在工厂、化工厂、电力站等高风险场所,安全管理人员最头疼的问题之一就是:如何精确判断人员是否进入了危险区域?
传统的电子围栏大多只能画一个二维的"圈"------在监控屏幕上圈出一片矩形区域,人一旦踏入就报警。但这种平面围栏有一个致命的缺陷:它分不清人是在地面上,还是在高处的脚手架上。
举个例子:一个反应釜周围5米划为警戒区。工人站在地面维护设备,这是正常工作;但如果他爬上釜顶的检修平台,可能已经处于有毒气体泄漏的高度风险区。平面围栏无法区分这两种情况,要么漏报,要么频繁误报。
要解决这个问题,安全围栏必须从"平面"走向"立体"------也就是增加**高度(Z轴)**维度。
为什么传统电子围栏做不到立体管控?
要实现立体围栏,定位系统必须能输出精确的三维坐标(X, Y, Z)。然而,大多数室内定位技术存在先天不足:
-
UWB/蓝牙/WiFi:依赖信号强度或到达时间,垂直方向精度通常超过1米,无法精确判断人员是否"上了台阶"或"越过2米警戒线"。
-
激光/视觉SLAM:能构建三维地图,但设备昂贵、算法复杂,且主要用于机器人导航,不适合大规模人员佩戴。
-
GPS/北斗:室内无信号,且民用精度也不支持厘米级垂直分辨。
真正的突破口,来自于毫米级室内绝对定位技术。
毫米级三维定位:让电子围栏"长"出高度
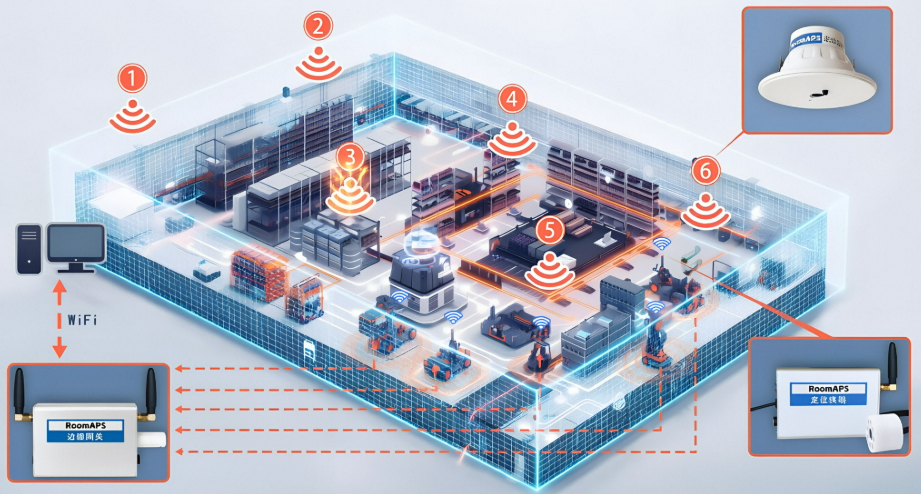
基于光同步超声波的RoomAPS系统,能够实时输出每个定位标签的精确三维坐标(X, Y, Z) ,平面精度±4毫米,垂直精度同样达到毫米级。这意味着,安全管理者可以在空间任意划出一个立体盒子------比如"以设备中心为原点,半径5米,高度3米以内为一级警戒区,3米以上为禁区"。
当工人佩戴的定位终端进入这个立体区域,系统立即识别出它的X、Y、Z三个值是否同时突破边界。如果工人站在地面(Z≈0),即使靠近设备也不会触发警报;如果他爬上设备顶部的平台(Z=3.5米),系统马上判断为"进入禁区",通过边缘网关向中控室发送报警,并可联动声光报警器或切断设备电源。
这种基于Z轴的分层管控,彻底解决了传统平面围栏"一竿子打死"的痛点。
不只是人员:设备、车辆、无人机也能纳入立体围栏
立体电子围栏的应用远不止人员定位。
-
AGV与叉车:在立体仓库中,某些区域对AGV的行驶高度有限制(例如升降货叉必须低于某值)。系统实时监测AGV上定位终端的Z坐标,一旦货叉抬升过高进入禁行区,自动降速或停车。
-
室内无人机:为无人机设置飞行高度上限,超出Z值立即触发返航或降落,避免撞到顶部管道或灯具。
-
大型吊装作业:在吊装区域周围划出立体警戒区,设备或人员进入该空间即报警,防止碰撞事故。
边缘网关:报警信息零延迟上云
立体围栏的有效性,依赖于实时数据与快速响应。RoomAPS的边缘网关扮演了"数据中转站"的角色:
-
它收集场内所有定位终端的三维坐标,通过WiFi以UDP包形式(支持JSON格式)推送到企业服务器。
-
服务器上的安全软件解析坐标后,与预设的立体围栏边界进行比对,一旦触发立即输出报警。
-
整个链条延迟可控制在几十毫秒内,实现真正的"即时预警"。
部署简单,不破坏现有环境
很多人担心,部署一套立体定位系统会不会很麻烦?RoomAPS的基站可以像吸顶灯一样安装在天花板上或墙壁不同高度,通过自动标定功能------拿着定位终端走两圈------系统自动完成所有基站的坐标标注。无需停产改造,不影响日常作业。
让安全围栏从"大概齐"到"精准控"
安全生产的红线,从来不能靠"大概"来守。从平面到立体,从米级到毫米级,室内定位技术的进步正在重新定义安全管理的精度。
当电子围栏拥有了Z轴的"眼睛",管理者就能真正区分:谁在安全区,谁在危险区;谁在地上,谁在高空。这不仅是技术的升级,更是对生命的负责。
RoomAPS毫米级立体定位,让每一道安全围栏都清晰、可靠、不留死角。