🔥大奇个人主页 :https://blog.csdn.net/m0_75192474?type=blog
⚡本文所属专栏:https://blog.csdn.net/m0_75192474/category_13131150.html
下载安装包和依赖
wget https://download.qt.io/archive/qt/5.15/5.15.3/single/qt-everywhere-opensource-src-5.15.3.tar.xz
tar -xf qt-everywhere-opensource-src-5.15.3.tar.xz解压好之后大概3.3G,确保有充足的内存空间
配置安装脚本并编译
安装依赖
sudo apt update
sudo apt install build-essential libssl-dev libxcb-xinerama0-dev libfontconfig1-dev libfreetype6-dev libx11-dev libxext-dev libxfixes-dev libxi-dev libxrender-dev libxkbcommon-dev libxkbcommon-x11-dev
sudo apt install -y \
libxcb1-dev \
libxcb-xinerama0-dev \
libxcb-randr0-dev \
libxcb-shape0-dev \
libxcb-sync-dev \
libxcb-xfixes0-dev \
libxcb-xkb-dev \
libxcb-icccm4-dev \
libxcb-image0-dev \
libxcb-keysyms1-dev \
libxcb-render-util0-dev \
libxkbcommon-x11-dev \
libx11-xcb-dev \
libgl1-mesa-dev依赖安装成功后进入包目录
cd qt-everywhere-opensource-src-5.15.3现在编译会出现问题,因此找到路径**qtbase/src/corelib/text/qbytearraymatcher.h文件,并添加头文件#include <limits.h>**
接下执行
mkdir build
cd build执行配置脚本
../configure -prefix /opt/qt5.15.3 -opensource -confirm-license -release -shared -nomake examples -nomake tests -xcb -xkbcommon -c++std c++17 -skip qtdeclarative| 参数 | 作用 |
|---|---|
../configure |
调用 Qt 源码的配置脚本(必须在新建的编译目录中执行,不能在源码根目录直接运行) |
-prefix /opt/qt5.15.3 |
编译完成后 Qt 的安装路径,所有库、头文件、工具都会安装到这里 |
-opensource |
使用 Qt 开源版本 |
-confirm-license |
自动确认接受开源协议 |
-release |
编译发行版(无调试信息,体积小、运行快) |
-shared |
编译动态库(.so 文件) |
-nomake examples |
不编译示例代码(大幅缩短编译时间,节省空间) |
-nomake tests |
不编译测试用例(同上,加速编译) |
-xcb |
启用 Linux X11 窗口系统支持(桌面程序必须开启) |
-xkbcommon |
启用键盘输入支持(Linux 输入法 / 键盘依赖) |
-c++std c++17 |
指定使用 C++17 标准编译 |
-skip qtdeclarative |
跳过 Qt QML/Quick 模块(因为只开发传统 Qt Widgets 桌面程序,不需要 QML,跳过可节省大量时间) |
配置成功会在终端输出,说明配置脚本成功
Qt is now configured for building. Just run 'gmake'.
Once everything is built, you must run 'gmake install'.
Qt will be installed into '/opt/Qt5.15.3'.接下来执行编译
make -j$(nproc)
bash
sudo make install以上这两条命令执行后不报错即可
配置环境变量
bash
sudo gedit ~/.bashrc如果没有安装gedit可以执行
bash
sudo apt insatll gedit复制以下内容到末尾
bash
export QTDIR=/opt/qt5.15.3
export PATH=$QTDIR/bin:$PATH
export LD_LIBRARY_PATH=$QTDIR/lib:$LD_LIBRARY_PATH
export QT_PLUGIN_PATH=$QTDIR/plugins:$QT_PLUGIN_PAT保存后执行
bash
source ~/.bashrc
bash
qmake -v输出以下内容说明成功

安装qtcreator11.0
点击可直接下载
安装的时候如不想注册账号,断网即可
qtcreator配置编译套件
点击下载好的.run文件,打开Qt Creater,按照图示打开
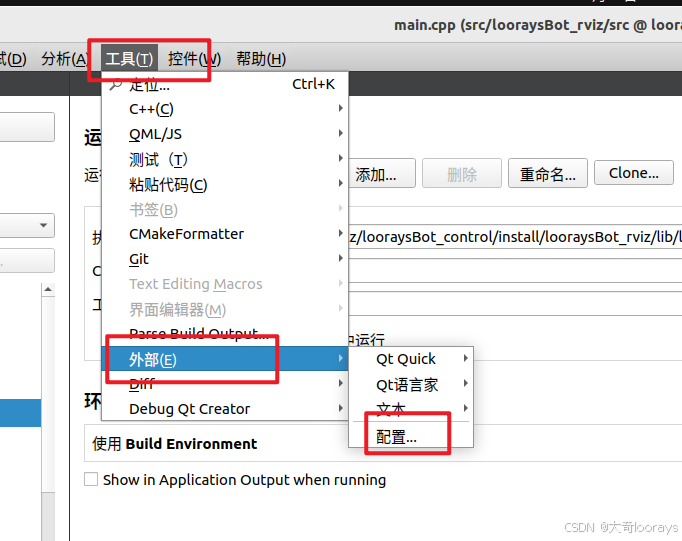
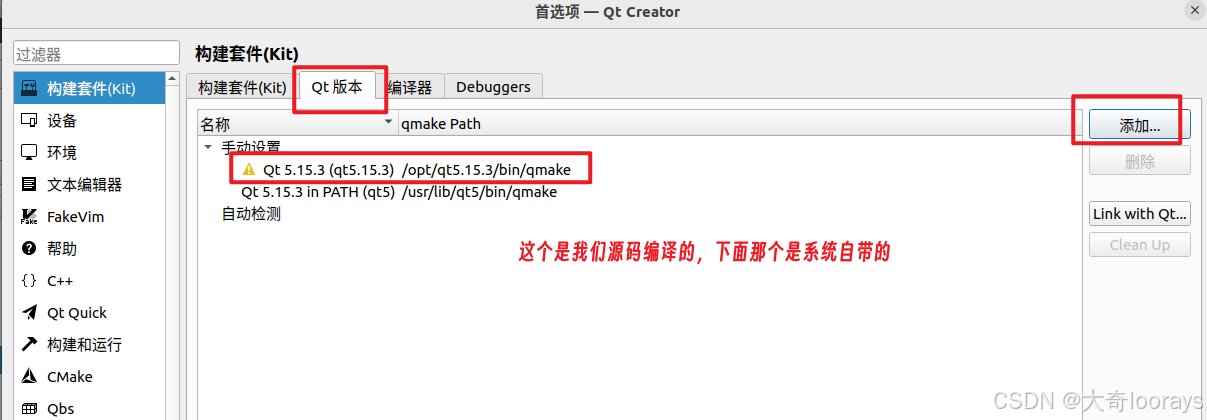
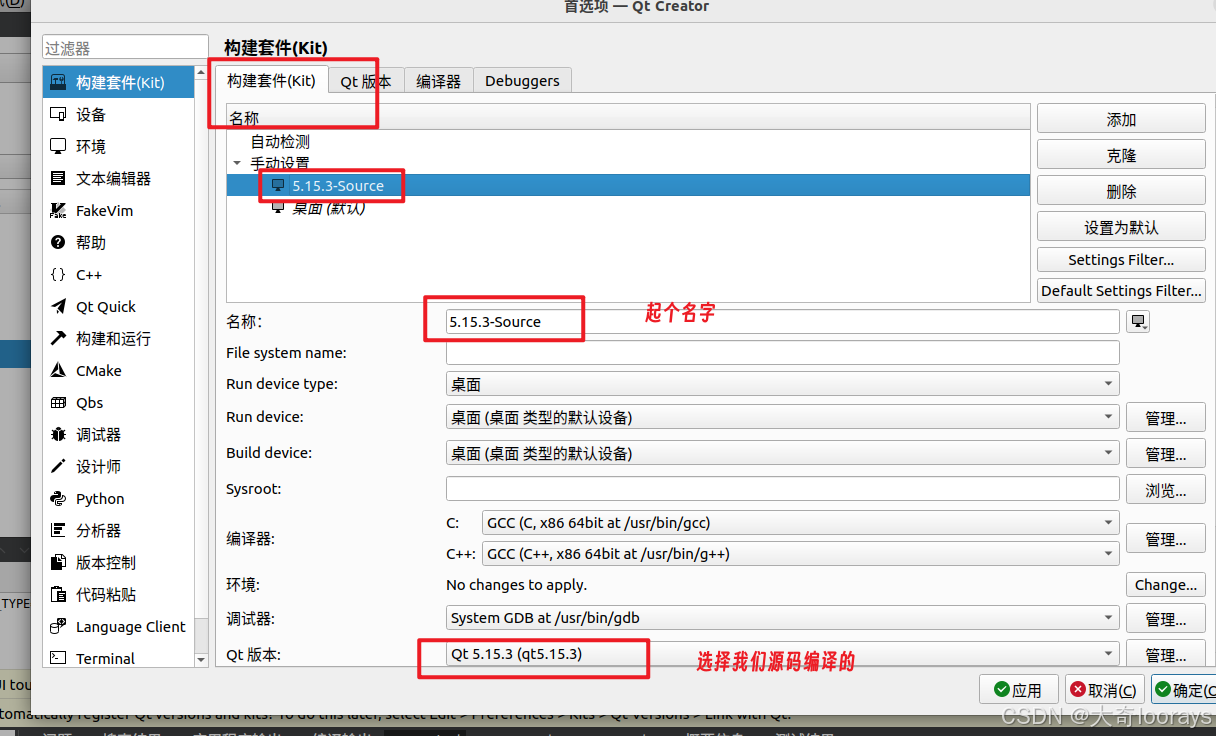
选择我们源码编译的那个目录里的qmake
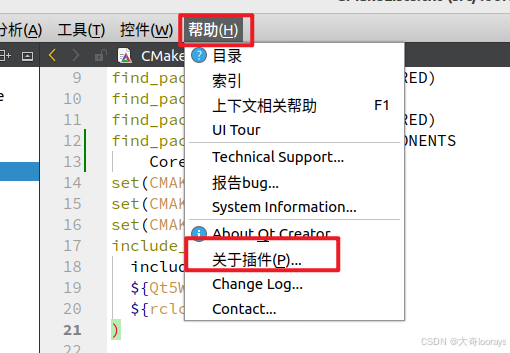
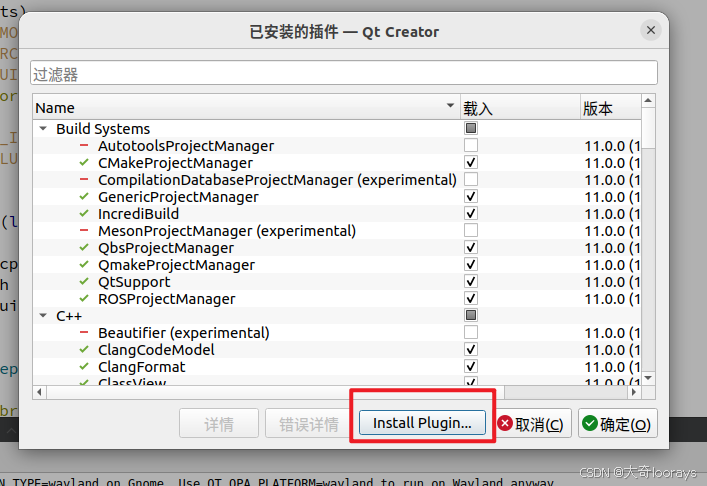
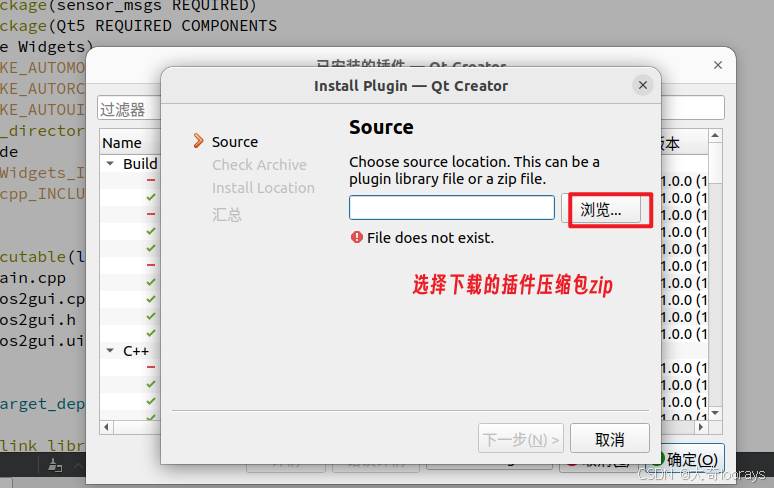
安装qt插件(ros)
将插件导入qt中
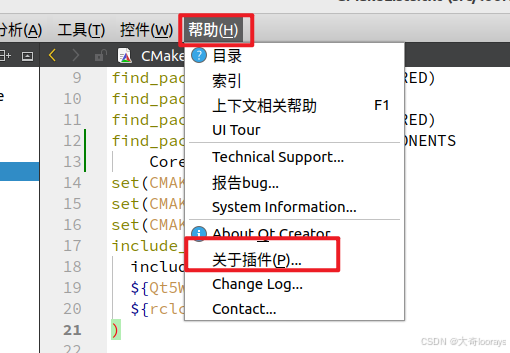
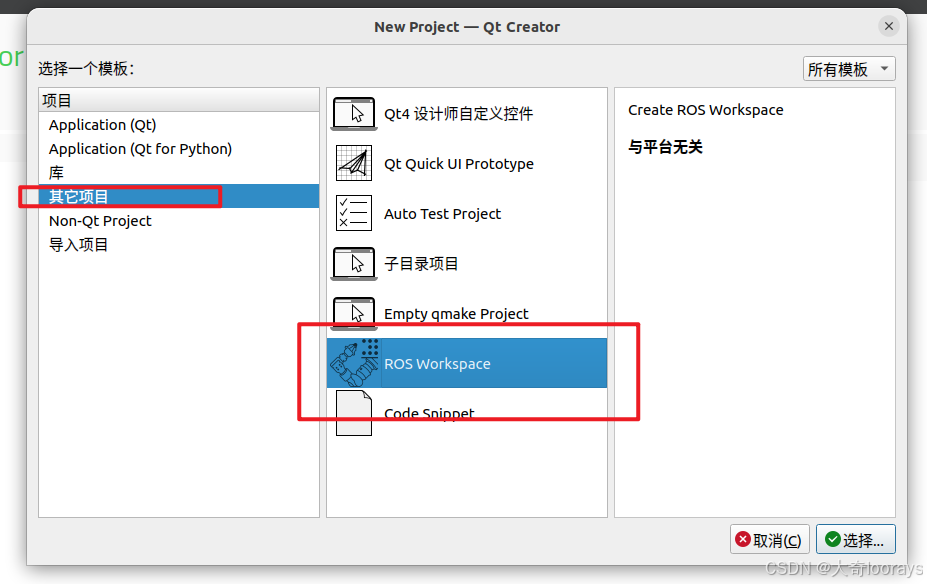
创建qt的ros项目
参考 :【机器人】ROS结合Qt开发上位机软件工作空间配置-CSDN博客
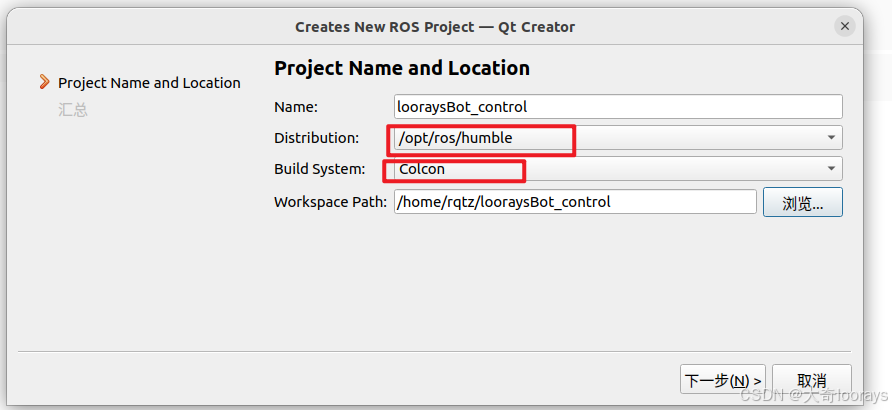
创建一个工作空间,需包含src目录,然后打开qt creator ,选择创建新项目,选择其他项目,ros
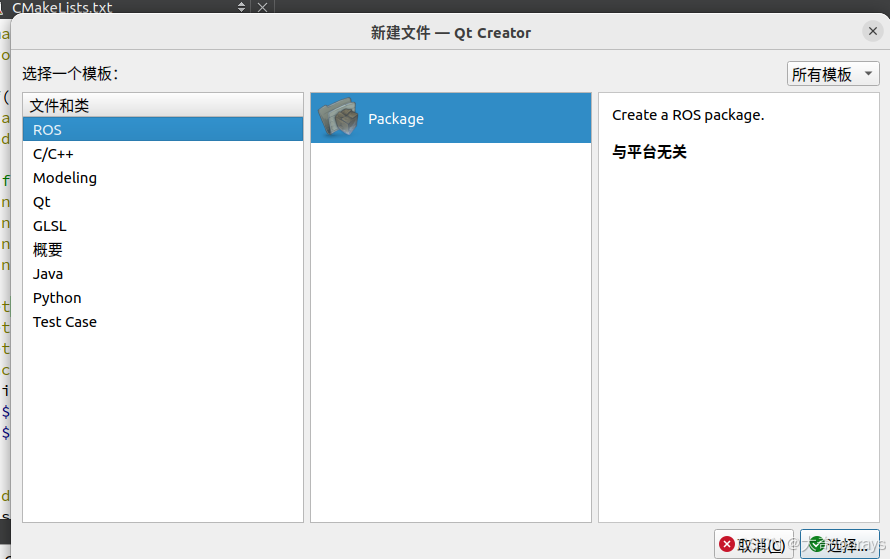
- 右键src添加qt设计师界面类,选择widgets
- 然后随便搞一个名字,这里叫ros2_Gui
- 在右键src添加c++source文件,名字为main函数
- 然后再配置cmakelist
cpp
cmake_minimum_required(VERSION 3.8)
project(looraysBot_rviz)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(Qt5 REQUIRED COMPONENTS
Core Widgets)
set(CMAKE_AUTOMOC ON)
set(CMAKE_AUTORCC ON)
set(CMAKE_AUTOUIC ON)
include_directories(
include
${Qt5Widgets_INCLUDE_DIRS}
${rclcpp_INCLUDE_DIRS}
)
add_executable(looraysBot_Gui
src/main.cpp
src/ros2gui.cpp
src/ros2gui.h
src/ros2gui.ui
)
ament_target_dependencies(looraysBot_Gui rclcpp)
target_link_libraries(looraysBot_Gui Qt5::Widgets)
install(TARGETS looraysBot_Gui
DESTINATION lib/${PROJECT_NAME})
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()main函数
cpp
#include <QApplication>
#include <QMainWindow>
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/laser_scan.hpp>
#include "ros2gui.h"
int main(int argc, char *argv[])
{
rclcpp::init(argc, argv);
QApplication a(argc, argv);
ros2Gui w;
w.show();
int res = a.exec();
rclcpp::shutdown();
return res;
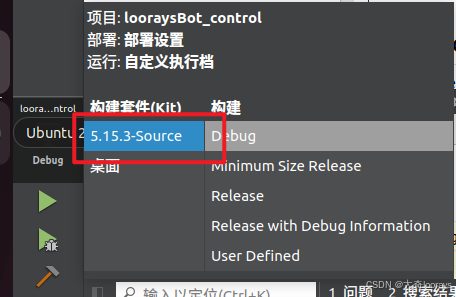
}编译程序
左下角选择编译套件,为源码编译的套件,然后直接点锤子,编译
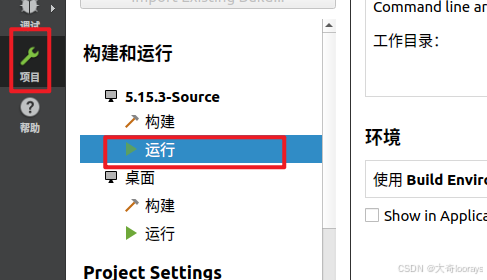
选择你ros包生成的那个节点可执行文件,就是cmakelist里面的add_exautle,在 install目录
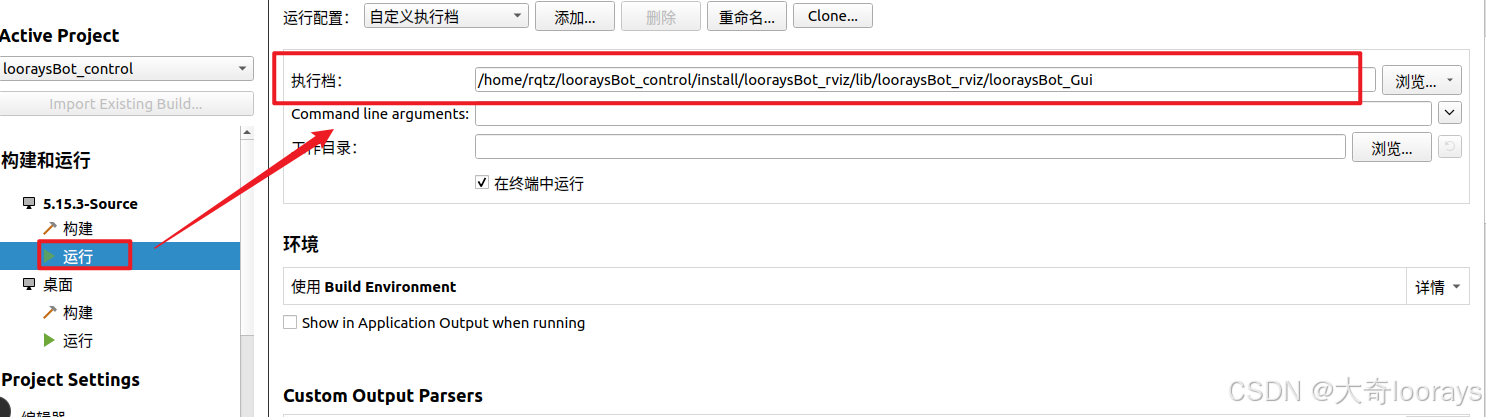
再点击运行即可
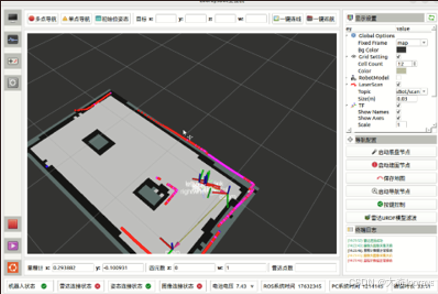
效果(实际开发好的上位机)