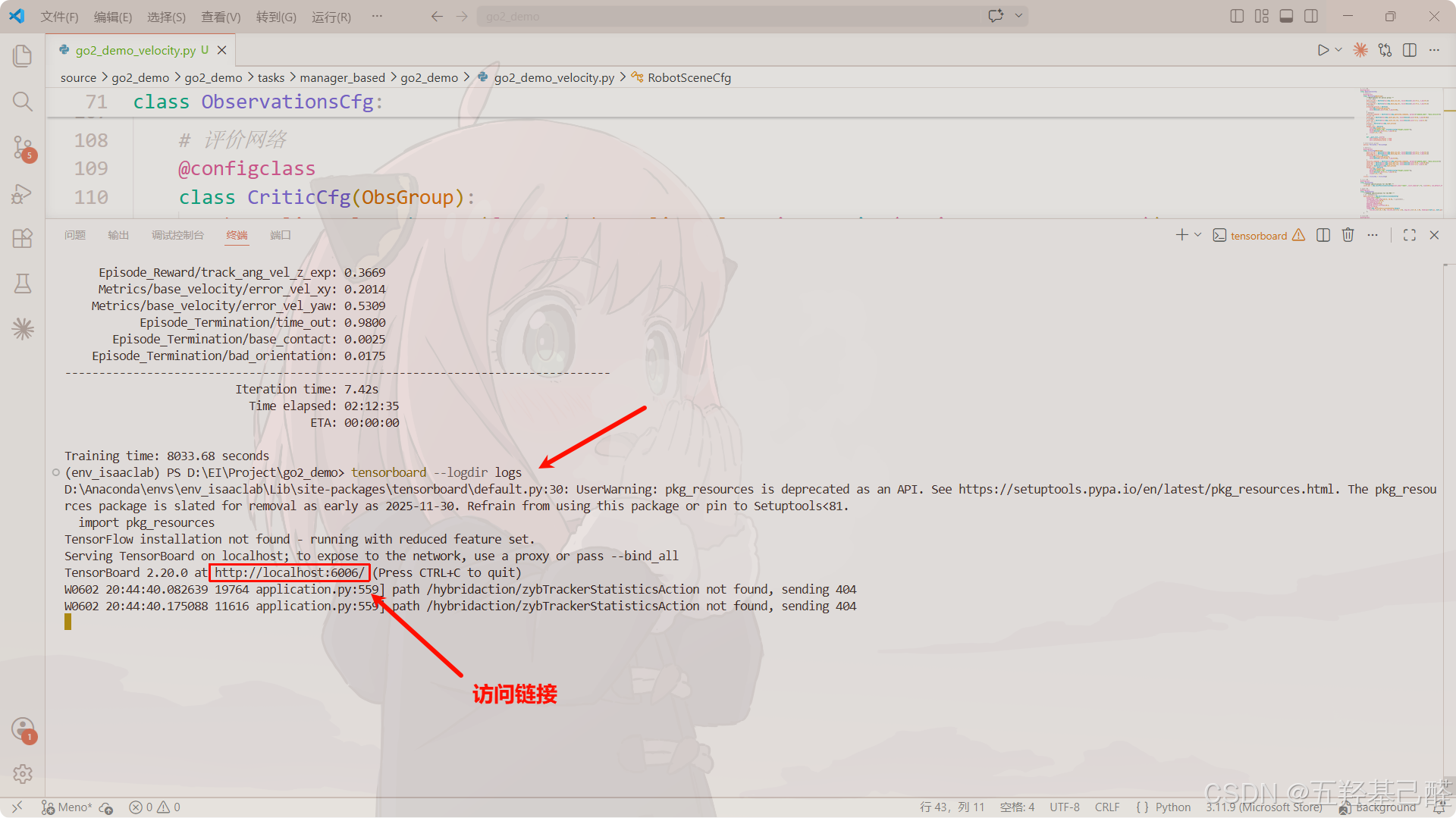
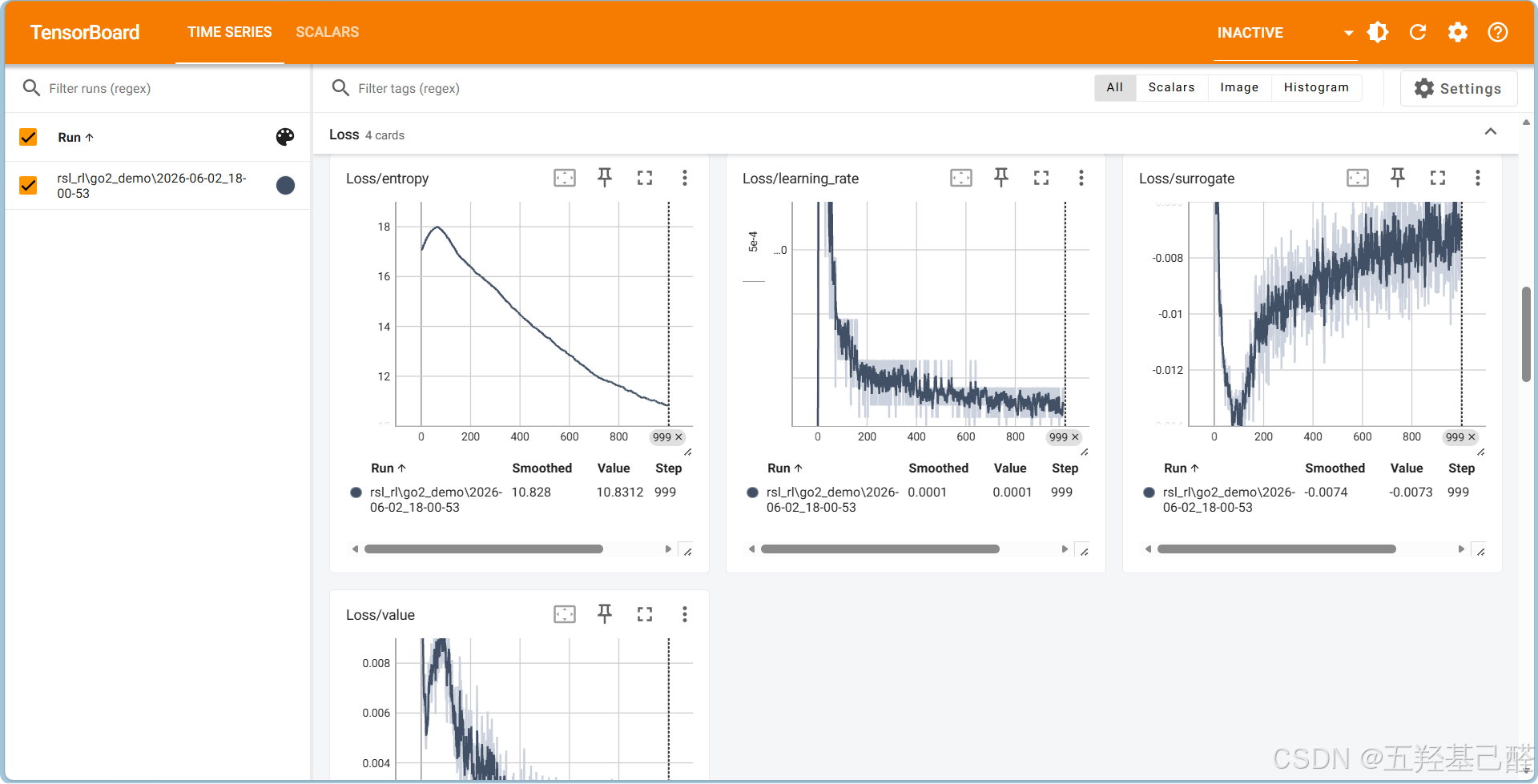
访问链接后可以观察到各种参数曲线:
评估策略
运行下列命令, 观察训练的最终模型的效果并保存模型权重文件:
bash
python scripts\rsl_rl\play.py --task Go2-velocity-v0 --num_envs 16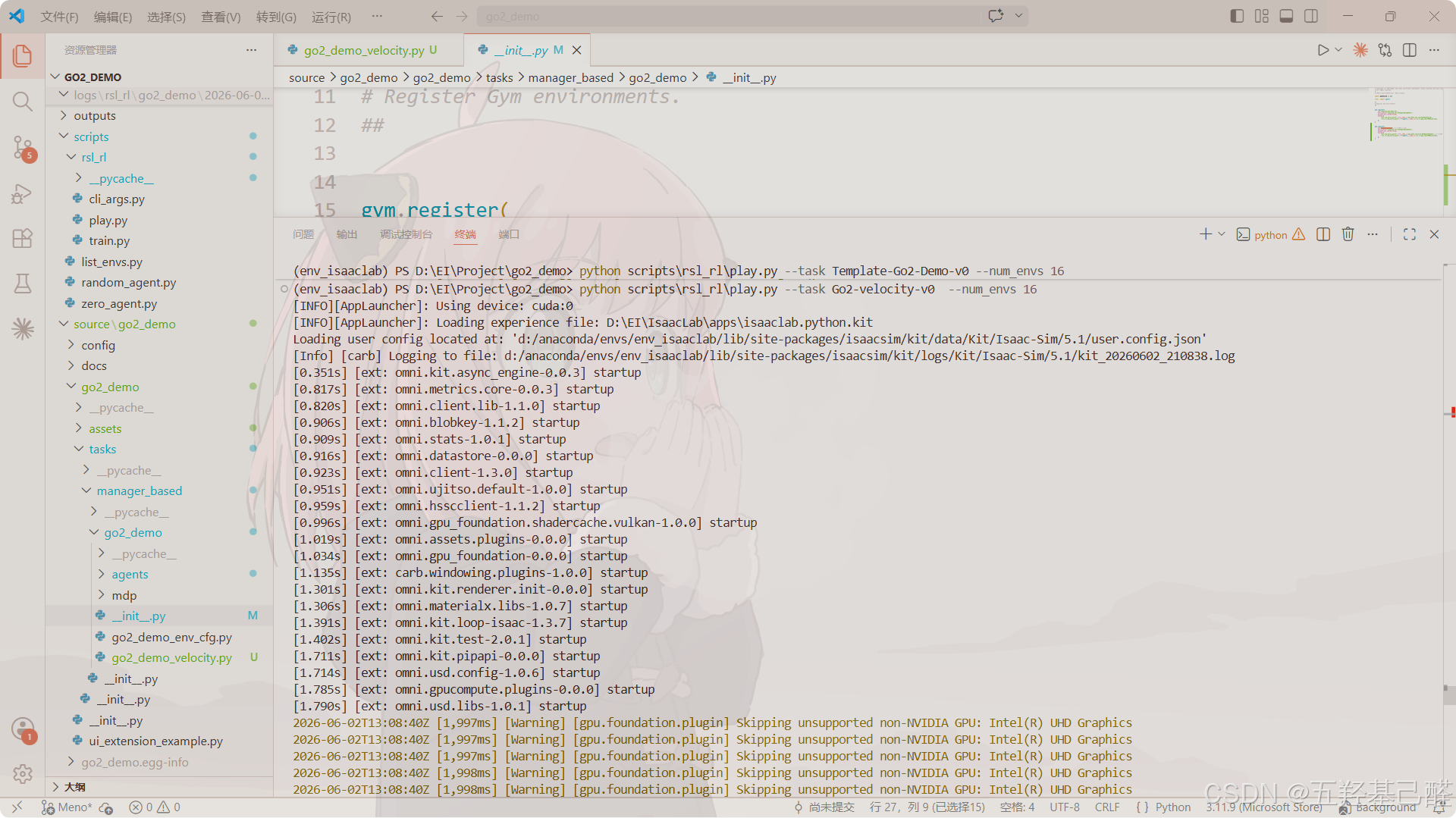
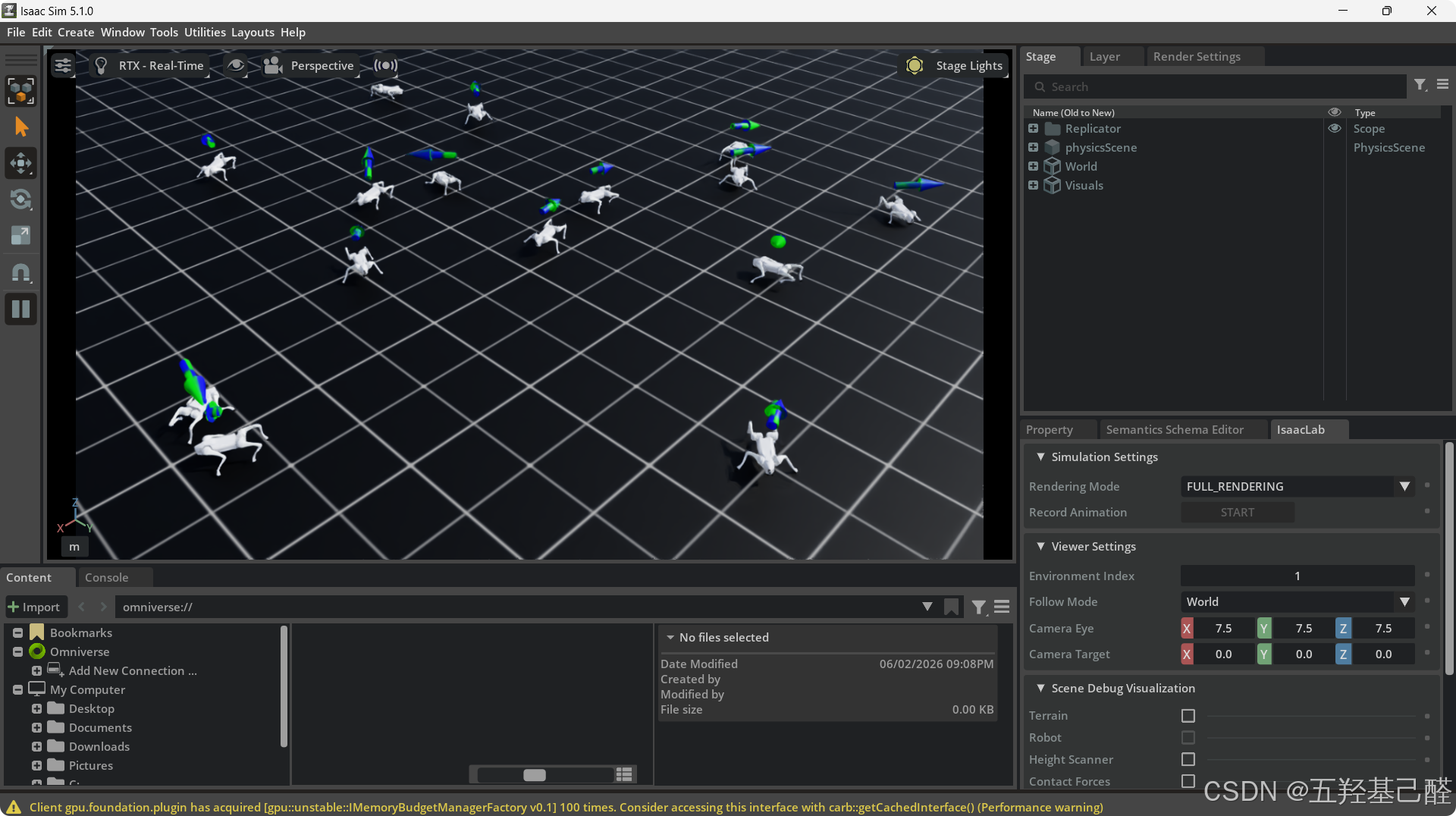
可以在仿真器中观察到四足机器人的行走姿态效果不太好:
四.优化策略
主要针对奖励函数作优化,这里将速度追踪权重调大,并添加了几个约束惩罚项:
python
# 奖励函数
@configclass
class RewardsCfg:
# 线速度追踪
track_lin_vel_xy_exp = RewTerm(
func=mdp.track_lin_vel_xy_exp, weight=3.0, params={"command_name": "base_velocity", "std": math.sqrt(0.25)}
)
# 角速度追踪
track_ang_vel_z_exp = RewTerm(
func=mdp.track_ang_vel_z_exp, weight=1.5, params={"command_name": "base_velocity", "std": math.sqrt(0.25)}
)
# 约束姿态
flat_orientation_l2 = RewTerm(func=mdp.flat_orientation_l2, weight=-2.5)
# 限制某些部位不着地
undesired_contacts = RewTerm(
func=mdp.undesired_contacts,
weight=-1.0,
params={"sensor_cfg": SceneEntityCfg("contact_forces", body_names=["Head_.*", ".*_hip", ".*thigh", ".*_calf"]), "threshold": 1.0},
)
# 惩罚关节速度
joint_vel = RewTerm(func=mdp.joint_vel_l2, weight=-0.001)
# 惩罚关节加速度
joint_acc = RewTerm(func=mdp.joint_acc_l2, weight=-2.5e-7)
# 惩罚输出力矩过大
joint_torques = RewTerm(func=mdp.joint_torques_l2, weight=-2e-4)
# 惩罚相邻时刻动作变化过大
action_rate = RewTerm(func=mdp.action_rate_l2, weight=-0.1)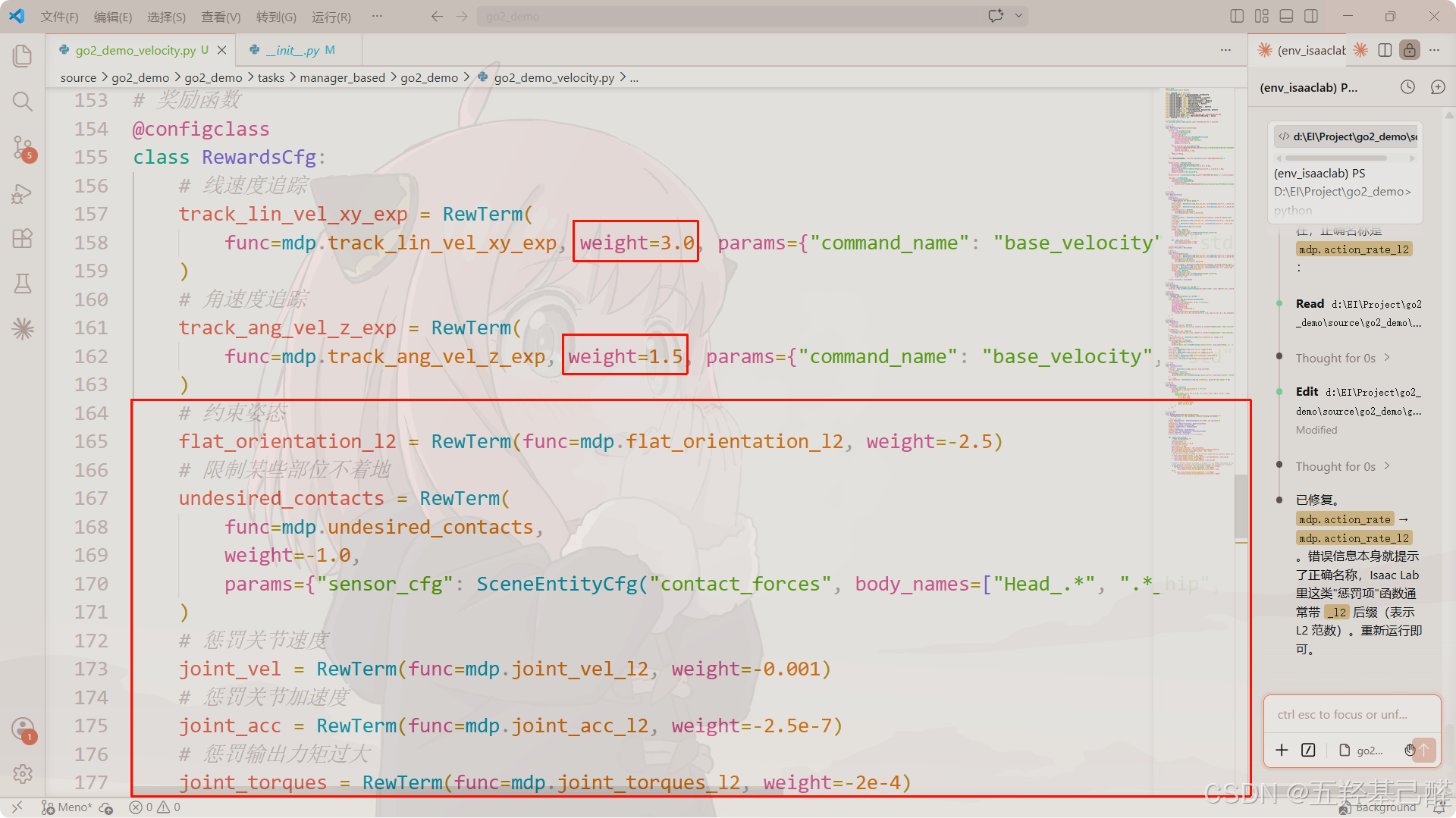
重新训练后再评估,发现四足机器人姿态好了很多:
五.总结
再次感谢哔哩哔哩@猫猫烤肉师傅的免费教程:【从 Isaac 到 MuJoCo:机器人sim2sim实战】Lesson0 糖猫碎碎念环节_哔哩哔哩_bilibili
笔者跟随猫老师的教程走了一遍IsaacLab中的机器人仿真训练流程,并将猫老师未放出的代码、概念等补充在贴中,对视频中的细节做了补充。
如有错误,欢迎指正。