引言:物理 AI 的风口与控制中枢的缺失
伴随着 COMPUTEX 2026 与 NVIDIA GTC Taipei 2026 大会的正式开幕,"物理 AI(Physical AI)与机器人技术"再度成为全球工业界与科技界瞩目的绝对核心。在 NVIDIA 官方公布的最新技术蓝图里,构建下一代"机器人工厂"与数字化供应链的宏大愿景,正依赖于一套清晰的"3台电脑架构":NVIDIA DGX 负责云端的海量基础模型训练,NVIDIA OVX 负责数字孪生与 Omniverse 虚拟模拟,而 NVIDIA AGX(即 Jetson 边缘计算平台)则直接作为执行端,部署在物理世界的智能机器人与数字化产线车间。
然而,在这一宏大生态的落地推进中,整个工业界也面临着一个不可回避的底层技术挑战:NVIDIA Jetson 平台凭借其强大的 GPU 算力,完美解决了机器人的高级边缘 AI 算法、视觉识别与路径规划等"大脑"层面的问题;但在实际的工业赛道和具身智能场景中,"大脑"发出的非实时高级指令,必须毫无延迟、微秒不差地传递给物理世界的执行机构(如机械臂、人形机器人关节、伺服电机与各类 I/O 设备)。
这种对高确定性、硬实时通信的极致追求,使得工业界公认的 EtherCAT 工业现场总线 成为了该生态链中不可或缺的"中枢神经"。如何打破边缘算力与硬实时总线之间的系统壁垒,成为了衡量 NVIDIA 机器人生态落地成熟度的关键指标。作为国内长期深耕工业实时通信与高精度运动控制领域的一线企业,盟通科技立足于全球智能工业生态链的前沿视野,通过对 NVIDIA 边缘计算技术底座的深度透视,探寻与分析 EtherCAT 技术方案是否在物理 AI 时代仍具有不可替代的硬核价值。
第一章:英伟达官方生态的选择------锁定 Preferred 席位
在评估第三方技术方案如何与 NVIDIA Jetson 平台进行深度融合时,最严谨且无可辩驳的证据,莫过于 NVIDIA 官方的技术评定与全球生态名录。
根据 NVIDIA 官方嵌入式与机器人合作伙伴名录(NVIDIA Jetson Ecosystem Official Portal) 资料显示,在众多提供运动控制与实时操作系统的供应商中,acontis 已被官方正式评定为高级别的 NPN Partner Type: Preferred(首选合作伙伴)。
在官方公示的挂牌详情中,NVIDIA 官方对 acontis 方案给出了极高的技术定性与谢词:
"Optimized for NVIDIA Jetson™, the acontis EtherCAT® Master software enables ultra-low-latency, deterministic motion control for robotics, humanoids, and physical AI."
(译文:专为 NVIDIA Jetson™ 进行深度优化,acontis EtherCAT® 主站软件能够为机器人、人形机器人以及物理 AI 提供超低延迟、确定性的运动控制。)
官方名录同时明确指出,acontis 的方案不仅完美支持当前主流的 Jetson AGX Orin、Orin NX、Orin Nano 等全系列边缘计算模块,更全面覆盖并支持了 NVIDIA 针对未来下一代自主控制平台推出的超级芯片 AGX Thor。这种长期的、覆盖全线硬件的技术协同与挂牌认可,从官方视角直接锁定了 acontis(代表产品 EC-Master)在 NVIDIA 边缘 AI 生态圈中作为硬实时 EtherCAT 通信核心提供方的稳固地位。
第二章:从准入到极致------AGX Thor平台上的三级性能调优阶梯
在 NVIDIA 勾勒的物理 AI 蓝图里,面向高端 general robotics 领域推出的下一代超级计算平台 NVIDIA Jetson AGX Thor 备受瞩目,其提供了高达数倍的 AI 算力飞跃。然而,如何将如此庞大的边缘算力转化为高效、动态且同步的机器人肢体动作,对控制软件的硬实时能力和 CPU 资源消耗提出了极为苛刻的挑战。
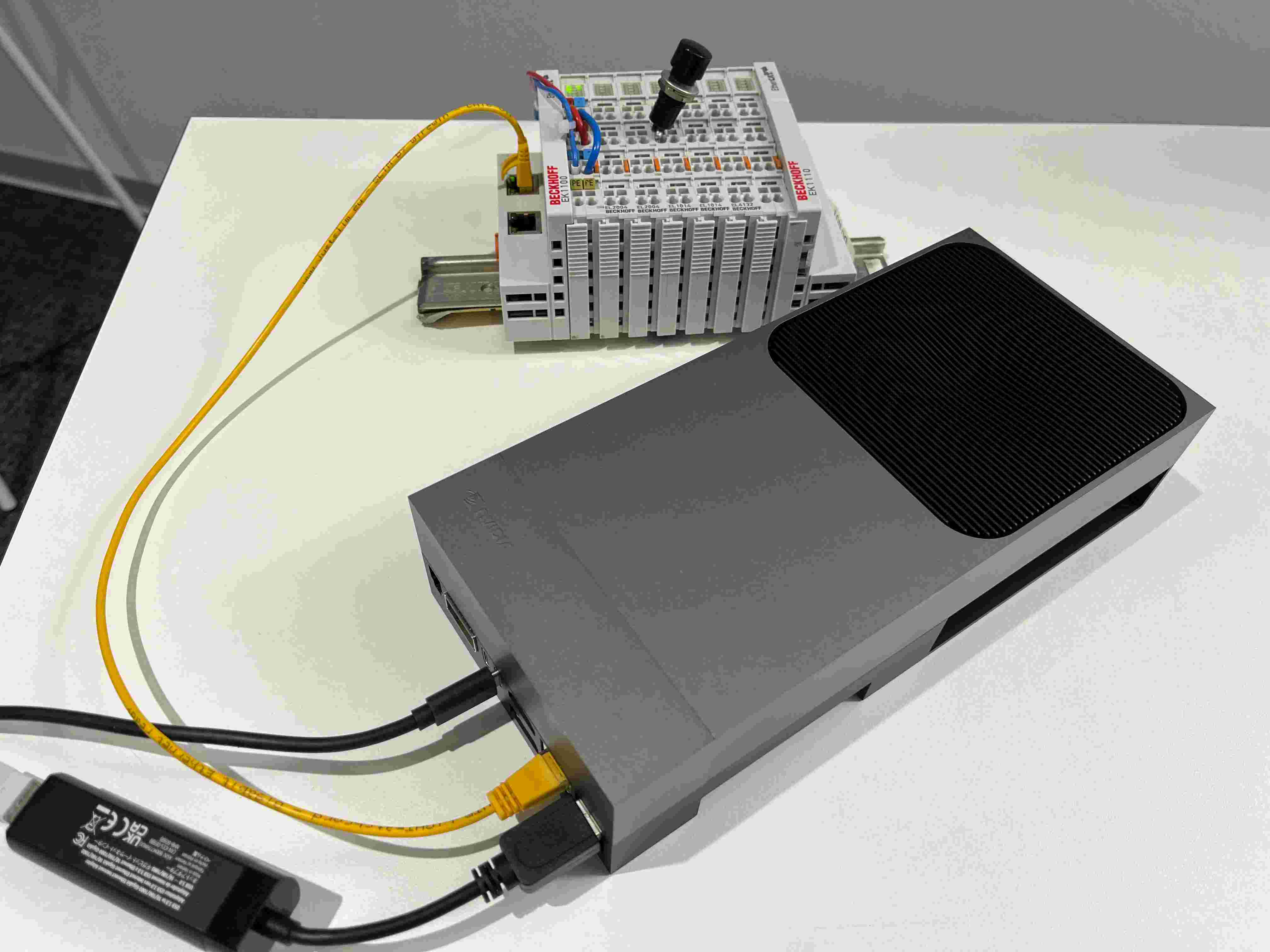
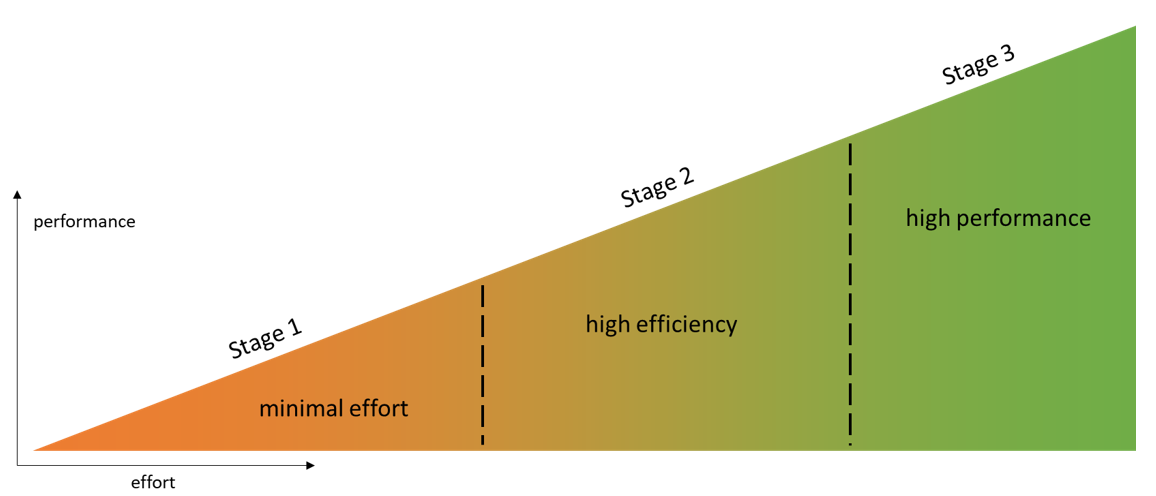
为了量化评估软硬件融合的真实性能表现,acontis 在搭载 JetPack 7.0(采用 SMP PREEMPT 内核)的 NVIDIA Jetson AGX Thor 开发套件上,连接 Beckhoff 等标准工业总线 SubDevices 进行了详尽的对比测试。实验表明,通过 acontis EC-Master 提供的三级性能调优阶梯,系统可以根据不同的工业应用需求,层层递进地将硬实时控制性能推向极限:
Stage 1:轻量准入------低开发门槛的通用通信
-
架构与配置:系统完全基于 NVIDIA 官方标准 Linux 环境,不进行任何额外的内核裁剪。在 acontis 软件侧,EC-Master 协议栈通过 generic SOCK_RAW 网络接口模块直接对接 Linux 标准网络堆栈与驱动,完成与底层硬件 MAC 数据的交换。
-
量化性能表现 :在 1 ms(1000 µs)的指定控制周期下,得益于 Thor 芯片的强劲计算能力,EC-Master 展现出了惊人的 CPU 执行效率,整个协议栈的作业耗时仅为 10.4 µs,换算为 CPU 负载仅占 1.04%。
-
局限性分析 :由于此时缺乏底层的内核级实时配置,系统调度存在较高的 Timing 波动。测试记录显示,此时系统循环抖动(Jitter)高达±330 µs,且由于无形的多层软件堆栈消耗,控制器周期性延迟图谱中存在明显的峰值(Peaks)。这意味着该阶段虽然平均表现优异、开发门槛极低,但对于高精度多轴同步控制而言,仍存在 frame 丢失或系统稳定性降级的隐患,更适用于 5 ms 以上长周期的常规工业自动化场景。
Stage 2:内核级飞跃------利用核心隔离提升确定性
-
架构与配置 :该阶段引入了 Linux 内核级别的实时优化。开发人员通过安装并激活 NVIDIA 官方提供的 RT 内核包(nvidia-l4t-rt-kernel 等系列组件),配合修改
extlinux.conf配置文件,加入isolcpus=3参数,将系统的第 3 号 CPU 核心进行专属隔离,完全闭环分配给 EtherCAT 通信线程 。同时,将所有 CPU 核心的 scaling_governor 锁死在性能模式(performance)以释放最大计算潜能。在启动应用时,通过-a 3指令锁定 CPU 亲和性(Affinity)。 -
量化性能表现 :在绑定独立 CPU 核心运行后,EtherCAT 通信完全独立于系统的其他进程。相比于 Stage 1,系统循环抖动直接削减了半数以上,控制在 ±125 µs左右。
-
局限性分析:尽管确定性获得了质的飞跃,但由于底层依然在使用 SOCK_RAW 共享标准 Linux 网卡驱动,系统内残存的某些延迟峰值依然无法被彻底消除。这一阶段的性能表现,非常适合那些不需要严格启用 Distributed Clocks(分布式时钟 DC)纳米级同步、但要求控制周期稳定在 1 ms 附近的常规机器人方案。
Stage 3:硬实时终极性能------专属驱动带来的极速通信
-
架构与配置 :这是迈向硬实时控制的核心阶段。为了彻底阻断标准网络堆栈带来的不可控延迟,开发人员通过黑名单机制完全卸载了 Linux 默认的网卡驱动,取而代之的是 acontis 专为该硬件板载 Realtek 网络控制器开发并严格测试的专属实时以太网驱动(如 -rtl8169) 。在此基础上,系统通过加载开源 GPL 授权的
atemsys内核模块,赋予了用户空间(User Space)驱动直接越过繁琐软件层、透传访问底层硬件 MAC 寄存器的权限。 -
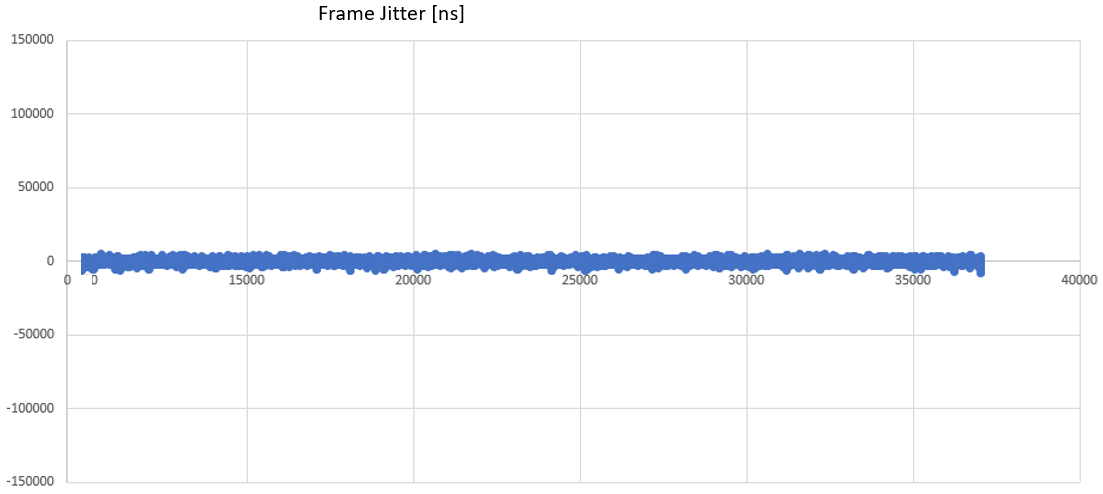
量化性能表现 :测试结果展现了极其震撼的技术代差:在 1 ms 周期下,系统循环抖动(Jitter)骤降至不可思议的 ±6 µs 级别 !同时,EC-Master 协议栈的执行时间仅为 13.8 µs,整体 CPU 负载仅约 1.38% 。更为关键的是,在其长期的循环帧延迟图(CtlErr 记录)中,所有的延迟巨峰被完全抹平,呈现出绝对平滑、稳定的直线特征。
-
极限频率压榨 :为了测试该架构的抗压上限,acontis 将 EtherCAT 控制周期进一步压缩 4 倍,挑战 250 µs(4 kHz) 的超高频同步周期。实验数据证实,系统在 250 µs 极值下表现依然极度稳定,抖动无任何恶化,EC-Master 的单次循环处理耗时恒定在 13.5 µs 左右,对应 CPU 占用仅为 5.4%。
这组硬核测试数据无声地证明:仅仅拥有 NVIDIA 顶级的硬件算力是不够的,正是通过 acontis 在 Stage 3 级别提供的硬实时隔离技术,NVIDIA Jetson AGX Thor 才能真正胜任高精密具身智能、多轴联动关节的高频控制需求,把"算力大饼"变成可落地执行的"钢铁身躯"。
第三章:抗干扰与高容灾------边缘侧高负载下的"绝对清醒"
在实际的工业智能化场景或高级具身智能应用中,部署在机器人边缘侧的电脑往往需要面临极其复杂的"多任务并行"挑战。例如,在 NVIDIA GTC Taipei 2026 大会上广泛探讨的工业产线检测、多轴智能爪(OpenClaw 平台)等实战案例中,边缘计算设备既要在后台高强度运行复杂的 AI 视觉识别算法和大模型推理,同时还要通过标准网络接口进行高吞吐量的数据通信与上报。
为了验证在真实高负载环境下系统的抗干扰能力,acontis 选择了 NVIDIA Jetson 家族中主打高性能与紧凑型性价比的 NVIDIA Jetson Orin Nano 开发套件(基于 JetPack 6.0,采用 Linux 36 内核环境)进行了严苛的"极限抗噪测试"。
在这项测试中,技术人员专门引入了外部干扰源以模拟极限工业工况:
-
CPU 压力灌注 :使用 Linux 系统下的专业压测工具
stress-ng,将其绑定至除 EtherCAT 专属核心之外的所有 CPU 核心上,高强度模拟高并发的 AI 算法运行、数据计算与 I/O 频繁读写,使边缘端硬件资源逼近极限。 -
网络流量轰炸 :利用网络测试工具
nping,在通过 USB 扩展的第二路标准 TCP/IP 以太网端口上,以极高的速率疯狂灌入海量大包数据,高强度压迫 Linux 标准网络协议栈。
在这样混乱、高压的极限边缘计算环境下,两组不同的底层驱动架构展现出了截然相反的命运:
-
标准网络驱动(SOCK_RAW)的崩溃隐患:
在未配置硬件直通优化的环境下,尽管系统整体的平均延迟指标看似可以接受,但随着系统后台大模型算法在跑、网络流量在传,Linux 未经隔离的网络堆栈和驱动代码开始出现严重的调度冲突。测试的循环延迟图谱上高频次地爆发出了极其恐怖的延迟巨峰(Latency Peaks),任务单次执行时间飙升。在实际工业生产中,这种延迟峰值会导致 EtherCAT 周期帧出现不可预测的意外丢失,直接引发通信断连、网络报错甚至机械臂和机器人因同步失效而失控跳闸。
-
acontis 实时网卡驱动与 atemsys 的"绝对隔离":
与此形成鲜明对比的是,当切换到 acontis 专为 Jetson Orin 嵌入式以太网控制器(Realtek 8169)开发的实时网卡驱动并加载
atemsys内核模块后,整套系统展现出了高规格的容灾能力。由于该驱动运行在用户空间(User Space)且直接透传控制网卡的 MAC 硬件层,从而彻底绕过了拥堵的标准 Linux 网络堆栈。实验数据表明,即便在外部
stress-ng与nping双重轰炸的极端工况下,系统将 EtherCAT 周期时间强行压缩 4 倍、提升至 250 µs(4 kHz) 的极限超高频状态,acontis 方案依然几乎完全抹平了所有的延迟峰值,Jitter 运行图谱呈现出极度平滑的确定性直线。EC-Master 的单次循环 CPU 平均负载依然稳定在约 10 µs,整体耗时无任何恶化,保障了全线多轴伺服电机的绝对安全。
这组极限对比测试再次向行业指明了硬核价值所在:AI 算力越强,边缘调度的业务越复杂,系统底层就越需要 acontis 这种能够"在混乱高压中保持绝对清醒与物理隔离"的硬实时通信盾牌。
第四章:面向移动与具身智能------打通最后一公里
在理清了底层的算力协同与实时隔离性能后,NVIDIA 机器人生态全球分析的目光自然延伸到了应用层。针对 GTC 台北大会所揭示的未来人形机器人(Humanoids)与高级移动机器人(Robotics)等日益显著的"无线化、高集成、快速部署"的研发趋势,acontis 并非仅仅提供一个底层的通信协议栈,而是通过一套矩阵式的软硬件工具链,为具身智能打通了从底层通信到上层控制的闭环:
1. 突破线缆束缚的无线远程诊断技术(EC-Engineer Web)
由于人形机器人和自动化 AMR 属于移动性极强的设备,开发人员和现场工程师不可能在移动中的机器人身上插满显示器、键盘和网线进行实时调试。
为此,acontis 创新推出了基于 Web 架构(基于 ASP.NET Core 开发)的 EC-Engineer Web 配置与诊断工具。在该体系下,EC-Master 与实时内核一同运行在机器人体内的 NVIDIA Jetson AGX Orin 或 Thor 边缘端电脑上。现场工程师只需要通过 Wi-Fi 无线网络,即可使用任何一台笔记本、平板甚至移动端标准的浏览器(如 Chrome、Safari 等),远程直连机器人主站。在无需中断控制进程的前提下,即可实现:
-
远程监控 EtherCAT 整个控制网络的状态、各 SubDevices 的实时健康度;
-
在线进行变量强制(Force)、内存占用监控以及查看 CoE 对象字典;
-
利用内置的"错位分析器(Mismatch Analyzer)"秒级识别实际硬件连接与 ENI(配置文件)之间的偏差,极大提升了人形机器人关节电机的离线研发与在线调试效率。
2. 从通信到运动控制的一站式闭环(EC-Motion Advanced)
强大的物理 AI 最终要落地为精准、丝滑的关节动作。为了让机器人开发团队将全部精力聚焦于高级 AI 行为层,acontis 配套提供了专用的运动控制功能组件 EC-Motion Advanced。
作为可以直接无缝嵌入到 EC-Master 应用层中的核心库,EC-Motion 严格遵循了 ETG.6010 实施指南,全面支持工业标准的 CiA 402 电机驱动行规。开发者通过简单的 API 调用,即可一站式实现:
-
CSP(循环同步位置模式) 与 CSV(循环同步速度模式) 下的多轴关节高精度控制;
-
自动计算并规划电机运行轨迹,实现微秒级的关节联动同步。
通过这一套"EC-Master + EC-Motion Advanced + EC-Engineer Web"的完整组合拳,即便是不熟悉工业总线通信的 AI 算法工程师,也能通过英伟达生态在几天内快速让一台复杂的机器人"关节转起来、走得稳",将过去行业动辄数月的系统联调和通信适配周期缩短至了"天"的量级。
结语:算力与硬实时的双向奔赴
在 NVIDIA 勾勒的物理 AI 与数字化智能工厂的新纪元中,行业见证了一场软硬件生态的"双向奔赴"。NVIDIA Jetson 平台凭借惊人的边缘算力,为全球机器人与具身智能提供了思考的"大脑";而 acontis(代表产品 EC-Master)则以无可替代的底层硬实时驱动隔离技术与深厚的 EtherCAT 技术底蕴,成为了将算力稳稳落地到物理世界、精准驱动四肢关节的"中枢神经"。这种不卑不亢、强强联合的技术互补,正在重塑智能工业生态链的底座。
作为 acontis 在中国大陆、中国香港、中国澳门以及中国台湾的独家代理商与首席合作伙伴 ,盟通科技长期深耕于工业实时通信与高精度运动控制领域。依托 acontis 官方评定的 NVIDIA Jetson 顶尖级生态资源,盟通科技在国内拥有丰富的在地化应用经验与技术专家团队,能够为亚太地区的具身智能研发团队、高端机器人及智能制造企业提供全方位、本土化的 EtherCAT 主站一站式方案支持与技术保障,助力中国智慧加速驶向全球物理 AI 的最前沿。