第04章:神经网络的学习
本笔记整理自《深度学习入门:基于 Python 的理论与实现》(鱼书),包含学习笔记与代码示例。
源码仓库
- GitHub: https://github.com/2Anblo/deep-learning-from-scratch
- Gitee: https://gitee.com/zb4r/deep-learning-from-scratch
本章开始进入神经网络最核心的内容之一------学习。
这里的"学习",指的是:
- 利用训练数据
- 自动调整权重参数
- 让神经网络的预测越来越准确
在前面的章节中,我们一直是在"使用"已经设定好的权重进行前向传播,而这一章开始,我们要研究:
如何让神经网络自己找到这些权重为了衡量神经网络预测得好不好,本章会引入:
- 损失函数(Loss Function)
- 梯度(Gradient)
- 梯度下降法(Gradient Descent)
神经网络学习的目标,本质上就是:
找到能让损失函数最小的参数而梯度法,则是寻找这个最优参数的重要方法。
4.1 从数据中学习
神经网络最大的特点之一,就是:
参数可以通过数据自动学习这和之前感知机中"手动设置权重"完全不同。
在第2章里:
- AND
- OR
- NAND
这些逻辑门的参数,都是我们根据真值表人工设计的。
但现实中的神经网络:
- 参数数量可能有几十万
- 甚至上亿
例如:
W1.shape = (784, 100)
W2.shape = (100, 200)
W3.shape = (200, 10)仅仅几个矩阵,就已经包含大量参数。
因此:
人工调参数是不现实的所以必须让神经网络:
根据训练数据自动优化参数这就是"学习"。
本章后面会使用:
MNIST 手写数字数据集真正实现:
- 参数学习
- 损失计算
- 梯度更新
从而让神经网络逐渐学会识别数字。
补充:
第2章的感知机其实也可以"学习"。
根据:
感知机收敛定理对于:
线性可分问题感知机可以通过有限次学习找到正确参数。
但是:
非线性可分问题例如 XOR:
单层感知机无法自动学习解决而神经网络:
- 通过多层结构
- 非线性激活函数
能够学习更加复杂的问题。
4.1.1 数据驱动
机器学习最核心的东西其实就是:
数据没有数据,机器学习几乎什么都做不了。
传统编程里,人通常会自己设计规则:
- 遇到什么情况怎么办
- 哪些特征重要
- 应该如何判断
本质上是:
人写规则 → 程序执行规则但机器学习反过来了:
给机器大量数据 → 机器自己找规律这就是"数据驱动"。
书里举了一个经典例子:
识别手写数字 5看起来很简单,因为人一眼就能认出来。
但如果真让我们写程序:
到底怎样才算"5"?其实非常难描述。
因为不同人的写法差异特别大:
- 有人写得圆
- 有人写得瘦
- 有人连笔
- 有人倾斜
图4-1里就能明显看出来:
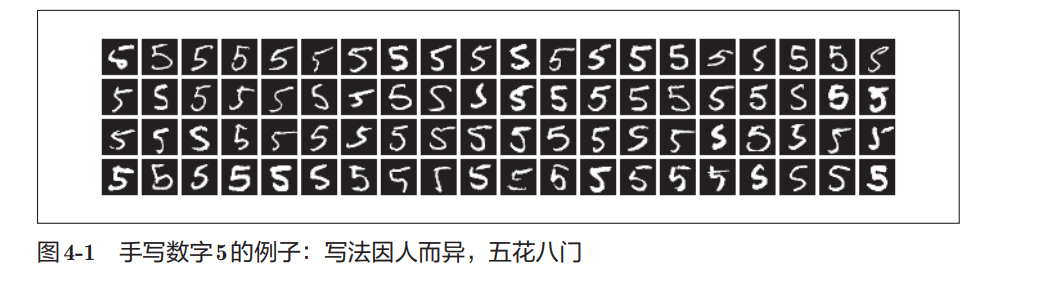
同样都是 5,但长得五花八门所以:
人能直觉识别
≠
人能准确总结规则这也是传统人工规则方法的困难所在。
早期机器学习的一种典型思路是:
先人工提取"特征"
再让机器学习这些特征例如图像处理中,人们会设计:
- SIFT
- SURF
- HOG
这些"特征量"。
本质上是:
人先告诉机器:
"图像里什么信息重要"然后再交给:
- SVM
- KNN
等算法分类。
也就是说:
机器负责学习
但"看什么"仍然由人决定而神经网络(深度学习)最大的不同在于:
连特征也自己学习它直接输入原始图像:
像素 → 神经网络 → 输出结果中间不需要人工设计特征。
所以图4-2里:
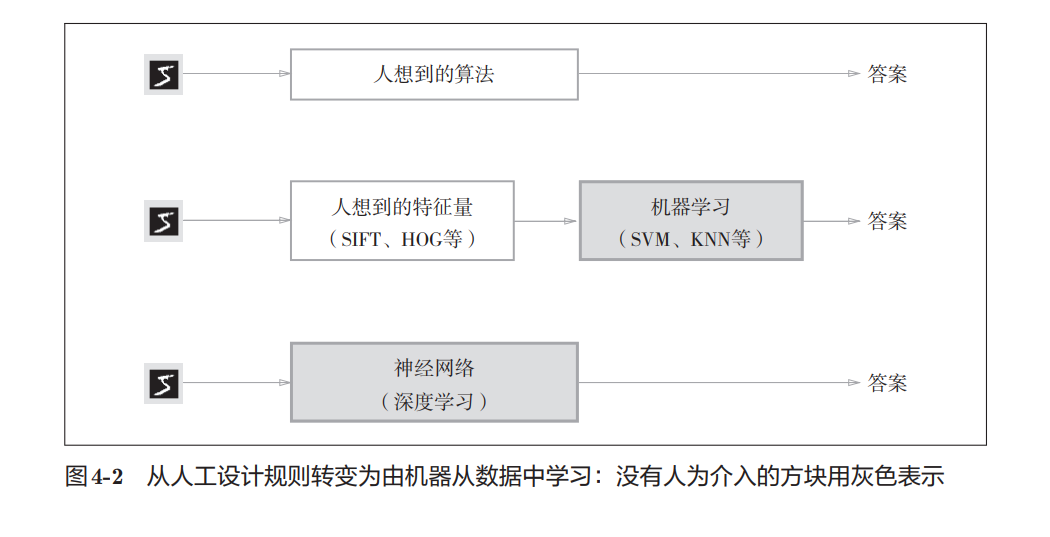
- 灰色部分表示"机器自动完成"
- 神经网络那一行几乎全部是灰色
意味着:
人为干预更少传统方法:
图像
→ 人工特征
→ 机器学习
→ 结果深度学习:
图像
→ 神经网络自动学习
→ 结果这也是:
端到端(End-to-End)学习的含义。
所谓"端到端":
从原始输入
直接得到最终输出中间不需要人为拆步骤。
神经网络还有一个很大的优势:
同一套流程
可以解决很多不同问题比如:
- 识别数字
- 识别猫狗
- 人脸识别
- 语音识别
传统方法往往都要:
重新设计特征但神经网络通常只需要:
换数据继续训练即可。
4.1.2 训练数据和测试数据
在机器学习中,数据通常不会直接全部拿来训练,而是会分成两部分:
- 训练数据(Training Data)
- 测试数据(Test Data)
其中:
- 训练数据用于让模型学习规律、调整参数
- 测试数据用于检验模型真正的效果
这样做的核心目的,是为了验证模型有没有"泛化能力"。
这里的"泛化能力",可以理解成:
模型是否能处理从来没见过的新数据。
机器学习真正追求的,并不是"把训练集背下来",而是能够举一反三。
比如手写数字识别:
训练时,模型可能看过很多人的数字"8"。
但实际应用时,系统面对的是:
- 没见过的人
- 没见过的字迹
- 不同风格的数字
如果模型依然能正确识别,就说明它具备较好的泛化能力。
否则,就可能只是死记硬背了训练数据里的写法。
因此,只使用同一批数据来:
- 训练模型
- 再评价模型
其实是不可靠的。
因为模型很可能只是"记住了答案"。
这种现象叫作:
过拟合(Overfitting)也就是:
模型在训练数据上表现很好,但面对新数据时效果很差。
避免过拟合,是机器学习中的一个重要问题。
4.2 损失函数
在神经网络学习过程中,模型需要一个"标准"来判断自己当前表现得怎么样。
这个标准,就是:
损失函数(Loss Function)可以把它理解成:
神经网络当前"犯错的程度"。
损失函数会用一个数值来表示模型预测结果和真实答案之间的差距。
- 差距越大
→ 损失越大 - 差距越小
→ 损失越小
而神经网络训练的目标,其实就是:
不断调整参数,让损失函数尽可能变小。
书里用了"幸福指数"来举例,其实很好理解。
正常人描述幸福时,可能只会说:
- "还不错"
- "一般般"
- "挺开心"
但如果能给幸福程度打分,比如:
幸福指数 = 10.23那就能更精确地比较不同状态。
神经网络也是类似的。
它不会简单地判断:
- "预测得还行"
- "预测得不好"
而是会通过损失函数,把当前错误程度转换成一个具体数值。
这样模型才能知道:
- 现在效果怎么样
- 参数调整后有没有变好
- 应该往哪个方向优化
这里有一个容易混淆的点:
损失函数衡量的是"坏的程度"。
也就是说:
- 损失越大
→ 模型越差 - 损失越小
→ 模型越好
因此,训练的目标通常写成:
最小化损失函数本质上等价于:
最大化模型性能只是数学上更习惯使用"最小化错误"这种表达方式。
实际中,损失函数可以自由设计。
但神经网络里最常见的有两种:
- 均方误差(Mean Squared Error)
- 交叉熵误差(Cross Entropy Error)
后面会重点介绍这两种损失函数。
4.2.1 均方误差
均方误差(Mean Squared Error,MSE)是最经典的损失函数之一。
它的作用很简单:
计算"预测结果"和"真实答案"之间到底差了多少。
公式如下:
E = 1 2 ∑ k ( y k − t k ) 2 E=\frac{1}{2}\sum_{k}(y_k-t_k)^2 E=21k∑(yk−tk)2
其中:
y_k
表示神经网络的输出t_k
表示真实标签(监督数据)k
表示第k个元素
整个公式的流程其实就是:
- 预测值减去真实值
- 对误差平方
- 全部加起来
因为用了平方:
- 误差越大,惩罚越明显
- 正负误差不会互相抵消
前面的 1/2 主要是为了后面求导方便,对结果本质影响不大。
在手写数字识别中,输出层通常有 10 个神经元,对应数字:
python
0 ~ 9例如:
python
y = [0.1, 0.05, 0.6, 0.0, 0.05, 0.1, 0.0, 0.1, 0.0, 0.0]这里表示模型认为:
- 是"0"的概率:0.1
- 是"1"的概率:0.05
- 是"2"的概率:0.6
- ...
其中概率最大的"2",说明模型最倾向于认为答案是数字 2。
而监督数据 t:
python
t = [0, 0, 1, 0, 0, 0, 0, 0, 0, 0]这里正确答案是"2"。
因为只有索引为 2 的位置是 1。
这种表示方法叫:
python
One-Hot 表示特点是:
- 正确标签位置为
1 - 其他位置全部为
0
均方误差的 Python 实现非常直接:
python
def mean_squared_error(y, t):
return 0.5 * np.sum((y - t) ** 2)这里:
python
(y - t) ** 2表示:
- 先计算误差
- 再逐元素平方
然后:
python
np.sum()把所有误差加起来。
书里给了两个例子。
第一个例子:
python
y = [0.1, 0.05, 0.6, 0.0, 0.05, 0.1, 0.0, 0.1, 0.0, 0.0]模型认为"2"的概率最高。
而正确答案也正好是"2"。
因此损失较小:
python
0.0975第二个例子:
python
y = [0.1, 0.05, 0.1, 0.0, 0.05, 0.1, 0.0, 0.6, 0.0, 0.0]这里模型最相信的是"7"。
但正确答案其实是"2"。
因此误差明显更大:
python
0.5975也就是说:
均方误差越小,说明模型预测越接近真实答案。
神经网络训练的目标,本质上就是:
python
不断调整参数,让均方误差越来越小4.2.2 交叉熵误差
除了均方误差之外,神经网络里还有一个非常常用的损失函数:
python
交叉熵误差(Cross Entropy Error)它的公式如下:
E = − ∑ k t k log y k E=-\sum_k t_k\log y_k E=−k∑tklogyk
其中:
-
y_k表示模型输出的概率
-
t_k表示正确标签(one-hot)
-
log表示自然对数
交叉熵误差和均方误差最大的不同在于:
它只关心"正确答案对应的概率"有多大。
因为在 one-hot 表示中:
python
t = [0, 0, 1, 0, 0, ...]只有正确标签的位置是 1。
其他位置全是 0。
所以:
python
t_k * log(y_k)实际上只有正确答案那一项会被保留下来。
比如:
正确答案是数字 2。
如果模型输出:
python
y = [0.1, 0.05, 0.6, ...]那么真正参与计算的,其实只有:
python
-log(0.6)结果约等于:
python
0.51如果模型对正确答案非常没信心:
python
y = [0.1, 0.05, 0.1, ..., 0.6, ...]此时正确答案"2"的概率只有:
python
0.1那么损失会变成:
python
-log(0.1) ≈ 2.30误差一下子变得很大。
这里其实体现了交叉熵误差的核心思想:
- 正确答案概率越大
→ 损失越小 - 正确答案概率越小
→ 损失越大
当模型对正确答案的概率预测为:
python
1时:
python
log(1) = 0因此:
python
交叉熵误差 = 0说明模型预测完全正确。
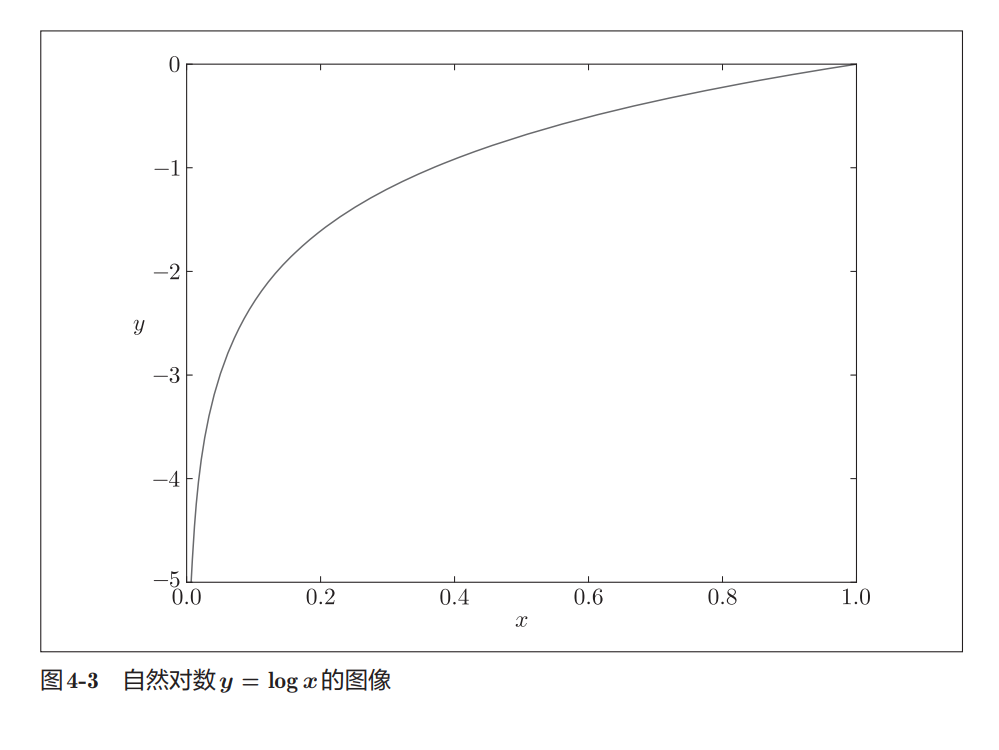
自然对数函数的图像大致如下:
- 当
x → 1时
→log(x) → 0 - 当
x → 0时
→log(x)会快速减小
因此:
python
-log(x)会在概率很小时迅速变大。
这意味着:
如果模型把正确答案概率预测得很低,交叉熵会给予非常大的惩罚。
这也是它在分类问题中特别好用的原因。
交叉熵误差的代码实现如下:
python
def cross_entropy_error(y, t):
delta = 1e-7
return -np.sum(t * np.log(y + delta))这里:
python
delta = 1e-7是一个非常小的值。
作用是防止:
python
np.log(0)因为:
python
log(0) = -∞会导致程序无法正常计算。
因此通常会人为加一个极小值做保护。
从结果上也能明显看出来:
- 正确答案概率高
→ 交叉熵小 - 正确答案概率低
→ 交叉熵大
因此,训练神经网络时:
python
让交叉熵误差不断减小就等价于:
python
让模型越来越相信正确答案4.2.3 mini-batch学习
前面介绍的均方误差和交叉熵误差,都是针对单个样本计算的。
但实际训练神经网络时,我们面对的是整个训练集,因此损失函数也应该反映所有训练数据的整体表现。
以交叉熵误差为例,当训练集包含 N 个样本时,损失函数可以写成:
E = − 1 N ∑ n ∑ k t n k log y n k E=-\frac{1}{N}\sum_n\sum_k t_{nk}\log y_{nk} E=−N1n∑k∑tnklogynk
这里:
N:训练样本总数n:第n个样本k:输出层第k个神经元- y n k y_{nk} ynk:模型对第
n个样本的预测结果 - t n k t_{nk} tnk:第
n个样本的真实标签
其实这个公式并不复杂,本质上就是:
把每个样本的交叉熵误差全部加起来,再求平均值。
最后除以 N 的作用是进行平均化(正规化)。
这样无论训练集有:
- 100 条数据
- 1000 条数据
- 10000 条数据
最终得到的损失函数都处于同一个量级,便于比较和分析。
不过,实际训练时通常不会每次都使用全部训练数据。
原因很简单:
- 数据量太大
- 计算速度太慢
- 每更新一次参数都要遍历全部样本
例如:
MNIST 训练集有:
60000 个样本如果每次计算损失函数都使用全部数据,训练效率会非常低。
而现实中的数据集往往有:
- 几百万条
- 几千万条
- 甚至更多
这种情况下,全量计算几乎是不现实的。
因此,深度学习采用了一种折中的方法:
每次只随机抽取一小部分数据参与训练。
这部分数据称为:
Mini-Batch(小批量)例如:
python
训练集:60000条
随机抽取:100条然后:
- 计算这100条数据的损失函数
- 计算梯度
- 更新参数
下一次再随机抽取另外100条数据继续训练。
这种训练方式就叫:
python
Mini-Batch Learning以 MNIST 为例:
python
(x_train, t_train), (x_test, t_test) = \
load_mnist(normalize=True, one_hot_label=True)读取完成后:
python
x_train.shape
# (60000, 784)
t_train.shape
# (60000, 10)这里:
60000表示训练样本数量784表示输入层维度(28×28像素)10表示输出层维度(数字0~9)
因此:
python
x_train[i]表示第 i 道题(输入图片)
而:
python
t_train[i]表示对应的标准答案。
两者下标一一对应。
接下来随机抽取一个 Mini-Batch:
python
train_size = x_train.shape[0]
batch_size = 10
batch_mask = np.random.choice(train_size, batch_size)
x_batch = x_train[batch_mask]
t_batch = t_train[batch_mask]这里:
python
np.random.choice(60000, 10)会随机生成 10 个索引,例如:
python
array([
11035, 34071, 37349, 56787, 27918,
1853, 11821, 31543, 14277, 8427
])然后:
python
x_train[batch_mask]取出对应的 10 张图片。
python
t_train[batch_mask]取出对应的 10 个答案。
于是就得到了一个:
python
Mini-Batch = 10组(图片 + 标签)这里的 Mini-Batch 本质上就是随机抽出来的 10 组训练样本。
本节重点
- 损失函数最终关注的是整个训练集的平均误差。
- 全量数据计算代价太高,因此实际训练采用 Mini-Batch。
- Mini-Batch 就是从训练集中随机抽取的一小部分样本。
x_train[i]是第i个输入数据,t_train[i]是对应答案。batch_size=10时,每次训练只使用随机选出的 10 组样本。- 神经网络训练过程本质上是在不断抽取 Mini-Batch,并利用它们更新参数。
4.2.4 mini-batch版交叉熵误差的实现
前面实现的交叉熵误差只适用于单个样本。
但实际训练时,我们输入的往往是一个 Mini-Batch,因此需要让损失函数能够一次处理多条数据。
首先来看支持 Batch 的版本:
python
def cross_entropy_error(y, t):
if y.ndim == 1:
t = t.reshape(1, t.size)
y = y.reshape(1, y.size)
batch_size = y.shape[0]
return -np.sum(t * np.log(y + 1e-7)) / batch_size这里增加了两个关键处理。
处理单个样本输入
如果:
python
y.ndim == 1说明输入的是:
python
y = [0.1, 0.2, 0.7, 0, 0, 0, 0, 0, 0, 0]这样的单条数据。
而后面的代码统一按照二维数组处理,因此需要先转换形状:
python
y.reshape(1, y.size)例如:
python
[0.1, 0.2, 0.7, 0, 0, 0, 0, 0, 0, 0]变成:
python
[[0.1, 0.2, 0.7, 0, 0, 0, 0, 0, 0, 0]]形状从:
python
(10,)变成:
python
(1, 10)这样无论输入一个样本还是多个样本,都能使用同一套代码。
求平均损失
python
batch_size = y.shape[0]表示当前 Batch 中有多少条数据。
例如:
python
y.shape
# (100, 10)说明:
- Batch 中有100个样本
- 每个样本有10个分类概率
因此:
python
batch_size = 100最后:
python
/ batch_size表示求平均损失。
这样得到的结果不会因为 Batch 大小不同而发生明显变化。
标签形式的交叉熵误差
前面的写法要求监督数据采用 One-Hot 表示:
python
t = [0,0,1,0,0,0,0,0,0,0]但很多时候标签其实直接保存为:
python
t = 2或者:
python
t = [2,7,0,9,4]此时可以进一步优化:
python
def cross_entropy_error(y, t):
if y.ndim == 1:
t = t.reshape(1, t.size)
y = y.reshape(1, y.size)
batch_size = y.shape[0]
return -np.sum(
np.log(y[np.arange(batch_size), t] + 1e-7)
) / batch_size为什么可以这样写?
先回忆 One-Hot 版本:
python
t * np.log(y)例如:
python
t = [0,0,1,0]
y = [0.1,0.2,0.6,0.1]计算后:
python
[0, 0, log(0.6), 0]实际上只有正确答案的位置保留下来了。
其他位置全被乘成了0。
所以我们真正需要的其实只是:
python
log(0.6)也就是:
正确标签对应位置的预测概率。
np.arange(batch_size) 的作用
假设:
python
batch_size = 5那么:
python
np.arange(batch_size)得到:
python
[0, 1, 2, 3, 4]如果标签为:
python
t = [2, 7, 0, 9, 4]表示:
- 第0个样本正确答案是2
- 第1个样本正确答案是7
- 第2个样本正确答案是0
- 第3个样本正确答案是9
- 第4个样本正确答案是4
此时:
python
y[np.arange(batch_size), t]等价于:
python
[
y[0,2],
y[1,7],
y[2,0],
y[3,9],
y[4,4]
]即:
一次性取出每个样本对应正确答案的预测概率。
例如:
python
[0.6, 0.8, 0.9, 0.7, 0.5]然后再计算:
python
np.log(...)即可得到交叉熵误差。
本节重点
- Mini-Batch版交叉熵误差需要同时支持单个样本和批量样本。
reshape()用于把一维数据统一转换成二维数据。batch_size = y.shape[0]表示 Batch 中样本数量。- 最后除以
batch_size,得到平均损失。 - 标签形式比 One-Hot 更节省空间。
y[np.arange(batch_size), t]可以一次性取出每个样本正确类别对应的预测概率。- 交叉熵误差本质上只关心正确答案对应的概率有多大。
4.2.5 为何要设定损失函数
学习到这里,一个很自然的问题是:
我们最终想提高的是识别准确率,为什么还要额外设计一个损失函数呢?
例如在手写数字识别中:
- 最终目标是提高识别精度
- 训练时却在不断减小损失函数
看起来好像绕了一圈。
实际上,这是因为神经网络学习依赖于导数(梯度)。
神经网络训练时,会不断调整:
- 权重(Weight)
- 偏置(Bias)
而调整方向则由导数决定。
例如:
python
某个权重的导数 < 0说明:
增大这个权重,损失函数会减小。
反之:
python
某个权重的导数 > 0说明:
减小这个权重,损失函数会减小。
因此,训练过程实际上是在做:
python
计算梯度 → 更新参数 → 降低损失如果导数为 0:
python
参数怎么改都不会让损失变化此时学习就停止了。
那么为什么不用识别精度来求导呢?
原因在于:
识别精度是不连续的。
举个例子。
假设:
python
100 个样本
正确识别 32 个那么:
python
Accuracy = 32%此时即使把网络参数稍微调整一点点:
python
32% → 32%识别精度通常不会发生变化。
因为预测结果还没有跨过分类边界。
例如:
原来模型输出:
python
数字2概率 = 0.51
数字7概率 = 0.49预测结果:
python
2调整参数后:
python
数字2概率 = 0.55
数字7概率 = 0.45预测结果仍然是:
python
2因此:
python
准确率完全没变虽然模型实际上已经变好了。
识别精度的变化往往是这样的:
python
32%
32%
32%
32%
33%
33%
33%它只能跳跃式变化。
而不会出现:
python
32.0001%
32.0002%
32.0003%这样的连续变化。
因此:
准确率对于微小参数变化几乎没有反应。
对应的导数自然大部分时候都是:
python
0这样梯度下降法就失去了作用。
而损失函数不同。
例如交叉熵误差:
python
0.92543参数稍微变化一点:
python
0.92317再变化一点:
python
0.92084损失会连续变化。
这样就能计算导数。
也就能知道:
python
参数应该往哪个方向调整这也是为什么神经网络训练时:
python
优化目标 = 损失函数而不是:
python
优化目标 = 识别精度实际上:
- 训练阶段优化损失函数
- 评估阶段观察识别精度
两者分工不同。
这个问题和第3章提到的激活函数其实非常类似。
阶跃函数:
python
x < 0 → 0
x ≥ 0 → 1图像像开关一样。
除了跳变点以外:
python
导数 = 0y = { 0 ( x < 0 ) 1 ( x ≥ 0 ) y=\begin{cases}0&(x<0)\\1&(x\ge0)\end{cases} y={01(x<0)(x≥0)
因此参数即使发生微小变化:
python
输出也不会变化神经网络就无法学习。
而 Sigmoid 函数则不同:
y = 1 1 + e − x y=\frac{1}{1+e^{-x}} y=1+e−x1
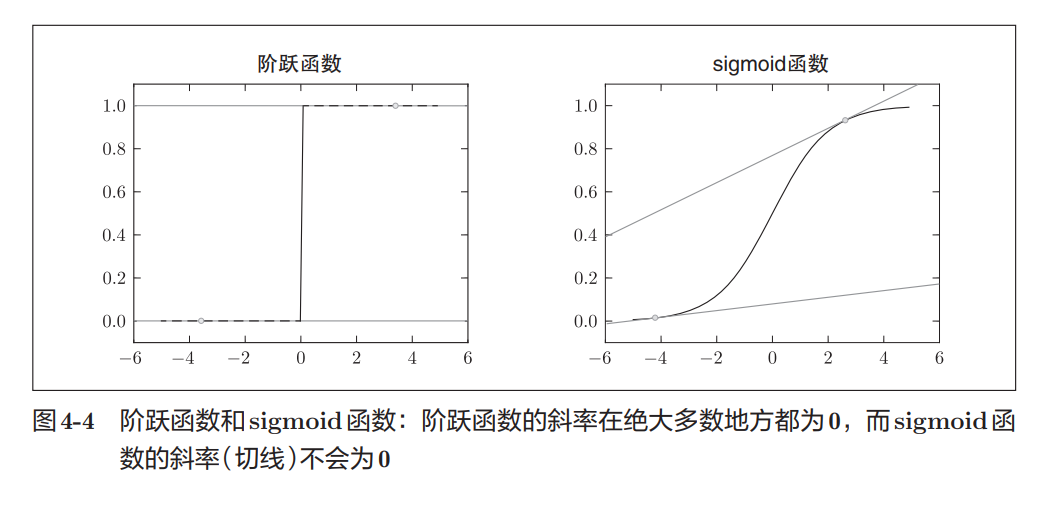
Sigmoid 具有两个重要特点:
- 输出连续变化
- 导数也连续变化
因此:
python
参数变化一点
↓
输出变化一点
↓
损失变化一点
↓
梯度能够计算神经网络才能顺利学习。
本节重点
- 神经网络依靠梯度(导数)更新参数。
- 识别精度是离散变化的,对微小参数变化几乎没有反应。
- 因此以识别精度作为优化目标时,大多数位置导数为 0。
- 损失函数是连续变化的,能够提供有效梯度。
- 神经网络训练时优化损失函数,而不是直接优化识别精度。
- 阶跃函数导数几乎处处为 0,因此不适合作为神经网络激活函数。
- Sigmoid 函数输出连续、导数连续,能够支持梯度学习。
4.3 数值微分
梯度法使用梯度的信息决定前进的方向。本节将介绍梯度是什么、有什么性质等内容。在这之前,我们先来介绍一下导数。
4.3.1 导数
在神经网络学习中,导数是一个非常重要的概念。
简单来说:
导数表示某个位置上,函数变化得有多快。
书中用马拉松举了一个例子。
假设运动员:
python
10分钟跑了2千米那么平均速度为:
python
2 ÷ 10 = 0.2 千米/分钟不过这里得到的是:
一段时间内的平均变化率
而导数关注的是:
某一个瞬间的变化率
就像汽车仪表盘显示的时速一样,它反映的是当前这一刻的速度,而不是整个行程的平均速度。
数学上,导数定义为:
d f ( x ) d x = lim h → 0 f ( x + h ) − f ( x ) h \frac{df(x)}{dx}=\lim_{h\to0}\frac{f(x+h)-f(x)}{h} dxdf(x)=h→0limhf(x+h)−f(x)
其中:
f(x)表示函数x表示当前位置h表示一个极小的变化量
整个公式表达的含义是:
当 x 发生一个极小变化时,函数值会变化多少。
也可以理解为:
函数在该点切线的斜率。
数值微分
理论上导数由极限定义:
python
h → 0但计算机无法真正表示"无限接近0"。
因此实际计算时,会使用一个很小的数来近似求导。
这种方法称为:
python
数值微分(Numerical Differentiation)最直接的实现方式如下:
python
# 不好的实现示例
def numerical_diff(f, x):
h = 1e-50
return (f(x + h) - f(x)) / h看起来完全符合导数定义,但实际上存在两个问题。
问题一:h太小会产生舍入误差
代码中使用:
python
h = 1e-50希望尽可能接近0。
但计算机的浮点数精度有限。
例如:
python
np.float32(1e-50)结果:
python
0.0因为数字太小,已经超出了 float32 的表示能力。
这种由于精度不足导致的误差称为:
python
舍入误差(Rounding Error)因此实际计算中通常采用:
python
h = 1e-4即:
python
0.0001这个值已经足够小,同时又不会产生严重精度问题。
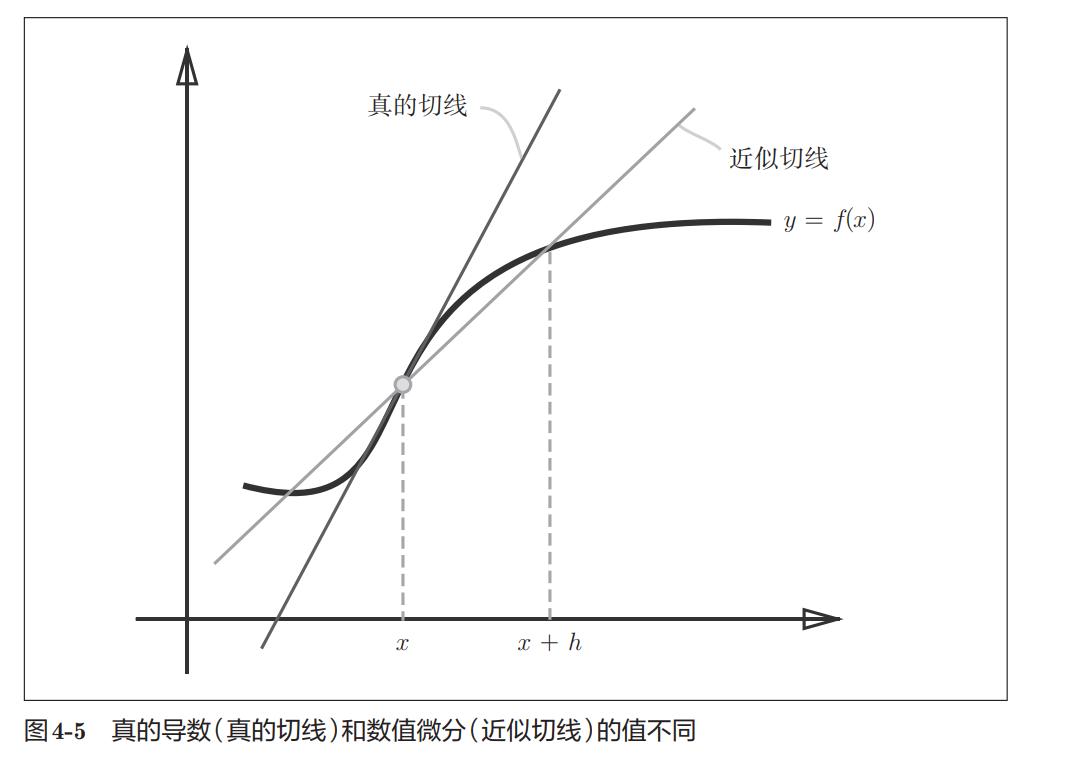
问题二:前向差分本身存在误差
前面的公式实际上计算的是:
python
f(x+h) - f(x)对应图中的这条斜线:
python
(x, f(x))
↓
(x+h, f(x+h))求得的是两点连线的斜率。
而真正的导数应该是:
x 点处切线的斜率
因此两者并不完全相同。
图中所示:
- 深色直线:真正切线
- 浅色直线:近似切线
两者存在一定偏差。
中心差分
为了减小这种误差,通常采用:
python
x+h和
python
x-h两侧同时计算。
公式变为:
f ( x + h ) − f ( x − h ) 2 h \frac{f(x+h)-f(x-h)}{2h} 2hf(x+h)−f(x−h)
这种方法称为:
python
中心差分(Central Difference)相比:
python
f(x+h)-f(x)的前向差分,
中心差分以 x 为中心进行计算,因此更加接近真实切线。
最终实现如下:
python
def numerical_diff(f, x):
h = 1e-4
return (f(x+h) - f(x-h)) / (2*h)这也是后续章节计算数值梯度时使用的方法。
数值微分 vs 解析求导
求导大致有两种方式。
1. 数值微分
利用差分近似:
python
(f(x+h)-f(x-h))/(2*h)特点:
- 简单直观
- 容易实现
- 存在近似误差
- 计算速度较慢
2. 解析求导
直接利用数学公式推导。
例如:
y = x 2 y=x^2 y=x2
解析求导得到:
d y d x = 2 x \frac{dy}{dx}=2x dxdy=2x
当:
python
x = 2时:
python
dy/dx = 4这种方法得到的是理论上的真实导数。
特点:
- 没有数值误差
- 计算速度快
- 需要数学推导
本节重点
-
导数表示函数在某一点的瞬时变化率。
-
导数本质上对应函数切线的斜率。
-
计算机无法真正令
h→0,因此使用数值微分近似计算。 -
h太小会产生舍入误差。 -
前向差分误差较大,因此采用中心差分:
python(f(x+h)-f(x-h))/(2h) -
利用差分近似求导称为数值微分。
-
利用数学公式直接推导称为解析求导。
-
神经网络后续计算梯度时,会大量使用数值微分的思想。
4.3.2 数值微分的例子
前面介绍了数值微分的实现方法,下面通过一个具体例子来看看它的效果。
这里使用的函数是:
y = 0.01 x 2 + 0.1 x y=0.01x^2+0.1x y=0.01x2+0.1x
对应的 Python 实现:
python
def function_1(x):
return 0.01 * x**2 + 0.1 * x观察函数图像
利用 matplotlib 绘图后,可以得到如图4-6所示的曲线。
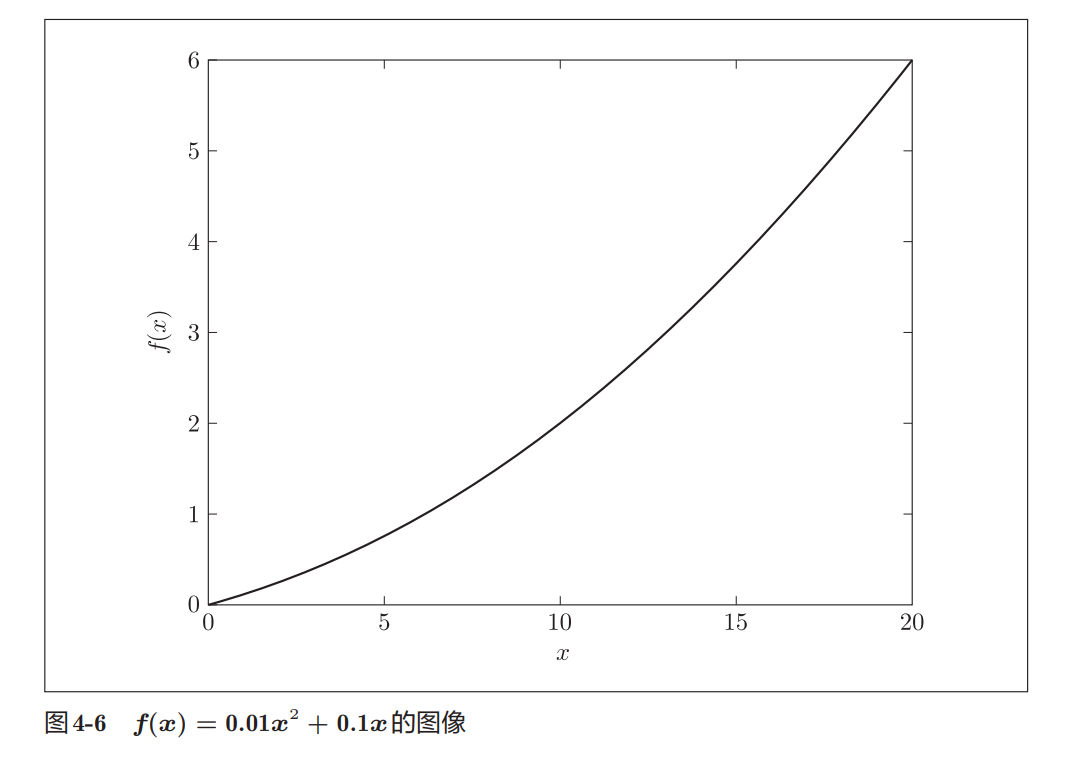
从图像可以发现:
- 函数整体单调递增
- 曲线越来越陡
- 说明随着
x增大,函数变化速度也在增大
这也意味着:
函数的导数会随着 x 的增大而增大。
使用数值微分计算导数
利用上一节实现的 numerical_diff():
python
numerical_diff(function_1, 5)结果:
python
0.1999999999990898计算:
python
numerical_diff(function_1, 10)结果:
python
0.2999999999986347因此:
python
x = 5 时,导数约为 0.2
x = 10 时,导数约为 0.3这里的导数表示:
x 每增加 1 个单位时,函数值大约增加多少。
例如:
python
x = 5 时
导数 ≈ 0.2表示附近区域内:
python
x 增加 1
f(x) 大约增加 0.2与解析解比较
这个函数其实可以直接求导。
原函数:
y = 0.01 x 2 + 0.1 x y=0.01x^2+0.1x y=0.01x2+0.1x
解析求导得到:
d y d x = 0.02 x + 0.1 \frac{dy}{dx}=0.02x+0.1 dxdy=0.02x+0.1
代入:
python
x = 5得到:
python
0.02 × 5 + 0.1 = 0.2代入:
python
x = 10得到:
python
0.02 × 10 + 0.1 = 0.3与数值微分结果:
python
0.1999999999990898
0.2999999999986347几乎完全一致。
误差仅来自浮点数计算。
切线的含义
书中接着利用求出的导数绘制了切线。
例如:
python
x = 5处的切线斜率为:
python
0.2而:
python
x = 10处的切线斜率为:
python
0.3从图4-7可以明显看出:
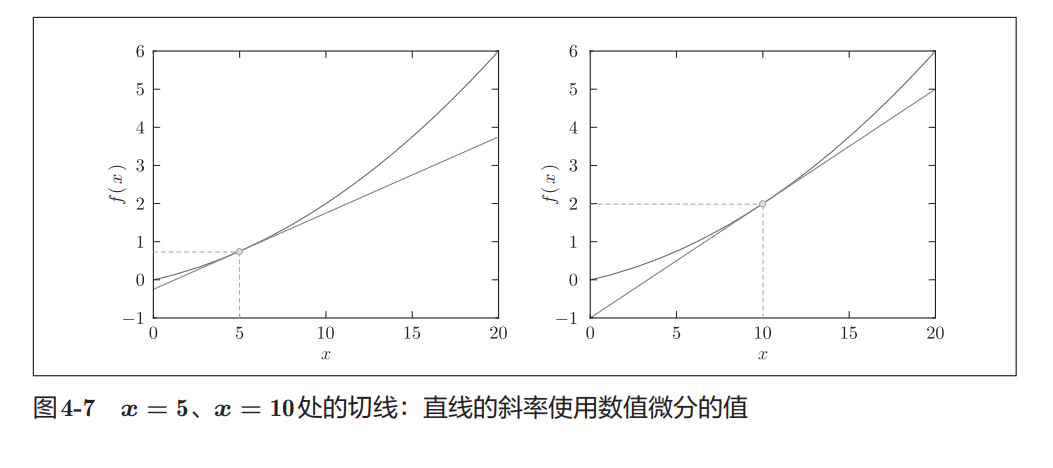
x=5处切线较平缓x=10处切线更陡
这与我们刚刚计算出的导数大小完全一致:
python
0.3 > 0.2说明:
导数越大,函数增长得越快,切线也越陡。
本节重点
-
数值微分可以近似计算函数在某一点的导数。
-
导数表示函数在该点的瞬时变化率。
-
对函数
pythony = 0.01x² + 0.1x而言:
x=5时导数约为0.2x=10时导数约为0.3
-
解析求导结果为:
d y d x = 0.02 x + 0.1 \frac{dy}{dx}=0.02x+0.1 dxdy=0.02x+0.1
-
数值微分结果与解析解几乎一致。
-
导数本质上对应函数在该点切线的斜率。
-
导数越大,函数增长越快,切线越陡。
4.3.3 偏导数
前面讨论的导数只有一个变量,例如:
y = x 2 y = x^2 y=x2
而在神经网络中,函数往往会包含多个参数。
因此,我们需要研究:
当函数有多个变量时,如何计算某个变量对结果的影响。
多变量函数
这里使用的例子是:
f ( x 0 , x 1 ) = x 0 2 + x 1 2 f(x_0, x_1)=x_0^2+x_1^2 f(x0,x1)=x02+x12
对应的 Python 实现:
python
def function_2(x):
return x[0]**2 + x[1]**2
# 等价写法
def function_2(x):
return np.sum(x**2)这里:
x[0]对应 x 0 x_0 x0x[1]对应 x 1 x_1 x1
函数的作用很简单:
计算所有变量平方后的总和。
函数图像
与前面的单变量函数不同:
f ( x 0 , x 1 ) f(x_0,x_1) f(x0,x1)
包含两个输入变量,因此图像不再是二维曲线,而是三维曲面。
从图4-8可以看到:
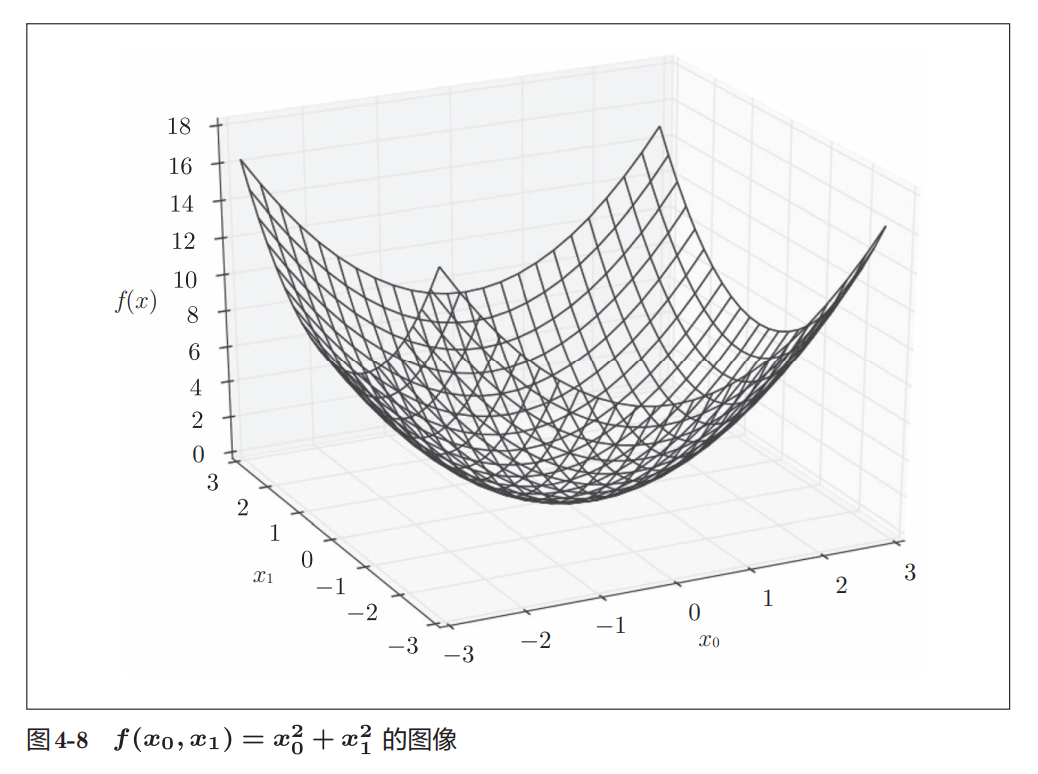
- 曲面像一个碗
- 最低点位于原点
即:
( x 0 , x 1 ) = ( 0 , 0 ) (x_0,x_1)=(0,0) (x0,x1)=(0,0)
此时:
f ( x 0 , x 1 ) = 0 f(x_0,x_1)=0 f(x0,x1)=0
取得最小值。
什么是偏导数
对于多变量函数:
f ( x 0 , x 1 ) f(x_0,x_1) f(x0,x1)
我们可以分别研究:
x₀变化时函数如何变化x₁变化时函数如何变化
这种只针对某一个变量求导的方法称为:
偏导数(Partial Derivative)
记作:
∂ f ∂ x 0 \frac{\partial f}{\partial x_0} ∂x0∂f
和
∂ f ∂ x 1 \frac{\partial f}{\partial x_1} ∂x1∂f
这里的符号:
∂ \partial ∂
表示偏导数。
求关于 x 0 x_0 x0 的偏导数
题目:
当
x₀=3,x₁=4时,求关于x₀的偏导数。
求偏导时:
固定 x₁
只让 x₀ 变化因此把:
x 1 = 4 x_1=4 x1=4
代入原函数:
f ( x 0 ) = x 0 2 + 4 2 f(x_0)=x_0^2+4^2 f(x0)=x02+42
对应代码:
python
def function_tmp1(x0):
return x0*x0 + 4.0**2然后直接调用数值微分:
python
numerical_diff(function_tmp1, 3.0)结果:
python
6.00000000000378约等于:
6 6 6
求关于 x 1 x_1 x1 的偏导数
同理:
固定 x₀
只让 x₁ 变化令:
x 0 = 3 x_0=3 x0=3
得到:
f ( x 1 ) = 3 2 + x 1 2 f(x_1)=3^2+x_1^2 f(x1)=32+x12
对应代码:
python
def function_tmp2(x1):
return 3.0**2 + x1*x1计算:
python
numerical_diff(function_tmp2, 4.0)结果:
python
7.999999999999119约等于:
8 8 8
为什么结果是 6 和 8?
原函数:
f ( x 0 , x 1 ) = x 0 2 + x 1 2 f(x_0,x_1)=x_0^2+x_1^2 f(x0,x1)=x02+x12
解析求偏导:
对 x₀ 求导:
∂ f ∂ x 0 = 2 x 0 \frac{\partial f}{\partial x_0}=2x_0 ∂x0∂f=2x0
代入:
x 0 = 3 x_0=3 x0=3
得到:
2 × 3 = 6 2\times3=6 2×3=6
对 x₁ 求导:
∂ f ∂ x 1 = 2 x 1 \frac{\partial f}{\partial x_1}=2x_1 ∂x1∂f=2x1
代入:
x 1 = 4 x_1=4 x1=4
得到:
2 × 4 = 8 2\times4=8 2×4=8
与数值微分的结果完全一致。
偏导数的本质
偏导数和普通导数本质上是一样的:
都是在求某一点的斜率。
区别在于:
普通导数:
python
只有一个变量偏导数:
python
有多个变量
只研究其中一个变量
其余变量保持不变因此可以简单记忆:
偏导数 = 固定其它变量后,对目标变量求导。
本节重点
-
多变量函数包含多个输入变量。
-
对多变量函数求导时得到的是偏导数。
-
偏导数表示:
固定其它变量时,目标变量变化对函数的影响。
-
对于函数:
f ( x 0 , x 1 ) = x 0 2 + x 1 2 f(x_0,x_1)=x_0^2+x_1^2 f(x0,x1)=x02+x12
有:
∂ f ∂ x 0 = 2 x 0 \frac{\partial f}{\partial x_0}=2x_0 ∂x0∂f=2x0
∂ f ∂ x 1 = 2 x 1 \frac{\partial f}{\partial x_1}=2x_1 ∂x1∂f=2x1
-
当
(x₀,x₁)=(3,4)时:∂ f ∂ x 0 = 6 \frac{\partial f}{\partial x_0}=6 ∂x0∂f=6
∂ f ∂ x 1 = 8 \frac{\partial f}{\partial x_1}=8 ∂x1∂f=8
-
计算偏导数时,需要固定其它变量,仅让目标变量发生变化。
4.4 梯度
前面学习偏导数时,我们分别计算了:
∂ f ∂ x 0 \frac{\partial f}{\partial x_0} ∂x0∂f
和
∂ f ∂ x 1 \frac{\partial f}{\partial x_1} ∂x1∂f
但对于多变量函数来说,仅仅知道单个变量的变化情况还不够。
我们希望能够同时描述:
所有变量变化时,函数会朝哪个方向变化。
因此引入了梯度(Gradient)的概念。
什么是梯度
对于多变量函数:
f ( x 0 , x 1 ) f(x_0,x_1) f(x0,x1)
把所有偏导数组合在一起:
( ∂ f ∂ x 0 , ∂ f ∂ x 1 ) \left( \frac{\partial f}{\partial x_0}, \frac{\partial f}{\partial x_1} \right) (∂x0∂f,∂x1∂f)
得到的向量称为梯度。
例如:
f ( x 0 , x 1 ) = x 0 2 + x 1 2 f(x_0,x_1)=x_0^2+x_1^2 f(x0,x1)=x02+x12
在点:
( 3 , 4 ) (3,4) (3,4)
处:
∂ f ∂ x 0 = 6 \frac{\partial f}{\partial x_0}=6 ∂x0∂f=6
因此梯度为:
( 6 , 8 ) (6,8) (6,8)
梯度可以理解为:
函数在各个变量方向上的变化率组成的向量。
numerical_gradient 的实现思路
python
def _numerical_gradient(f, x):
h = 1e-4 # 0.0001
grad = np.zeros_like(x)
for idx in range(x.size):
tmp_val = x[idx]
x[idx] = float(tmp_val) + h
fxh1 = f(x) # f(x+h)
x[idx] = tmp_val - h
fxh2 = f(x) # f(x-h)
grad[idx] = (fxh1 - fxh2) / (2*h)
x[idx] = tmp_val # 还原值
return grad书中的 numerical_gradient() 本质上是在做:
- 固定其它变量
- 对当前变量做中心差分
- 计算偏导数
- 把所有偏导数存入数组
- 返回最终梯度向量
例如:
python
numerical_gradient(function_2, np.array([3.0, 4.0]))结果:
python
array([6., 8.])表示:

同样:
python
numerical_gradient(function_2, np.array([0.0, 2.0]))得到:
python
array([0., 4.])说明:

梯度图的含义
对于函数:
f ( x 0 , x 1 ) = x 0 2 + x 1 2 f(x_0,x_1)=x_0^2+x_1^2 f(x0,x1)=x02+x12
书中绘制了对应的梯度图。
图中的每个箭头都是一个梯度向量。
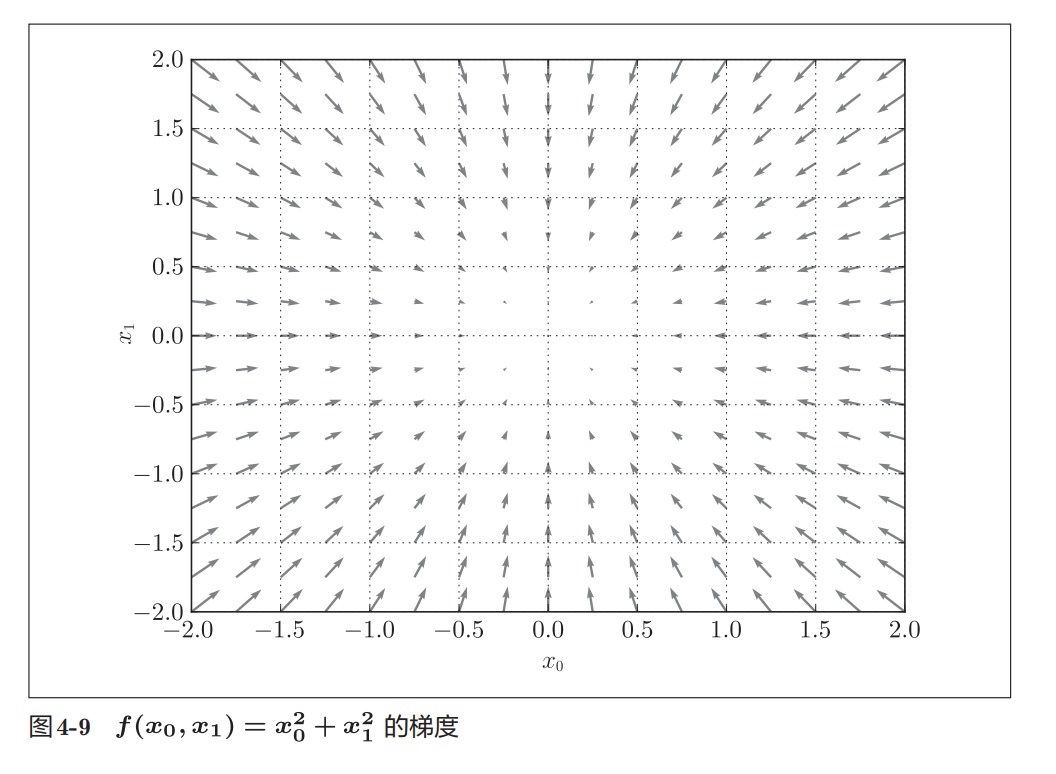
观察图像可以发现:
- 箭头都指向原点附近
- 离原点越远,箭头越长
- 越接近原点,箭头越短
这是因为:
( 0 , 0 ) (0,0) (0,0)
是该函数的最小值点。
梯度表示什么方向
梯度最重要的性质是:
梯度指向函数值增加最快的方向。
例如:
在点:
( 3 , 4 ) (3,4) (3,4)
处,
梯度为:
( 6 , 8 ) (6,8) (6,8)
说明如果沿着:
( 6 , 8 ) (6,8) (6,8)
这个方向移动,
函数值会增长得最快。
为什么图中箭头指向最低点
书中特别说明:
图4-9画的并不是梯度本身,而是:
− ∇ f -\nabla f −∇f
即负梯度。
因此图中的箭头全部朝向函数最低处。
对于:
f ( x 0 , x 1 ) = x 0 2 + x 1 2 f(x_0,x_1)=x_0^2+x_1^2 f(x0,x1)=x02+x12
最低点位于:
( 0 , 0 ) (0,0) (0,0)
所以所有箭头都指向原点。
梯度与神经网络学习
神经网络训练时,我们希望:
损失函数不断减小。
而梯度告诉我们:
哪个方向增长最快。
因此只需要朝着相反方向移动即可:
− ∇ f -\nabla f −∇f
这就是:
函数值下降最快的方向。
后面要学习的梯度下降法(Gradient Descent),正是利用这一性质不断更新参数,从而找到损失函数的最小值。
本节重点
- 梯度是所有偏导数组成的向量。
- 梯度描述了函数在各个变量方向上的变化率。
numerical_gradient()通过分别计算偏导数来求梯度。- 梯度指向函数值增加最快的方向。
- 负梯度指向函数值减小最快的方向。
- 图4-9绘制的是负梯度,因此箭头都指向最低点。
- 神经网络后续的参数优化,本质上就是沿着负梯度方向不断更新参数。
4.4.1 梯度法
机器学习和神经网络训练的目标,本质上都是寻找一组最优参数,使损失函数尽可能小。
但现实中的损失函数通常十分复杂:
- 参数很多
- 搜索空间很大
- 无法直接求出最小值
因此需要一种能够逐步逼近最优解的方法,这就是梯度法(Gradient Method)。
梯度法的基本思想
前面学习过:
梯度指向函数值增加最快的方向。
那么:
− ∇ f -\nabla f −∇f
自然就是函数值下降最快的方向。
因此,如果想让损失函数不断减小,只需要不断沿着负梯度方向移动即可。
梯度法的过程可以概括为:
当前位置
↓
计算梯度
↓
沿负梯度方向移动一步
↓
到达新位置
↓
重新计算梯度
↓
继续移动不断重复这个过程,就有机会逐渐靠近函数的最小值。
梯度不一定指向最小值
这里有一个容易误解的地方。
很多人会认为:
梯度是不是直接指向最小值?
答案是否定的。
梯度只能保证:
在当前位置附近,沿这个方向函数下降最快。
但无法保证:
这个方向最终一定能到达全局最小值。
对于复杂函数来说,还可能遇到:
- 局部最小值(Local Minimum)
- 鞍点(Saddle Point)
- 学习高原(Plateau)
例如:
- 局部最小值:某个小区域内最小,但不是全局最小
- 鞍点:某个方向是极大值,另一个方向是极小值
- 学习高原:梯度非常小,参数更新几乎停止
因此梯度法并不是万能的,但它依然是深度学习中最常用的优化方法。
梯度下降更新公式
梯度法可以写成下面的更新公式:
x 0 = x 0 − η ∂ f ∂ x 0 x_0=x_0-\eta \frac{\partial f}{\partial x_0} x0=x0−η∂x0∂f
其中:
- η \eta η:学习率(Learning Rate)
- ∂ f ∂ x i \frac{\partial f}{\partial x_i} ∂xi∂f:对应变量的偏导数
可以看出:
python
新参数 = 旧参数 - 学习率 × 梯度因为减去了梯度,所以参数会朝着函数值减小的方向移动。
学习率(Learning Rate)
公式中的:
η \eta η
称为学习率。
学习率决定:
每次沿梯度方向前进多远。
例如:
python
学习率大
↓
一步跨得远
学习率小
↓
一步跨得近学习率是梯度法中最重要的参数之一。
梯度下降法实现
书中的实现如下:
python
def gradient_descent(f, init_x, lr=0.01, step_num=100):
x = init_x
for i in range(step_num):
grad = numerical_gradient(f, x)
x -= lr * grad
return x参数说明:
f:目标函数init_x:初始位置lr:学习率(learning rate)step_num:迭代次数
核心代码只有一句:
python
x -= lr * grad对应的就是梯度下降更新公式。
求函数最小值的例子
目标函数:
f ( x 0 , x 1 ) = x 0 2 + x 1 2 f(x_0,x_1)=x_0^2+x_1^2 f(x0,x1)=x02+x12
初始点:
( − 3 , 4 ) (-3,4) (−3,4)
执行:
python
gradient_descent(
function_2,
init_x=np.array([-3.0, 4.0]),
lr=0.1,
step_num=100
)结果:
python
array([
-6.11110793e-10,
8.14814391e-10
])即:
( − 0.0000000006 , 0.0000000008 ) (-0.0000000006,\;0.0000000008) (−0.0000000006,0.0000000008)
已经非常接近:
( 0 , 0 ) (0,0) (0,0)
而对于这个函数来说:
( 0 , 0 ) (0,0) (0,0)
正是最小值点。
因此梯度下降法成功找到了最优解。
梯度下降过程
图4-10展示了参数更新轨迹。
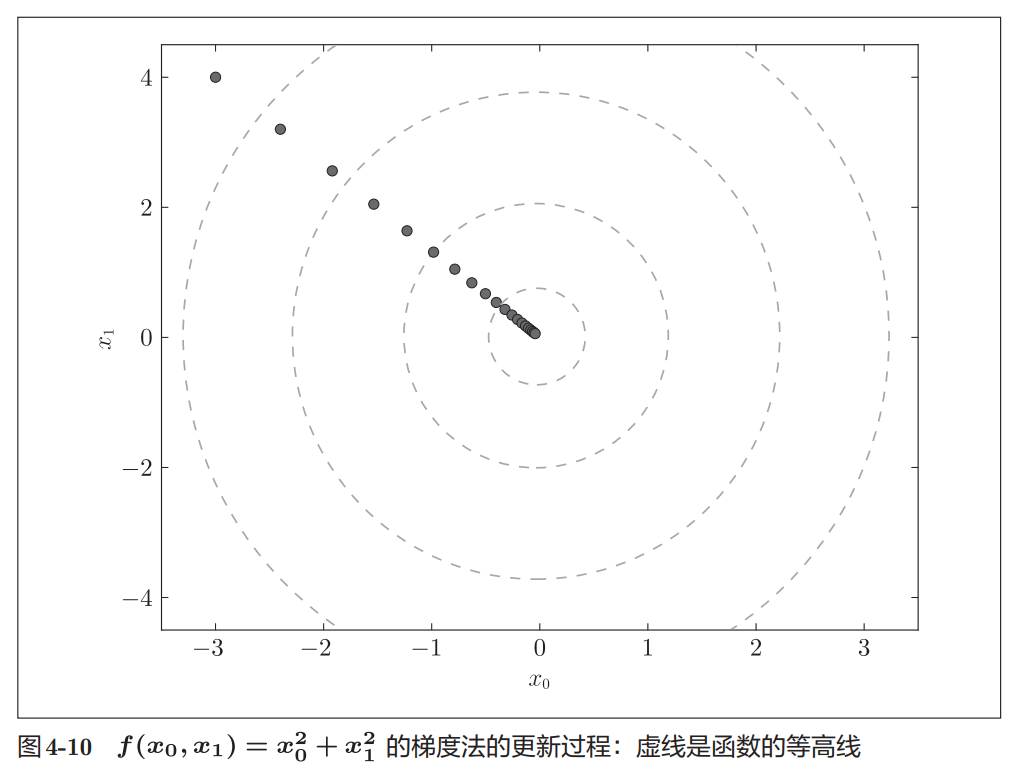
虚线表示函数的等高线。
可以把它想象成:
山谷中的地形图而梯度下降法就是:
从山坡某处出发
↓
不断朝下坡方向走
↓
最终靠近谷底在图中可以明显看到:
- 起点是
(-3,4) - 每次更新都更接近原点
- 最终逐渐收敛到最小值附近
学习率过大的问题
如果学习率设置得太大:
python
lr = 10.0结果:
python
array([
-2.58983747e+13,
-1.29524862e+12
])数值直接爆炸。
原因是:
python
一步跨太远
↓
越过最低点
↓
继续越过
↓
不断震荡甚至发散最终无法收敛。
学习率过小的问题
如果学习率设置得太小:
python
lr = 1e-10结果:
python
array([
-2.99999994,
3.99999992
])几乎没发生变化。
原因是:
python
每次只移动一点点
↓
100步根本走不远
↓
训练效率极低因此学习率过小也不好。
超参数
学习率属于:
超参数(Hyperparameter)
超参数与权重参数不同:
| 类型 | 获取方式 |
|---|---|
| 权重、偏置 | 训练过程中自动学习 |
| 学习率 | 人工设定 |
因此实际训练时通常需要:
- 尝试多个学习率
- 比较训练效果
- 选择最合适的参数
本节重点
- 梯度法利用梯度信息寻找函数最小值。
- 梯度指向函数值增长最快的方向。
- 负梯度指向函数值下降最快的方向。
- 梯度下降法不断沿负梯度方向更新参数。
- 更新公式:
x = x − η ∇ f x=x-\eta\nabla f x=x−η∇f
- 学习率决定每次更新的步长。
- 学习率过大容易发散。
- 学习率过小收敛速度很慢。
- 学习率属于超参数,需要人工设定。
- 梯度下降法是神经网络训练中最核心的优化思想之一。
4.4.2 神经网络的梯度
前面学习的梯度都是针对普通数学函数,例如:
f ( x 0 , x 1 ) = x 0 2 + x 1 2 f(x_0,x_1)=x_0^2+x_1^2 f(x0,x1)=x02+x12
而在神经网络中,我们真正关心的是:
权重参数发生变化时,损失函数会如何变化。
因此,神经网络中的梯度实际上是:
损失函数对权重参数的偏导数。
权重矩阵的梯度
假设神经网络有一个权重矩阵:
W = ( w 11 w 12 w 13 w 21 w 22 w 23 ) W= \begin{pmatrix} w_{11} & w_{12} & w_{13}\\ w_{21} & w_{22} & w_{23} \end{pmatrix} W=(w11w21w12w22w13w23)
损失函数记为:
L L L
那么梯度定义为:
∂ L ∂ W = ( ∂ L ∂ w 11 ∂ L ∂ w 12 ∂ L ∂ w 13 ∂ L ∂ w 21 ∂ L ∂ w 22 ∂ L ∂ w 23 ) \frac{\partial L}{\partial W} = \begin{pmatrix} \frac{\partial L}{\partial w_{11}} & \frac{\partial L}{\partial w_{12}} & \frac{\partial L}{\partial w_{13}} \\ \frac{\partial L}{\partial w_{21}} & \frac{\partial L}{\partial w_{22}} & \frac{\partial L}{\partial w_{23}} \end{pmatrix} ∂W∂L=(∂w11∂L∂w21∂L∂w12∂L∂w22∂L∂w13∂L∂w23∂L)
可以发现:
梯度矩阵的形状与权重矩阵完全相同。
如果:
python
W.shape = (2,3)那么:
python
dW.shape = (2,3)simpleNet 类
为了演示神经网络梯度的计算,书中实现了一个极简神经网络:
python
class simpleNet:
def __init__(self):
self.W = np.random.randn(2, 3)
def predict(self, x):
return np.dot(x, self.W)
def loss(self, x, t):
z = self.predict(x)
y = softmax(z)
loss = cross_entropy_error(y, t)
return loss这个网络非常简单:
python
输入层(2)
↓
权重W(2×3)
↓
输出层(3)
↓
Softmax
↓
交叉熵误差主要包含两个方法:
predict(x):计算预测结果loss(x, t):计算损失函数
前向传播过程
假设随机初始化得到:
python
net.W
[
[0.47, 0.99, 0.84],
[0.85, 0.03, 0.69]
]输入:
python
x = np.array([0.6, 0.9])预测:
python
p = net.predict(x)本质上是在做:
x W xW xW
得到:
python
[1.05, 0.63, 1.13]表示:
python
类别0得分:1.05
类别1得分:0.63
类别2得分:1.13然后:
python
np.argmax(p)结果:
python
2说明模型认为:
第2类概率最大。
正确答案:
python
t = [0,0,1]表示:
python
正确类别 = 2接着计算损失:
python
net.loss(x, t)得到:
python
0.928...这就是当前参数下的损失函数值。
求权重的梯度
目标:
求损失函数关于权重矩阵 W 的梯度。
即:
∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L
定义函数:
python
def f(W):
return net.loss(x, t)这里要特别注意:
虽然写了:
python
f(W)但实际上:
python
W会被 numerical_gradient() 自动修改。
因此:
python
net.loss(x,t)内部计算时使用的其实是变化后的:
python
net.W然后:
python
dW = numerical_gradient(f, net.W)得到:
python
[
[ 0.219 0.144 -0.363]
[ 0.329 0.215 -0.544]
]即:
d W = ( 0.219 0.144 − 0.363 0.329 0.215 − 0.544 ) dW= \begin{pmatrix} 0.219 & 0.144 & -0.363\\ 0.329 & 0.215 & -0.544 \end{pmatrix} dW=(0.2190.3290.1440.215−0.363−0.544)
如何理解梯度矩阵
例如:
∂ L ∂ w 11 ≈ 0.219 \frac{\partial L}{\partial w_{11}} \approx 0.219 ∂w11∂L≈0.219
表示:
如果把 w 11 w_{11} w11 增加一点,损失函数也会增加。
因此:
python
应该减小 w11再看:
∂ L ∂ w 23 ≈ − 0.544 \frac{\partial L}{\partial w_{23}} \approx -0.544 ∂w23∂L≈−0.544
表示:
如果把 w 23 w_{23} w23 增加一点,损失函数反而会减小。
因此:
python
应该增大 w23可以发现:
- 正梯度 → 参数往负方向更新
- 负梯度 → 参数往正方向更新
这正是梯度下降法:
W = W − η ∂ L ∂ W W=W-\eta \frac{\partial L}{\partial W} W=W−η∂W∂L
的思想。
lambda 写法
书中最后给出了更简洁的写法:
python
f = lambda w: net.loss(x, t)
dW = numerical_gradient(f, net.W)与前面的:
python
def f(W):
return net.loss(x, t)效果完全相同。
只是代码更简洁。
本节重点
- 神经网络学习的目标是优化损失函数。
- 神经网络中的梯度是损失函数对权重参数的偏导数。
- 梯度矩阵与权重矩阵形状相同。
simpleNet实现了一个最简单的两层网络结构。predict()负责前向传播。loss()负责计算交叉熵误差。numerical_gradient()可以计算权重矩阵的梯度。- 梯度的正负表示参数应该增大还是减小。
- 神经网络训练的核心就是:
W = W − η ∂ L ∂ W W=W-\eta\frac{\partial L}{\partial W} W=W−η∂W∂L
不断利用梯度更新权重,使损失函数逐渐减小。
4.5 学习算法的实现
前面已经介绍了神经网络学习所需的核心概念:
- 损失函数(Loss Function)
- Mini-Batch
- 梯度(Gradient)
- 梯度下降法(Gradient Descent)
这些内容组合起来,就构成了神经网络完整的学习流程。
神经网络学习的本质可以概括为:
通过不断调整权重和偏置,使损失函数越来越小,从而让模型的预测结果越来越接近真实答案。
学习前提
神经网络中存在大量参数:
- 权重(Weight)
- 偏置(Bias)
学习(Training)的过程,就是不断调整这些参数,使模型能够更好地拟合训练数据。
步骤1:随机抽取 Mini-Batch
首先从训练集中随机选取一小部分样本:
训练集
↓
随机抽样
↓
Mini-Batch例如:
60000条训练数据
↓
随机抽取100条这一小批数据就是当前轮训练所使用的数据。
训练目标是:
让这批数据对应的损失函数尽可能小。
步骤2:计算梯度
利用当前 Mini-Batch 计算损失函数。
然后求出损失函数对各个参数的梯度:
∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L
梯度表示:
当前参数应该朝哪个方向调整,才能最快降低损失函数。
步骤3:更新参数
根据梯度下降法更新参数:
W = W − η ∂ L ∂ W W=W-\eta\frac{\partial L}{\partial W} W=W−η∂W∂L
其中:
- W W W:权重参数
- η \eta η:学习率
- ∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L:梯度
更新后,模型参数会朝着损失更小的方向移动一点。
步骤4:重复训练
重复执行:
抽取 Mini-Batch
↓
计算梯度
↓
更新参数
↓
再次抽取 Mini-Batch经过大量迭代后:
- 损失函数逐渐减小
- 模型预测越来越准确
- 参数逐渐收敛到较优位置
随机梯度下降法(SGD)
由于每次使用的都是:
随机抽取的 Mini-Batch因此这种训练方式称为:
随机梯度下降法(Stochastic Gradient Descent,SGD)
名称来源:
- Stochastic:随机的
- Gradient:梯度
- Descent:下降
缩写为:
SGD很多深度学习框架中都会直接提供:
SGD(...)优化器,其原理正是这里介绍的随机梯度下降法。
本节重点
-
神经网络学习的目标是找到更优的权重和偏置。
-
学习过程由 Mini-Batch、梯度计算和参数更新组成。
-
每轮训练包含四个步骤:
Mini-Batch ↓ 计算梯度 ↓ 更新参数 ↓ 重复 -
梯度用于指示损失函数下降最快的方向。
-
参数通过梯度下降法不断更新。
-
使用随机抽取的 Mini-Batch 进行梯度下降,称为随机梯度下降法(SGD)。
-
SGD 是深度学习中最基础、最常见的优化算法。
4.5.1 2层神经网络的类
前面已经介绍了神经网络学习所需的全部基础知识:
- 损失函数
- Mini-Batch
- 梯度
- 梯度下降法
接下来,书中将这些内容组合起来,实现一个真正能够学习的两层神经网络------TwoLayerNet。
这里的网络结构如下:
python
输入层(784)
↓
隐藏层(100)
↓
输出层(10)其中:
- 输入层:MNIST图片(28×28=784)
- 隐藏层:100个神经元(可自行调整)
- 输出层:10个神经元(对应数字0~9)
params:保存网络参数
params 是一个字典,用来保存神经网络中的所有参数。
包括:
python
params['W1']
params['b1']
params['W2']
params['b2']分别表示:
| 参数 | 含义 |
|---|---|
| W1 | 输入层 → 隐藏层权重 |
| b1 | 隐藏层偏置 |
| W2 | 隐藏层 → 输出层权重 |
| b2 | 输出层偏置 |
对于:
python
net = TwoLayerNet(
input_size=784,
hidden_size=100,
output_size=10
)参数形状为:
python
W1.shape = (784, 100)
b1.shape = (100,)
W2.shape = (100, 10)
b2.shape = (10,)可以发现:
python
784 → 100 → 10正好对应网络结构。
参数初始化
初始化代码:
python
self.params['W1'] = \
0.01 * np.random.randn(input_size, hidden_size)
self.params['W2'] = \
0.01 * np.random.randn(hidden_size, output_size)这里:
python
np.random.randn(...)表示从高斯分布(正态分布)中随机生成数据。
因此:
python
权重 = 随机小数而偏置:
python
np.zeros(...)全部初始化为:
python
0predict():前向传播
python
def predict(self, x):负责执行神经网络的推理过程。
具体流程:
python
a1 = np.dot(x, W1) + b1
z1 = sigmoid(a1)
a2 = np.dot(z1, W2) + b2
y = softmax(a2)对应结构:
python
输入x
↓
W1+b1
↓
Sigmoid
↓
W2+b2
↓
Softmax
↓
输出y最终返回:
python
y即:
python
各类别的预测概率loss():计算损失函数
python
def loss(self, x, t):流程:
python
预测
↓
softmax
↓
交叉熵误差代码:
python
y = self.predict(x)
return cross_entropy_error(y, t)返回值:
python
当前网络的损失函数值accuracy():计算识别精度
python
def accuracy(self, x, t):用于评估模型效果。
首先找到预测概率最大的类别:
python
y = np.argmax(y, axis=1)然后把 One-Hot 标签转回数字:
python
t = np.argmax(t, axis=1)统计:
python
预测正确数量
───────────
样本总数得到:
python
accuracy即识别精度。
grads:保存梯度
与 params 对应,
梯度保存在:
python
grads字典中。
包括:
python
grads['W1']
grads['b1']
grads['W2']
grads['b2']分别对应:
python
W1的梯度
b1的梯度
W2的梯度
b2的梯度并且:
python
梯度形状
=
参数形状例如:
python
grads['W1'].shape结果:
python
(784,100)与:
python
params['W1'].shape完全一致。
numerical_gradient():计算梯度
python
def numerical_gradient(self, x, t):负责计算:
∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L
即损失函数对各参数的梯度。
核心代码:
python
loss_W = lambda W: self.loss(x, t)然后分别计算:
python
grads['W1']
grads['b1']
grads['W2']
grads['b2']的梯度。
最终返回:
python
grads为什么还要写 gradient()
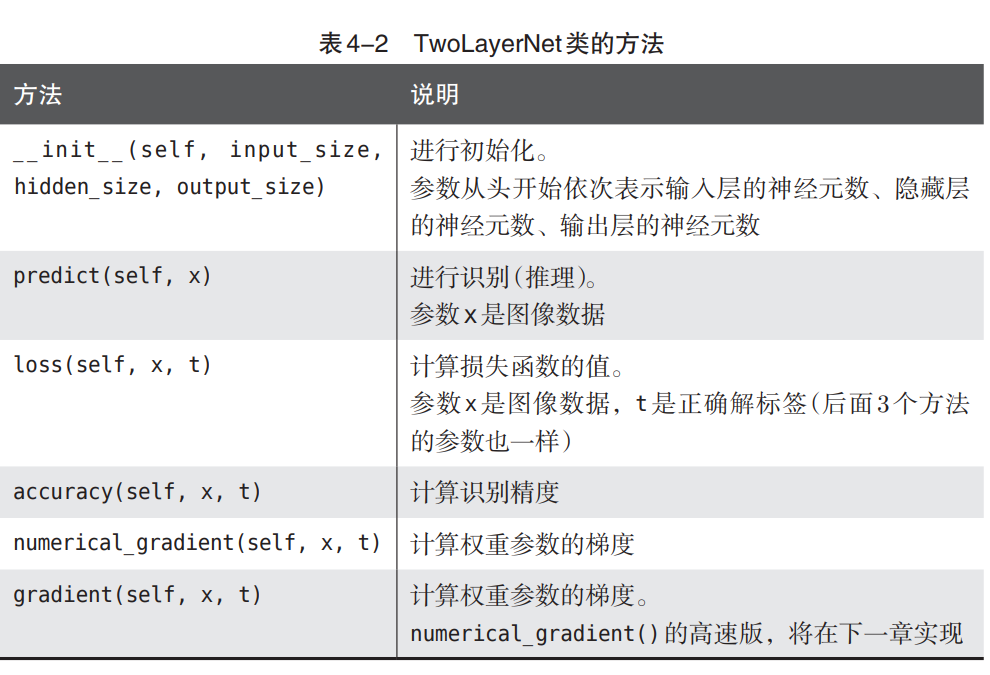
书中表4-2还有一个:
python
gradient(self, x, t)但本章并没有实现。
原因是:
python
numerical_gradient()采用数值微分:
python
精确
但是非常慢而下一章会学习:
误差反向传播(Backpropagation)
利用它可以实现:
python
gradient()特点:
python
结果几乎一样
速度快很多因此:
python
numerical_gradient()主要用于:
- 理解梯度
- 验证反向传播结果
真正训练神经网络时,一般使用后面的:
python
gradient()本节重点
-
TwoLayerNet是一个两层神经网络类。 -
网络结构为:
python输入层 ↓ 隐藏层 ↓ 输出层 -
params保存所有权重和偏置。 -
predict()实现前向传播。 -
loss()计算交叉熵误差。 -
accuracy()计算识别精度。 -
grads保存各参数的梯度。 -
numerical_gradient()使用数值微分计算梯度。 -
下一章将使用误差反向传播实现更高效的
gradient()方法。
4.5.2 mini-batch的实现
这里开始真正训练 TwoLayerNet。
训练流程就是前面总结过的 SGD:
python
随机抽取 Mini-Batch
↓
计算梯度
↓
更新参数
↓
记录损失代码中的核心超参数是:
python
iters_num = 10000
batch_size = 100
learning_rate = 0.1含义分别是:
iters_num:参数更新次数batch_size:每次随机抽取100条数据learning_rate:学习率
每次循环中,先随机抽取 Mini-Batch:
python
batch_mask = np.random.choice(train_size, batch_size)
x_batch = x_train[batch_mask]
t_batch = t_train[batch_mask]然后计算梯度:
python
grad = network.numerical_gradient(x_batch, t_batch)再根据梯度下降法更新参数:
python
for key in ('W1', 'b1', 'W2', 'b2'):
network.params[key] -= learning_rate * grad[key]这一步对应公式:
W = W − η ∂ L ∂ W W = W - \eta \frac{\partial L}{\partial W} W=W−η∂W∂L
最后记录当前 Mini-Batch 的损失:
python
loss = network.loss(x_batch, t_batch)
train_loss_list.append(loss)从图4-11可以看出,随着训练进行,损失函数整体在下降。
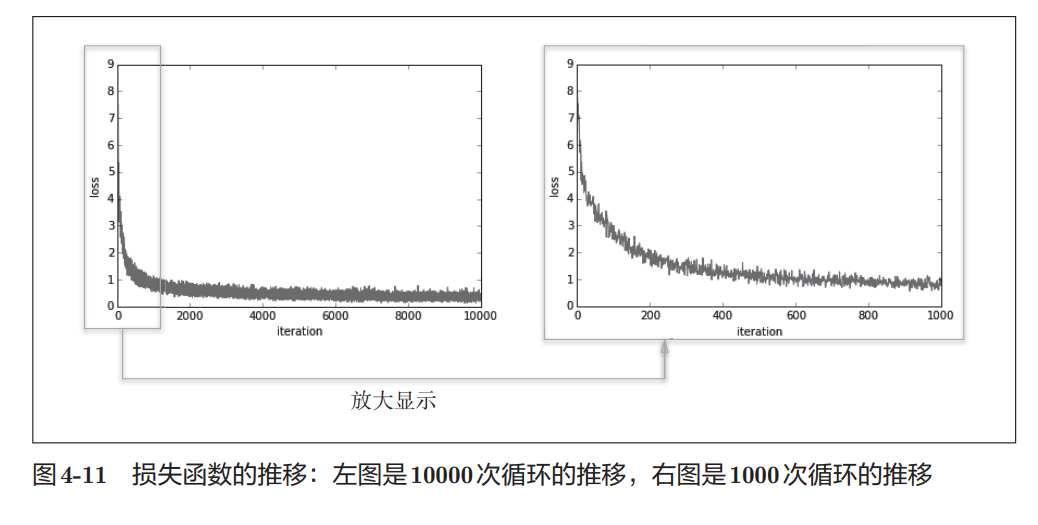
这说明:
网络参数正在逐渐调整到更适合训练数据的位置。
换句话说,神经网络确实在学习。
4.5.3 基于测试数据的评价
只看训练损失下降还不够。
因为训练损失下降只能说明:
模型越来越适应训练数据。
但我们真正关心的是:
模型能不能正确识别没见过的数据。
这就是泛化能力。
如果模型只在训练数据上表现很好,但在测试数据上表现很差,就说明发生了过拟合。
epoch 的含义
这里引入了一个概念:
python
epoch一个 epoch 可以理解为:
所有训练数据大致被使用过一遍。
例如:
python
训练数据:10000条
batch_size:100那么大约需要:
python
100次更新 = 1个epoch在代码中:
python
iter_per_epoch = max(train_size / batch_size, 1)表示每经过多少次迭代,就算一个 epoch。
为什么按 epoch 记录准确率
每次更新都计算训练集和测试集准确率,开销太大。
所以代码选择:
python
if i % iter_per_epoch == 0:也就是每经过一个 epoch,再计算一次:
python
train_acc = network.accuracy(x_train, t_train)
test_acc = network.accuracy(x_test, t_test)然后分别记录:
python
train_acc_list.append(train_acc)
test_acc_list.append(test_acc)这样可以观察模型在训练集和测试集上的整体表现。
如何判断是否过拟合
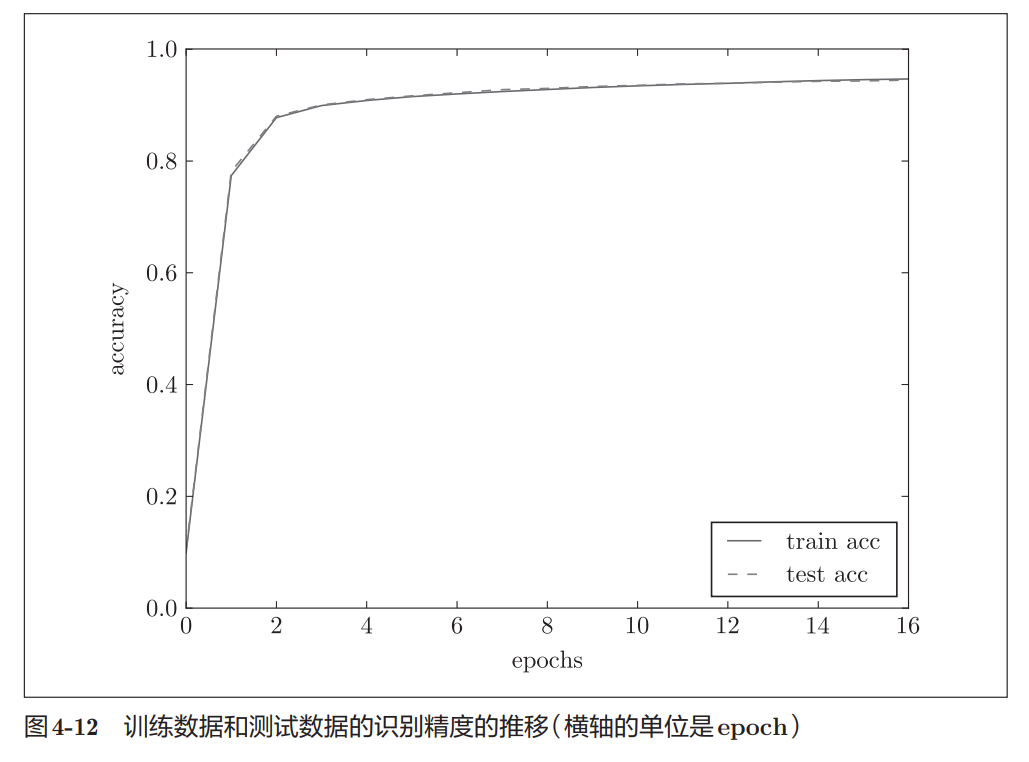
图4-12中:
- 实线:训练集准确率
- 虚线:测试集准确率
可以看到两条线都在上升,而且基本重合。
这说明:
模型不仅在训练数据上表现变好,在测试数据上也同步变好。
因此这次训练没有明显过拟合。
如果发生过拟合,通常会看到:
python
训练集准确率继续上升
测试集准确率停滞甚至下降也就是两条曲线逐渐拉开。
本节重点
- Mini-Batch 学习每次只随机抽取一小批数据训练。
- SGD 的核心流程是:抽样、算梯度、更新参数。
- 损失函数下降,说明模型正在学习。
- 只看训练损失不够,还要观察测试集表现。
epoch表示训练数据大致被使用过一遍。- 训练集准确率和测试集准确率都提高,说明模型具备一定泛化能力。
- 如果训练集表现好、测试集表现差,就说明可能发生过拟合。
4.6 小结
本章正式介绍了神经网络的学习过程。
神经网络学习的目标并不是直接提高识别率,而是通过不断调整权重和偏置,使损失函数的值持续减小。为了实现这一目标,本章引入了损失函数、梯度、梯度下降法等重要概念,并最终实现了一个能够在 MNIST 数据集上进行学习的两层神经网络。
从整体流程来看,神经网络学习的核心步骤为:
python
训练数据
↓
计算损失函数
↓
计算梯度
↓
更新参数
↓
重复迭代随着不断迭代,损失函数逐渐减小,模型的识别能力也不断提高。
本章重点
数据集划分
- 机器学习中的数据通常分为:
- 训练数据(Training Data)
- 测试数据(Test Data)
- 使用训练数据学习参数。
- 使用测试数据评估模型泛化能力。
泛化能力
- 泛化能力指模型处理未知数据的能力。
- 机器学习的最终目标不是记住训练数据,而是正确处理从未见过的新数据。
- 过拟合会导致训练集表现很好,但测试集表现较差。
损失函数
- 损失函数用于衡量模型预测结果与真实结果之间的差距。
- 神经网络学习的目标是:
L o s s → M i n Loss \rightarrow Min Loss→Min
- 常见损失函数:
- 均方误差(MSE)
- 交叉熵误差(Cross Entropy Error)
Mini-Batch 学习
- 每次不使用全部训练数据。
- 从训练集中随机抽取一小部分数据进行训练。
python
训练集
↓
随机抽样
↓
Mini-Batch- 这样能够大幅降低计算量,提高训练效率。
数值微分
- 导数表示函数在某一点的变化率。
- 数值微分使用有限差分近似求导:
f ( x + h ) − f ( x − h ) 2 h \frac{f(x+h)-f(x-h)}{2h} 2hf(x+h)−f(x−h)
- 实现简单,但计算效率较低。
梯度
梯度是所有偏导数构成的向量:
\\nabla f \\left( \\frac{\\partial f}{\\partial x_0}, \\frac{\\partial f}{\\partial x_1}, ... \\right)
梯度表示:
函数值增长最快的方向。
负梯度表示:
函数值下降最快的方向。
梯度下降法
参数更新公式:
W = W − η ∂ L ∂ W W=W-\eta\frac{\partial L}{\partial W} W=W−η∂W∂L
其中:
- W W W:参数
- η \eta η:学习率
- ∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L:梯度
梯度下降法是神经网络最基础的优化方法。
神经网络中的梯度
神经网络学习时,需要计算:
∂ L ∂ W \frac{\partial L}{\partial W} ∂W∂L
即:
损失函数关于权重参数的梯度。
梯度告诉我们:
- 哪个参数应该增大
- 哪个参数应该减小
- 应该调整多少
TwoLayerNet
本章实现了第一个完整的可学习神经网络:
python
输入层
↓
隐藏层
↓
输出层主要实现了:
predict():前向传播loss():计算损失accuracy():计算精度numerical_gradient():计算梯度
SGD(随机梯度下降)
完整学习流程:
python
随机抽取 Mini-Batch
↓
计算损失函数
↓
计算梯度
↓
更新参数
↓
重复执行这就是随机梯度下降法(SGD)。
学习效果评估
评价神经网络时需要同时观察:
- 训练集准确率(Train Accuracy)
- 测试集准确率(Test Accuracy)
如果:
python
Train Acc ↑
Test Acc ↑说明模型学习正常。
如果:
python
Train Acc ↑
Test Acc ↓则可能发生过拟合。
一句话总结本章
本章建立了神经网络学习的完整框架:利用损失函数衡量误差,通过数值微分求梯度,再使用梯度下降法不断更新参数,最终实现了基于 Mini-Batch SGD 的两层神经网络训练流程。