代码采用MATLAB编写,例程可直接运行并得到文中的结果。包运行成功,并可作为学习非线性状态估计、自适应滤波及导航定位算法开发的基础参考案例。
文章简介
在实际导航、定位、目标跟踪以及无人系统状态估计问题中,扩展卡尔曼滤波(Extended Kalman Filter,EKF)是处理非线性系统最常用的滤波方法之一。然而,经典EKF通常假设观测噪声统计特性已知且保持不变,当传感器性能波动、外界干扰增强或测量环境发生变化时,固定观测噪声协方差矩阵往往难以准确反映实际情况,从而导致滤波精度下降甚至出现估计发散。
针对这一问题,自适应扩展卡尔曼滤波(AEKF)通过在线调整观测噪声协方差矩阵,使滤波器能够根据当前观测残差动态改变对测量信息的信任程度,从而提高系统对噪声变化和异常测量的适应能力。
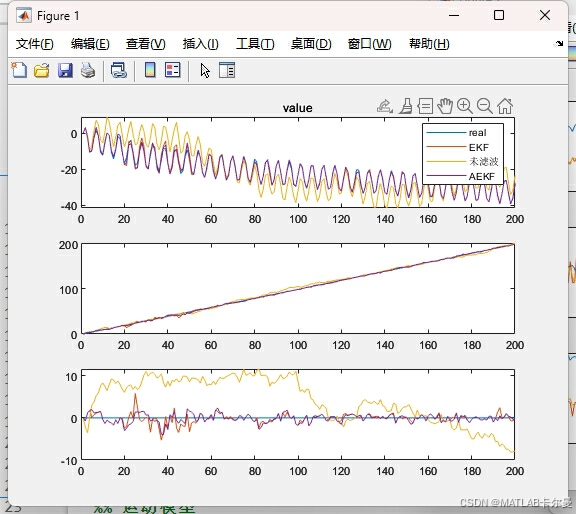
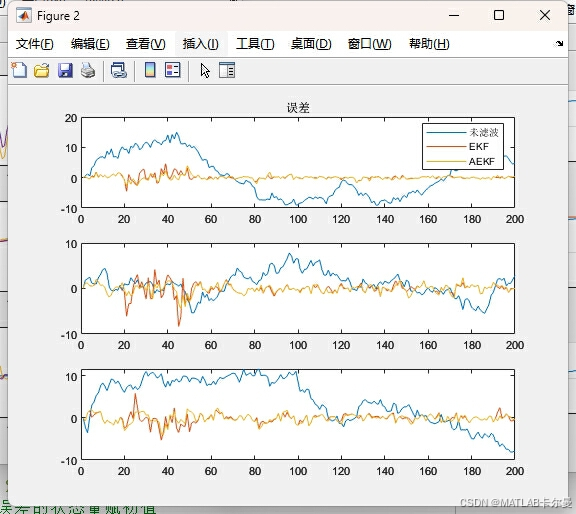
本文基于一个典型的三维非线性动态系统,详细实现并对比了经典EKF与 自适应 R 的 A E K F 自适应R的AEKF 自适应R的AEKF两种算法。为了更加直观地体现自适应机制的作用,仿真中特意设置了观测噪声突变区间,通过观察滤波曲线、估计误差以及误差累积分布函数(CDF)等指标,分析两种算法在非平稳噪声环境下的性能差异。
本文主要内容包括:
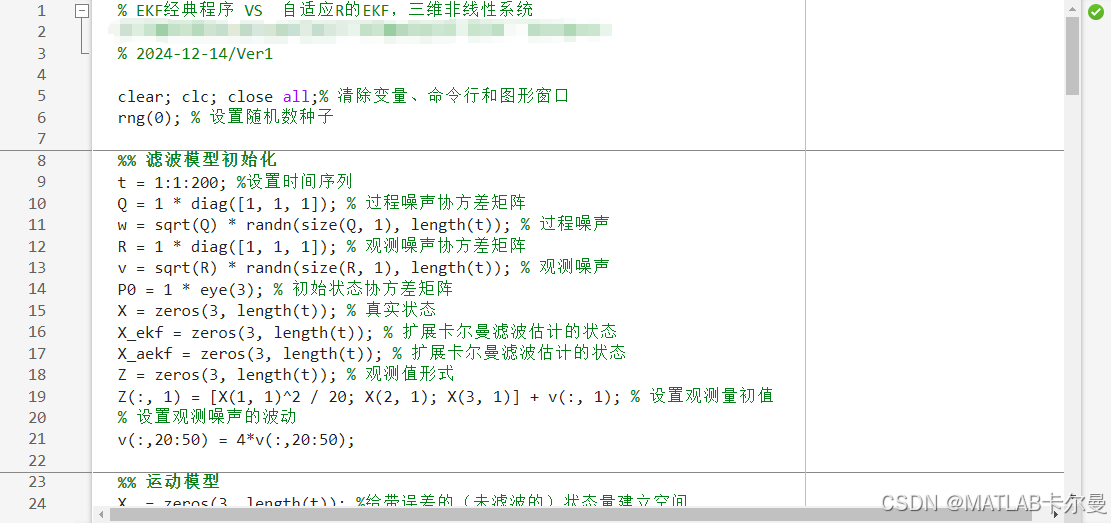
- 三维非线性状态空间模型构建;
- EKF状态预测与量测更新过程实现;
- 非线性系统雅可比矩阵推导与编程实现;
- 基于残差判据的自适应观测噪声协方差调整策略;
- EKF与AEKF滤波性能对比分析;
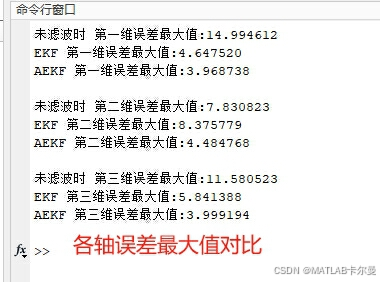
代码运行结果
源代码和更多讲解
- Sage-Husa自适应滤波
- 强跟踪滤波(STF)
- 最大相关熵滤波(MCCKF)
- 实际GNSS/INS组合导航算法等方向的定制,可通过文末卡片联系我: