开篇介绍:
hello 大家,本篇博客,我们继续来学习Linux中的进程信号,话不多说,我们开始。
从 "按 Ctrl+C 终止程序" 到 "子进程退出自动回收",信号贯穿了 Linux 系统编程的核心场景。但信号的本质的是什么?用户态与内核态如何切换处理信号?为什么有些函数不能在信号处理中调用?
一、信号捕捉:用户态与内核态的 "跨区协作"
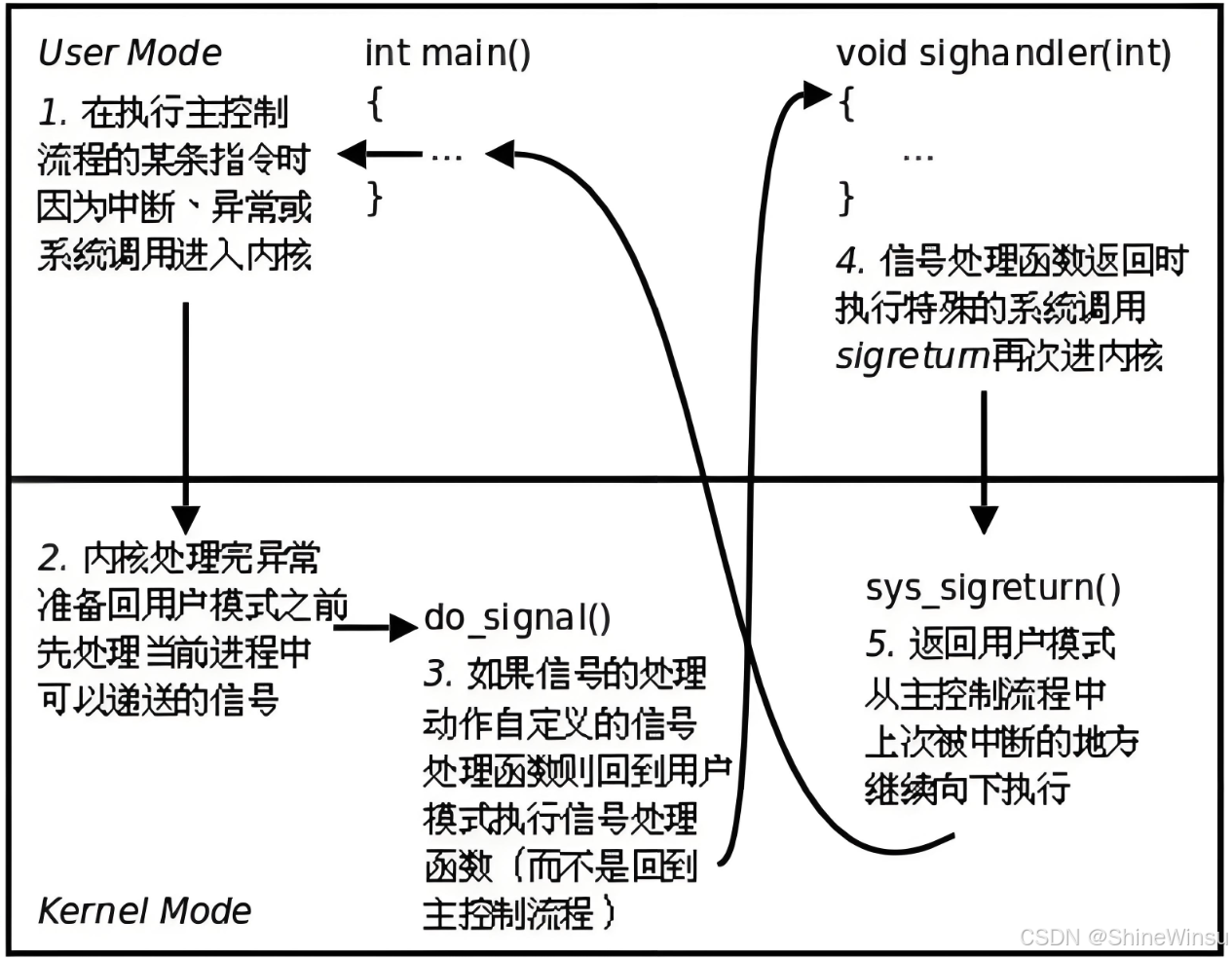
信号捕捉是进程自定义信号处理函数,当信号递达时暂停主流程、执行自定义逻辑 的过程。这个过程涉及用户态和内核态的多次切换,我们先从 "处理突然上门的维修师傅" 这个生活场景入手,理解整体流程:
1.1 生活类比:主流程与信号处理的切换
- 用户态(主流程):你正在家里写代码(执行
main函数),这是 "用户态"------ 只能操作自己的 "地盘"(用户内存空间 0-3GB),不能碰系统核心资源。 - 信号产生(维修上门):突然接到电话,维修师傅已经到门口(信号递达),你需要暂停写代码,去开门处理。
- 进入内核态(身份验证):你不能直接开门就让师傅进来(安全风险),需要先 "进入内核态"------ 相当于去小区门卫室登记(内核检查信号合法性、阻塞状态),内核会保存你当前的工作状态(比如写到哪一行代码、寄存器里的数据),这叫 "上下文保存"。
- 执行处理函数(用户态):内核确认可以处理后,让你回到家里(用户态),执行 "接待维修师傅" 的逻辑(自定义信号处理函数
handler)------ 比如给师傅开门、说明问题。 - 返回内核态(流程登记):维修完成后,你需要再次去门卫室(内核态)登记 "处理完毕",通过
sigreturn系统调用告诉内核:"信号处理完了,我要回去写代码了"。 - 回到主流程(用户态):内核检查没有新的信号需要处理,就恢复你之前的工作状态(上下文恢复),你继续从刚才暂停的地方写代码。
1.2 信号捕捉的底层流程(逐行拆解)
1.2.1 第一步:注册信号处理函数
进程通过signal或sigaction向内核 "登记" 信号处理逻辑 ------ 相当于提前告诉小区门卫:"如果维修师傅(某信号)来了,就按我给的流程(handler)处理"。
#include <iostream>
#include <signal.h>
#include <unistd.h>
using namespace std;
// 自定义信号处理函数(用户态)
void sigquit_handler(int sig) {
cout << "\n=== 信号处理函数执行 ===" << endl;
cout << "收到信号编号:" << sig << "(SIGQUIT)" << endl;
cout << "处理逻辑:记录信号日志,不终止进程" << endl;
cout << "=======================\n" << endl;
}
int main() {
// 注册SIGQUIT(3号信号,对应Ctrl+\)的处理函数
// 第一个参数:要处理的信号;第二个参数:处理函数指针
signal(SIGQUIT, sigquit_handler);
cout << "进程PID:" << getpid() << endl;
cout << "提示:按Ctrl+\\触发SIGQUIT,按Ctrl+C触发SIGINT(默认终止)" << endl;
// 主流程:无限循环,模拟业务逻辑
int count = 0;
while (true) {
sleep(1);
cout << "主流程运行中,count:" << ++count << endl;
}
return 0;
}编译运行:
g++ sig_catch.cc -o sig_catch
./sig_catch效果:按 Ctrl+\ 会触发自定义处理函数(输出日志),进程不终止;按 Ctrl+C 会执行默认动作(终止进程)。
1.2.2 第二步:用户态→内核态的切换细节
当主流程执行到sleep(1)(系统调用)时,会主动陷入内核态 ------ 这是内核检查信号的 "关键节点"。内核会做两件事:
- 保存上下文 :把用户态的寄存器(如
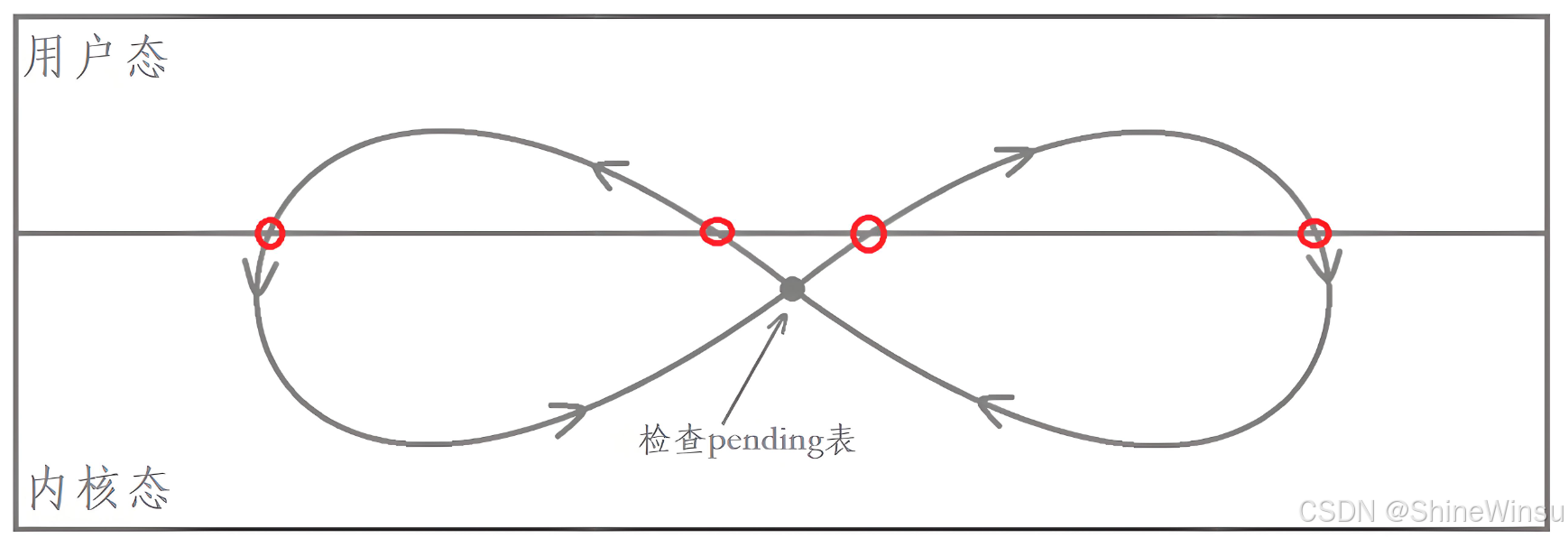
eax、ebx)、程序计数器(PC,记录下一条要执行的指令地址)、栈指针等数据保存起来,相当于 "给当前工作状态拍张照"。 - 检查信号状态 :对比 "未决信号集" 和 "阻塞信号集",判断是否有可递达的信号:
- 未决信号集(Pending):已经产生但未处理的信号(比如刚按了 Ctrl+\,SIGQUIT 处于未决状态);
- 阻塞信号集(Block):进程主动屏蔽的信号(比如没屏蔽 SIGQUIT,所以可递达)。
1.2.3 第三步:执行自定义处理函数(用户态)
如果信号可递达且有自定义处理函数,内核会:
- 从内核态切换到用户态;
- 把程序计数器(PC)指向自定义处理函数(
sigquit_handler); - 执行处理函数 ------ 此时使用的是独立的栈空间,和主流程的栈互不干扰(相当于维修师傅用自己的工具包,不碰你的工作区)。
1.2.4 第四步:处理函数返回→内核态(sigreturn)
处理函数执行完毕后,不会直接回到主流程,而是通过特殊系统调用sigreturn 再次陷入内核态 ------ 这一步的作用是 "恢复上下文":
- 内核从之前保存的 "上下文快照" 中,恢复主流程的寄存器、程序计数器等数据;
- 检查是否有新的未决信号(比如处理 SIGQUIT 时又按了一次 Ctrl+\);
- 若没有新信号,从内核态切换回用户态,主流程从被中断的地方(
sleep(1)之后)继续执行。
1.3 更可靠的信号注册:sigaction 函数(详细拆解)
signal函数虽然简单,但存在兼容性问题(不同系统行为不同),且功能有限。sigaction是 POSIX 标准函数,支持更精细的信号控制 ,其核心是struct sigaction结构体,我们逐个字段拆解:
1.3.1 struct sigaction 结构体详解
#include <signal.h>
struct sigaction {
void (*sa_handler)(int); // 信号处理函数(核心字段)
sigset_t sa_mask; // 处理信号时,临时阻塞的信号集
int sa_flags; // 处理标志(控制信号处理的细节)
void (*sa_sigaction)(int, siginfo_t *, void *); // 带参数的处理函数(扩展)
};字段 1:sa_handler------ 信号处理方式
SIG_DFL:执行系统默认动作(比如 SIGINT 默认终止进程);SIG_IGN:忽略信号(收到后不做任何操作);- 自定义函数指针:比如
void handler(int sig),信号递达时执行该函数。
字段 2:sa_mask------ 临时阻塞的信号集(关键!)
处理信号时,内核会自动将当前信号加入阻塞集(避免同一信号递归触发),而sa_mask可以指定 "额外需要阻塞的信号"。
示例:处理 SIGINT 时,临时阻塞 SIGQUIT 和 SIGALRM,避免处理过程被打断:
struct sigaction act;
act.sa_handler = sigint_handler;
sigemptyset(&act.sa_mask); // 初始化阻塞集为空
sigaddset(&act.sa_mask, SIGQUIT); // 额外阻塞SIGQUIT
sigaddset(&act.sa_mask, SIGALRM); // 额外阻塞SIGALRM场景 :如果处理 SIGINT 时(比如保存数据),不希望被 SIGQUIT(终止)或 SIGALRM(定时器)打断,就可以用sa_mask阻塞这些信号。
这个其实就和我们之前使用的创建信号集,然后将信号集传给sigprocmask函数一样的道理。
然后在这里我在补充一点,就是os在同时大量接收同一个信号时,会先将该信号设为堵塞状态,等处理了这一个信号之后,然后再接收这个信号,其实就是为了防止比如我们同时疯狂按ctrl+c,那么os要是嘎嘎接收处理的话,那么可能上一个的ctrl+c还没处理完,中间就插入一个新的ctrl+c,这一点希望大家注意哦。
字段 3:sa_flags------ 处理标志(常用值详解)
| 标志 | 作用(通俗解释) |
|---|---|
| SA_RESTART | 被信号打断的系统调用(如 read、sleep、write)自动重启,避免返回 - 1(错误) |
| SA_NOCLDSTOP | 子进程暂停时不发送 SIGCHLD 信号(只在子进程退出时发送) |
| SA_NODEFER | 处理信号时不自动阻塞当前信号(默认会阻塞,避免递归) |
| SA_SIGINFO | 使用sa_sigaction作为处理函数(可获取信号详细信息,如发送者 PID、信号原因) |
SA_RESTART 的实用场景 :如果没有 SA_RESTART,read函数(从键盘读取输入)被信号打断后会返回 - 1,需要手动处理;有了 SA_RESTART,read会自动重启,继续等待输入。
void sigint_handler(int sig) {
cout << "收到SIGINT,处理中..." << endl;
sleep(2);
}
int main() {
struct sigaction act;
act.sa_handler = sigint_handler;
sigemptyset(&act.sa_mask);
act.sa_flags = SA_RESTART; // 开启系统调用自动重启
sigaction(SIGINT, &act, NULL);
char buf[1024];
cout << "请输入内容:" << endl;
ssize_t ret = read(STDIN_FILENO, buf, sizeof(buf)); // 被信号打断后会自动重启
if (ret > 0) {
cout << "你输入的是:" << buf << endl;
}
return 0;
}字段 4:sa_sigaction------ 带参数的处理函数
当sa_flags = SA_SIGINFO时,会使用sa_sigaction作为处理函数,它能获取更详细的信号信息(比如谁发送的信号、信号产生的原因):
void siginfo_handler(int sig, siginfo_t *info, void *ucontext) {
cout << "收到信号:" << sig << endl;
cout << "信号发送者PID:" << info->si_pid << endl; // 发送信号的进程PID
cout << "信号产生原因:" << info->si_code << endl; // 比如SI_USER(用户发送)
}
int main() {
struct sigaction act;
act.sa_sigaction = siginfo_handler;
sigemptyset(&act.sa_mask);
act.sa_flags = SA_SIGINFO; // 启用带参数的处理函数
sigaction(SIGINT, &act, NULL);
while (true) sleep(1);
return 0;
}1.3.2 sigaction 函数调用示例(完整代码)
#include <iostream>
#include <signal.h>
#include <unistd.h>
#include <cstring>
using namespace std;
void sigint_handler(int sig) {
cout << "\n=== 处理SIGINT(2号信号) ===" << endl;
cout << "处理中...(5秒后完成)" << endl;
sleep(5); // 模拟耗时处理
cout << "SIGINT处理完毕!\n" << endl;
}
int main() {
struct sigaction act, old_act;
memset(&act, 0, sizeof(act)); // 初始化结构体
// 1. 设置处理函数
act.sa_handler = sigint_handler;
// 2. 设置临时阻塞集:处理SIGINT时,阻塞SIGQUIT和SIGALRM
sigemptyset(&act.sa_mask);
sigaddset(&act.sa_mask, SIGQUIT); // 3号信号
sigaddset(&act.sa_mask, SIGALRM); // 14号信号
// 3. 设置处理标志:系统调用自动重启
act.sa_flags = SA_RESTART;
// 4. 注册信号处理动作(替换SIGINT的默认处理)
int ret = sigaction(SIGINT, &act, &old_act);
if (ret == -1) {
perror("sigaction failed");
return 1;
}
cout << "进程PID:" << getpid() << endl;
cout << "提示:" << endl;
cout << "1. 按Ctrl+C触发SIGINT(处理中会阻塞SIGQUIT和SIGALRM)" << endl;
cout << "2. 按Ctrl+\\触发SIGQUIT(处理SIGINT时按,会等待处理完毕后生效)" << endl;
// 主流程:无限循环
while (true) {
cout << "主流程运行中..." << endl;
sleep(1);
}
// (可选)恢复原来的信号处理动作
// sigaction(SIGINT, &old_act, NULL);
return 0;
}运行效果:
- 按 Ctrl+C 触发 SIGINT,处理函数执行 5 秒;
- 处理期间按 Ctrl+\(SIGQUIT),由于
sa_mask阻塞了 SIGQUIT,该信号会处于未决状态; - 5 秒后 SIGINT 处理完毕,SIGQUIT 才会递达(默认动作:终止进程 + 生成 core 文件)。
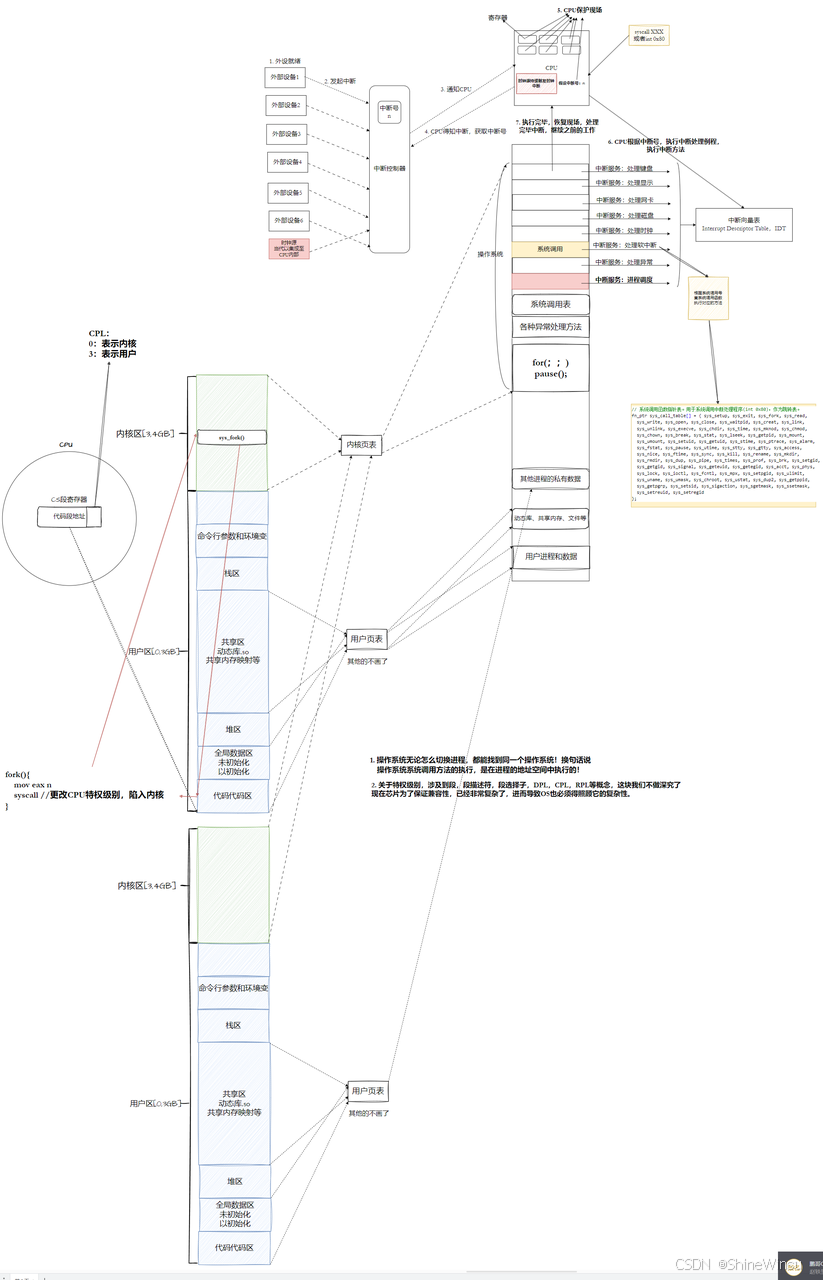
二、系统底层机制:中断驱动的 "操作系统运行逻辑"
信号处理的本质是 "软中断",而操作系统的整个运行都依赖 "中断"------ 没有中断,操作系统就是一个 "躺平的死循环"。这部分我们用 "小区管理系统" 类比,拆解硬件中断、时钟中断、软中断的核心逻辑。
2.1 核心前提:内核态与用户态的 "权限隔离"
在讲中断前,必须先搞懂 "内核态" 和 "用户态"------ 这是操作系统安全运行的基础,我们用 "小区的业主和物业" 类比:
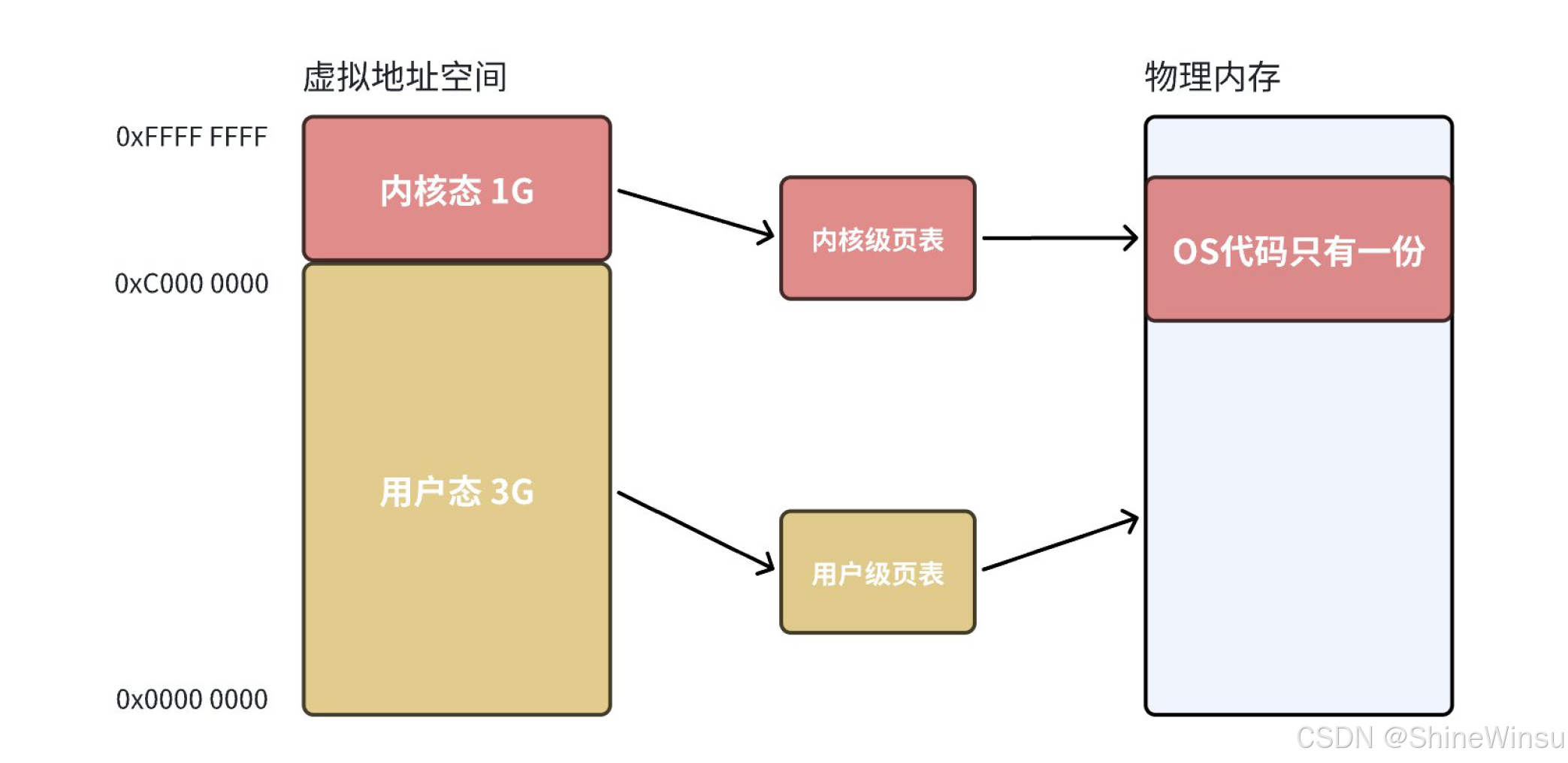
- 用户态(业主):你住在小区里(进程的 0-3GB 内存空间),只能操作自己家的东西(用户数据、代码),不能碰小区的核心设施(比如配电房、水泵房);
- 内核态(物业):物业拥有小区的 "最高权限",可以操作所有公共资源(3-4GB 内核内存空间),比如维修配电房、管理电梯;
- 权限切换:业主需要维修时(进程需要系统资源),必须通过物业(内核)申请,不能自己动手(用户态不能直接操作内核资源)。
关键细节:CPL 特权级
内核态和用户态的区分由 CPU 的 "当前特权级别(CPL)" 控制:
- CPL=0:内核态(最高权限);
- CPL=3:用户态(最低权限);
- 切换方式:通过软中断(如
int 0x80、syscall)或硬件中断,CPU 会自动将 CPL 从 3 切换到 0(进入内核态),处理完后再切回 3(用户态)。
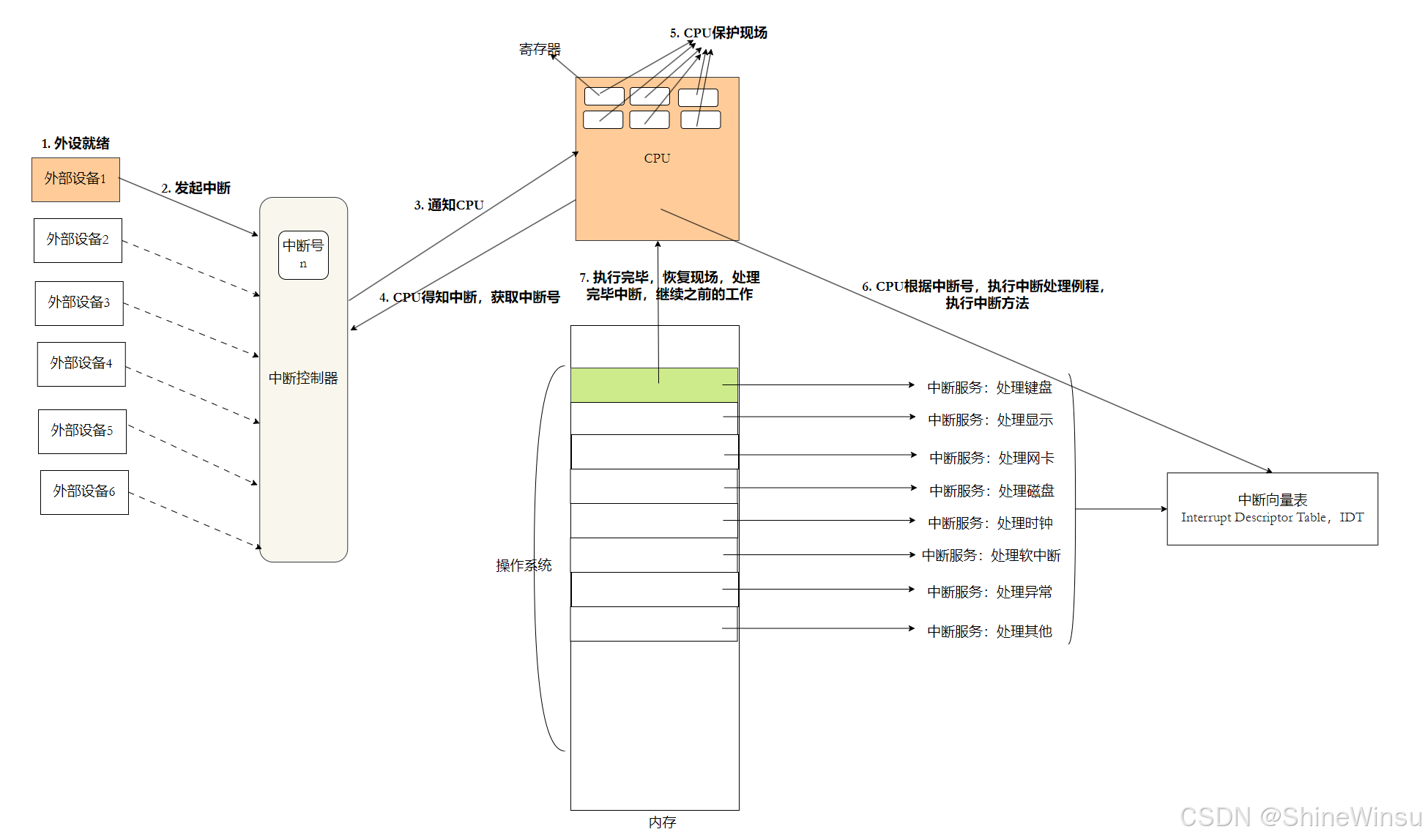
2.2 硬件中断:"外部设备的呼叫"
硬件中断是外部设备(键盘、鼠标、硬盘)主动向 CPU 发送的中断请求,比如你按键盘、硬盘读写完成,都会触发硬件中断。
2.2.1 生活类比:小区的 "紧急呼叫按钮"
每个硬件设备都相当于小区里的一个 "紧急呼叫按钮":
- 键盘:你按 Ctrl+C(相当于按了 "紧急呼叫"),键盘会向 CPU 发送中断请求;
- 中断控制器(8259A 芯片):相当于小区的 "呼叫中心",接收所有硬件的呼叫,再转发给 CPU;
- 中断向量表:相当于 "呼叫中心的登记表",每个中断请求对应一个 "处理方式"(比如键盘中断对应 "处理按键输入")。
2.2.2 硬件中断的处理流程(结合 Linux 0.11 源码)
Linux 内核启动时,会通过 trap_init()函数初始化 "中断向量表",给每个硬件中断绑定处理函数:
// Linux 0.11 内核源码:trap_init()
void trap_init(void) {
// 给"除0错误"绑定处理函数divide_error
set_trap_gate(0, ÷_error);
// 给"调试中断"绑定处理函数debug
set_trap_gate(1, &debug);
// 给"键盘中断"绑定处理函数keyboard_interrupt
set_intr_gate(0x21, &keyboard_interrupt);
// ... 其他硬件中断的绑定
}处理流程:
- 硬件设备(如键盘)触发中断,发送中断请求到中断控制器;
- 中断控制器将中断请求转发给 CPU;
- CPU 暂停当前正在执行的任务(用户态或内核态),根据 "中断号"(比如键盘中断号是 0x21)在中断向量表中找到对应的处理函数;
- 执行处理函数(比如键盘中断处理函数会读取按键值,转化为 SIGINT 信号);
- 处理完毕后,CPU 恢复之前的任务,继续执行。
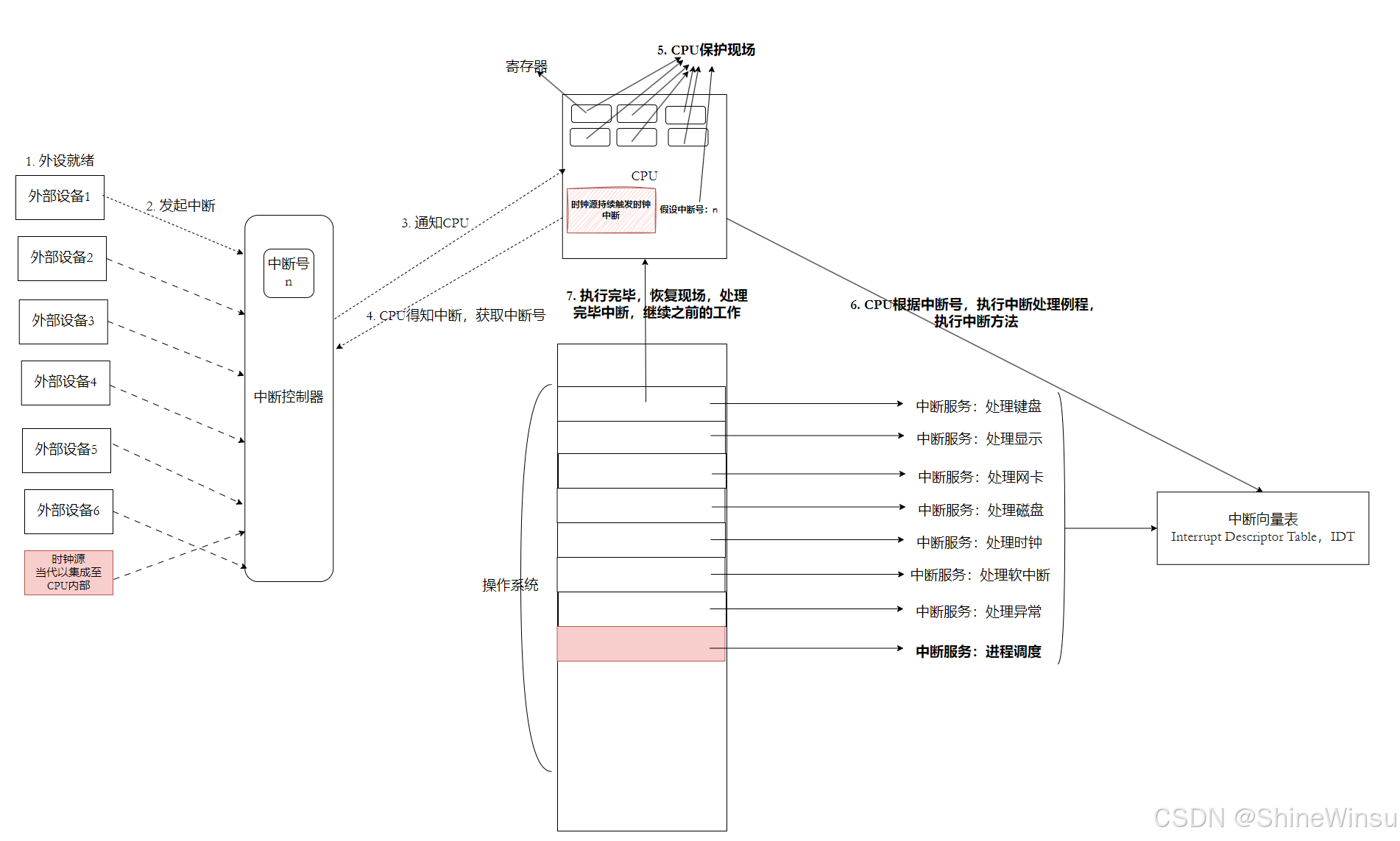
2.3 时钟中断:"推动系统运行的心跳"
操作系统需要定期切换进程(时间片调度)、更新系统时间,这些都依赖 "时钟中断"------ 由定时器硬件(如 8253 芯片)定期触发的中断。
2.3.1 生活类比:学校的 "下课铃"
时钟中断就像学校的下课铃:
- 定时器硬件每隔 10ms(可配置)触发一次时钟中断(相当于下课铃每 40 分钟响一次);
- 每次时钟中断,内核会做两件核心事:
- 更新系统时间(比如秒数 + 1);
- 检查当前进程的时间片是否用完,如果用完,调用
schedule()函数切换到下一个进程。
2.3.2 时钟中断的底层逻辑(结合源码)
// Linux 0.11 内核源码:sched_init()
void sched_init(void) {
// 给时钟中断绑定处理函数timer_interrupt
set_intr_gate(0x20, &timer_interrupt);
// 允许时钟中断(开启"下课铃")
outb(inb_p(0x21) & ~0x01, 0x21);
}
// 时钟中断处理函数
void timer_interrupt(void) {
// 调用do_timer函数,处理进程调度和时间更新
call _do_timer;
}
// 调度核心函数
void do_timer(long cpl) {
// 更新进程时间片,检查是否需要切换
// ...
schedule(); // 进程切换
}关键结论:没有时钟中断,操作系统就无法自动切换进程 ------ 所有进程会一直执行到结束,无法实现 "多任务并发"。
2.4 软中断:"用户主动发起的请求"
软中断是由软件主动触发的中断 ,最典型的是 "系统调用"(如read、write、fork)------ 进程需要内核资源时,主动向内核发起请求。
2.4.1 生活类比:去政务大厅办业务
你(用户态进程)要办身份证(需要内核资源),不能直接进公安局的办公区(内核态),必须通过 "政务大厅"(软中断):
- 你准备好材料(系统调用参数,如
read的文件描述符、缓冲区地址); - 到政务大厅取号(执行
int 0x80或syscall指令,触发软中断); - 工作人员(内核)接收你的请求,帮你办理业务(执行系统调用处理函数);
- 办理完毕,工作人员把身份证(返回值)交给你,你回到家里(用户态)。
2.4.2 系统调用的底层流程(结合源码)
-
系统调用号:每个系统调用都有一个唯一的编号(比如
read是 3,write是 4),进程通过eax寄存器将编号传给内核; -
系统调用表:内核中有一个
sys_call_table数组,存储所有系统调用的处理函数,索引就是系统调用号:// Linux 0.11 系统调用表 fn_ptr sys_call_table[] = { sys_setup, // 0:系统初始化 sys_exit, // 1:进程退出 sys_fork, // 2:创建进程 sys_read, // 3:读文件 sys_write, // 4:写文件 // ... 其他系统调用 }; -
执行流程 :
// 系统调用触发指令(int 0x80) _system_call: // 检查系统调用号是否合法 cmp eax, nr_system_calls-1 ja bad_sys_call // 保存寄存器状态 push ds push es push fs // 调用系统调用处理函数(sys_call_table[eax]) call [_sys_call_table+eax*4] // 保存返回值,恢复上下文 push eax // ...
所以我们也就能知道,其实平时我们调用系统函数接口,都是被glibc封装好的,在内核中实际上是调用系统调用号
一、glibc 的 "封装本质":给系统调用套上 "易用外衣"
我们平时写write(fd, buf, len)时,并不是直接调用内核的系统调用,而是调用glibc 库中封装好的同名函数------glibc 相当于 "翻译官",把 C 语言的函数调用,转换成内核能识别的 "系统调用号 + 软中断触发" 逻辑。
1.1 为什么需要 glibc 封装?(生活类比)
内核的系统调用是 "底层接口",就像餐厅后厨的 "原料操作"(直接切菜、炒菜);而 glibc 封装的函数是 "前台点餐系统"(用户点 "宫保鸡丁",前台转成后厨的 "鸡肉 + 花生 + 辣椒" 操作)。如果没有封装:
- 你需要手动处理寄存器传参(把
fd、buf、len放到指定寄存器); - 手动触发软中断(执行
syscall或int 0x80); - 手动处理内核返回值(比如错误码、返回长度)。
glibc 把这些 "繁琐细节" 全部封装,让开发者只用关注 "调用函数",不用关心底层实现。
1.2 glibc 封装的典型步骤(以write为例)
glibc 中的write函数封装逻辑大致如下(简化版):
// glibc中的write封装函数(用户态)
ssize_t write(int fd, const void *buf, size_t count) {
// 1. 准备参数:把fd、buf、count放到指定寄存器
// x86_64架构:rdi=fd, rsi=buf, rdx=count
// 2. 把系统调用号(write的调用号是1)放到rax寄存器
// 3. 触发软中断(syscall指令),陷入内核态
// 4. 内核处理后,返回值存在rax中,glibc把rax返回给用户
long ret;
asm volatile (
"syscall" // 触发软中断,进入内核态
: "=a"(ret) // 输出:rax的值存入ret
: "a"(__NR_write), // 输入:rax=__NR_write(系统调用号1)
"D"(fd), "S"(buf), "d"(count) // 输入:rdi=fd, rsi=buf, rdx=count
: "rcx", "r11", "memory" // 被破坏的寄存器(通知编译器)
);
// 处理错误:如果返回值<0,设置errno,返回-1
if (ret < 0) {
errno = -ret;
return -1;
}
return ret;
}核心动作:
- 把系统调用号(
__NR_write)和参数放到指定寄存器; - 用
syscall触发软中断,切换到内核态; - 处理内核返回值(错误码转
errno),返回给用户。
二、系统调用号的 "本质":内核的 "服务编号"
系统调用号是内核给每个系统调用分配的唯一整数标识,相当于 "餐厅后厨的服务编号"(比如 1 号是 "写文件",3 号是 "读文件")。
2.1 系统调用号的来源:内核定义的 "全局枚举"
内核在头文件中定义了所有系统调用的编号,比如 x86_64 架构的 Linux 内核,系统调用号定义在/usr/include/asm/unistd_64.h中(不同架构路径略有差异):
// 部分系统调用号定义(x86_64)
#define __NR_read 0 // read的系统调用号是0
#define __NR_write 1 // write的系统调用号是1
#define __NR_open 2 // open的系统调用号是2
#define __NR_close 3 // close的系统调用号是3
#define __NR_fork 57 // fork的系统调用号是57
#define __NR_exit 60 // exit的系统调用号是60glibc 会包含这些头文件,把__NR_write等宏映射到对应的整数,供封装函数使用。
2.2 系统调用号的作用:内核的 "查表索引"
内核中有一个系统调用表(sys_call_table),本质是 "函数指针数组"------ 数组下标就是系统调用号,数组元素是对应的内核处理函数。
比如 x86_64 内核的系统调用表(简化版):
// 内核中的系统调用表(内核态)
void *sys_call_table[] = {
sys_read, // 下标0:对应read的内核处理函数
sys_write, // 下标1:对应write的内核处理函数
sys_open, // 下标2:对应open的内核处理函数
sys_close, // 下标3:对应close的内核处理函数
// ... 其他系统调用的处理函数
};当用户态触发syscall时:
- 内核从
rax寄存器读取系统调用号(比如 1); - 以调用号为下标,从
sys_call_table中取出对应的函数指针(sys_write); - 执行该内核函数,处理具体逻辑(比如向文件写入数据);
- 将返回值存入
rax寄存器,切换回用户态。
三、用户态到内核态的 "完整调用链路"(以write为例)
我们用write(1, "hello\n", 6)(向标准输出写字符串)为例,拆解用户代码→glibc 封装→内核系统调用的完整流程:
步骤 1:用户代码调用write
#include <unistd.h>
int main() {
write(1, "hello\n", 6); // 调用glibc的write函数
return 0;
}步骤 2:glibc 封装函数处理
- 把参数
fd=1、buf="hello\n"、count=6分别放入寄存器rdi、rsi、rdx; - 把系统调用号
__NR_write=1放入寄存器rax; - 执行
syscall指令,触发软中断,CPU 自动切换到内核态(CPL 从 3→0)。
步骤 3:内核处理系统调用
- 内核保存用户态上下文(寄存器、程序计数器等);
- 从
rax读取系统调用号 1,查sys_call_table[1]得到sys_write函数; - 执行
sys_write内核函数:- 检查
fd=1是否合法(标准输出的文件描述符); - 从用户态的
buf中读取数据(hello\n); - 调用驱动层接口,把数据写入终端设备;
- 返回写入的字节数(6)到
rax寄存器。
- 检查
步骤 4:返回用户态
- 内核恢复用户态上下文;
- CPU 切换回用户态(CPL 从 0→3);
- glibc 的
write封装函数读取rax的值(6),返回给用户代码。
2.5 操作系统的本质:"躺平在中断上的死循环"
通过以上分析,我们可以得出操作系统的核心运行逻辑:
// 操作系统主函数(简化版)
void main(void) {
// 1. 初始化中断向量表(绑定硬件中断、时钟中断、系统调用的处理函数)
trap_init();
sched_init();
// ... 其他初始化
// 2. 死循环:没有中断就"躺平"
for (;;) {
pause(); // 暂停,等待中断触发
}
}通俗理解:操作系统平时啥也不干,就卡在pause()里 "睡觉"。一旦有中断(硬件中断、时钟中断、软中断),就跳起来处理,处理完继续睡觉。所有进程调度、资源管理、信号处理,都是在 "中断处理" 中完成的 ------操作系统是 "躺平在中断上的代码块"。
三、可重入函数:"避免多个执行流'打架'"
**信号处理函数和主流程是两个独立的 "执行流",可能同时调用同一个函数 ------ 如果这个函数处理不好,就会导致数据错乱。**这部分我们用 "共用工具的两个人" 类比,讲透可重入函数的核心。
3.1 什么是可重入函数?(生活类比)
- 可重入函数:相当于两个人共用一把 "多功能工具",但工具的每个部件都是独立的(比如每人有自己的螺丝刀头),不会互相干扰;
- 不可重入函数:相当于两个人共用一把 "只有一个螺丝刀头" 的工具,第一个人用了还没还,第二个人就抢过去用,导致工具损坏(数据错乱)。
官方定义:
- 可重入函数:可以被多个执行流同时调用,且不会因为并发调用导致数据不一致的函数;
- 不可重入函数:并发调用时会导致数据错乱的函数。
3.2 不可重入函数的 "灾难现场"(代码实例)
我们用 "全局链表插入" 这个经典场景,演示不可重入函数的问题:
3.2.1 代码示例:全局链表的插入(不可重入)
cpp
#include <iostream>
#include <signal.h>
#include <unistd.h>
using namespace std;
// 全局链表节点
typedef struct Node {
int data;
struct Node* next;
} Node;
Node* head = NULL; // 全局链表头(多个执行流共用)
// 插入节点的函数(不可重入)
void insert_node(Node* new_node) {
// 步骤1:新节点的next指向当前链表头
new_node->next = head;
// 步骤2:链表头指向新节点(完成插入)
head = new_node;
cout << "插入节点:" << new_node->data << ",当前链表头:" << head->data << endl;
}
// 信号处理函数(执行流1)
void sig_handler(int sig) {
Node node2 = {2, NULL};
insert_node(&node2); // 调用不可重入函数
}
// 主流程(执行流2)
int main() {
// 注册信号处理函数
signal(SIGINT, sig_handler);
Node node1 = {1, NULL};
cout << "主流程开始插入节点1..." << endl;
// 执行insert_node,执行到步骤1后被信号打断
insert_node(&node1);
cout << "主流程插入完成,最终链表头:" << head->data << endl;
return 0;
}3.2.2 灾难执行流程(图文拆解)
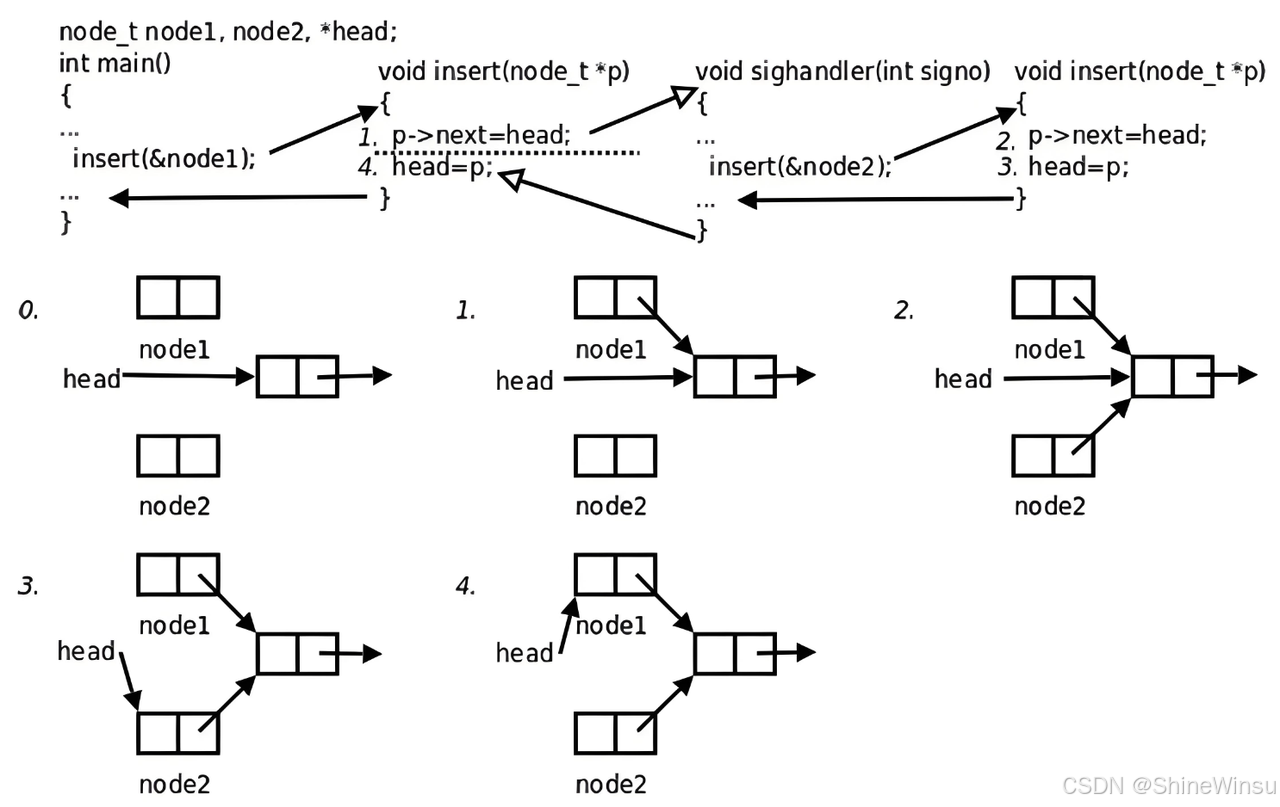
- 主流程执行步骤 1 :
node1->next = head(此时head是 NULL,node1->next = NULL); - 信号触发 :按 Ctrl+C,主流程被打断,切换到
sig_handler; - 信号处理函数执行 :
insert_node(&node2),完整执行步骤 1 和步骤 2:- 步骤 1:
node2->next = head(head是 NULL,node2->next = NULL); - 步骤 2:
head = &node2(head现在指向node2);
- 步骤 1:
- 返回主流程 :继续执行步骤 2:
head = &node1(head被改为指向node1); - 最终结果 :
node1->next = NULL,node2被 "丢弃",链表只有node1,数据错乱!
3.3 为什么会不可重入?(核心原因)
不可重入函数的本质是 "访问了共享资源",常见场景:
| 不可重入原因 | 示例(代码片段) | 生活类比 |
|---|---|---|
| 操作全局变量 / 静态变量 | Node* head = NULL;(全局链表头) |
两个人共用一个笔记本,互相覆盖内容 |
| 调用 malloc/free | void func() { int* p = malloc(4); } |
两个人共用一个工具箱,工具被抢用 |
| 调用标准 I/O 函数(如 printf) | void func() { printf("hello"); } |
printf 操作全局缓冲区,并发时错乱 |
| 持有锁但未释放 | void func() { pthread_lock(&mutex); } |
两个人抢一把锁,导致死锁或数据错 |
3.4 可重入函数的 "安全守则"(实例改造)
要让函数可重入,必须满足 "不访问共享资源,只使用局部变量和函数参数"。我们改造上面的链表插入函数:
3.4.1 改造后的可重入函数
// 可重入版本:通过参数传入链表头指针的地址,不使用全局变量
void insert_node_reentrant(Node* new_node, Node** head_ptr) {
// 局部变量,每个执行流独立
Node* temp = *head_ptr;
new_node->next = temp;
*head_ptr = new_node;
cout << "插入节点:" << new_node->data << ",当前链表头:" << (*head_ptr)->data << endl;
}
// 信号处理函数(执行流1)
void sig_handler(int sig) {
Node node2 = {2, NULL};
Node* head2 = NULL; // 局部链表头,与主流程无关
insert_node_reentrant(&node2, &head2);
}
// 主流程(执行流2)
int main() {
signal(SIGINT, sig_handler);
Node node1 = {1, NULL};
Node* head1 = NULL; // 主流程的局部链表头
cout << "主流程开始插入节点1..." << endl;
insert_node_reentrant(&node1, &head1);
cout << "主流程插入完成,最终链表头:" << head1->data << endl;
return 0;
}改造核心 :每个执行流使用自己的局部链表头(head1和head2),不共享资源,因此不会互相干扰。
3.4.2 可重入函数的判断标准
| 判断维度 | 可重入函数 | 不可重入函数 |
|---|---|---|
| 全局变量 / 静态变量 | 不使用 | 使用 |
| 函数参数 | 只使用参数和局部变量 | 依赖全局变量 |
| 系统调用 | 只调用可重入系统调用(如 read) | 调用不可重入系统调用(如 malloc) |
| 标准库函数 | 不调用不可重入库函数 | 调用 printf、fopen 等不可重入库函数 |
| 锁操作 | 不持有锁,或持有后立即释放 | 长期持有锁,可能被并发调用打断 |
3.5 信号处理函数的 "避坑指南"
信号处理函数是典型的 "并发执行流",必须遵循以下规则:
- 尽量使用可重入函数(如
memcpy、strlen、read、write); - 避免操作全局变量 / 静态变量,若必须操作,需加锁(但要注意死锁风险);
- 避免调用
malloc、free、printf等不可重入函数; - 处理逻辑尽量简单,避免耗时操作(如
sleep(10))。
四、volatile 关键字:"打破编译器的'小聪明'"
volatile是 C/C++ 中的关键字,很多人误以为它是 "原子操作" 或 "线程安全",但在信号处理场景中,它的核心作用是保证变量的内存可见性------ 告诉编译器:"这个变量可能被意外修改(比如信号处理函数),每次用它都要从内存里读,别优化到寄存器里!"
4.1 编译器的 "优化陷阱"(代码实例)
我们用一个简单的flag变量,演示没有volatile时的问题:
4.1.1 无 volatile 的代码(编译器优化后出错)
#include <iostream>
#include <signal.h>
#include <unistd.h>
using namespace std;
int flag = 0; // 没有volatile关键字
// 信号处理函数:修改flag为1
void sig_handler(int sig) {
cout << "收到信号" << sig << ",flag从0改为1" << endl;
flag = 1;
}
int main() {
signal(SIGINT, sig_handler);
cout << "进程PID:" << getpid() << endl;
cout << "提示:按Ctrl+C触发信号" << endl;
// 循环检查flag,为1则退出
while (!flag) {
// 空循环,编译器会优化
}
cout << "flag为1,程序正常退出" << endl;
return 0;
}4.1.2 编译运行与问题分析
-
正常编译(无优化):
g++ volatile_test.cc -o volatile_test ./volatile_test按 Ctrl+C,
flag改为 1,循环退出,程序正常退出。 -
优化编译(-O2 级别):
g++ volatile_test.cc -o volatile_test -O2 ./volatile_test按 Ctrl+C,虽然
sig_handler修改了flag为 1,但循环一直不退出!
4.1.3 为什么优化后会出错?(编译器的 "小聪明")
编译器的优化逻辑是:"while (!flag)是个空循环,flag在循环里没被修改,所以可以把flag读到寄存器里,每次检查寄存器里的值,不用每次都读内存(减少内存访问,提高效率)"。
- 没有
volatile时:编译器把flag加载到寄存器后,就不再读内存中的flag; - 信号处理函数修改的是内存中的
flag,寄存器中的flag还是 0,所以循环一直不退出。
4.2 volatile 的 "救命作用"(生活类比)
volatile就像 "强制刷新缓存":
- 没有
volatile:你把笔记本上的内容抄到便利贴(寄存器)上,之后只看便利贴,不管笔记本有没有被修改; - 有
volatile:你每次都必须看笔记本(内存),而不是便利贴(寄存器),确保看到的是最新内容。
4.2.1 加 volatile 后的代码(修复问题)
volatile int flag = 0; // 加上volatile关键字优化编译运行:
g++ volatile_test.cc -o volatile_test -O2
./volatile_test按 Ctrl+C,flag改为 1,循环退出,程序正常退出 ------volatile告诉编译器:"flag可能被意外修改,每次使用都要从内存中读取"。
4.3 volatile 的核心作用与常见误区
4.3.1 核心作用(仅 3 点,无其他!)
- 保证内存可见性:每次读取变量都从内存中读,每次修改都写入内存,避免编译器优化到寄存器;
- 禁止指令重排序 :编译器不会对
volatile变量的读写指令进行重排序(比如不会把flag = 1放到cout之前); - 不保证原子性 :
volatile不能替代锁!比如flag++(读 - 改 - 写三步),信号处理函数和主流程同时执行,仍可能数据错乱。
4.3.2 常见误区(避坑!)
| 误区 | 正确认知 |
|---|---|
| volatile 是原子操作 | 不是!volatile 只保证可见性,不保证原子性 |
| volatile 能保证线程安全 | 不能!多线程并发修改仍需加锁 |
| 所有共享变量都需要 volatile | 只有 "被意外修改" 的变量需要(如信号处理、硬件中断) |
4.4 volatile 的实用场景(总结)
- 信号处理函数中修改的全局变量(如
flag); - 硬件寄存器地址(如嵌入式系统中,寄存器的值可能被硬件自动修改);
- 多线程中被多个线程修改的变量(但需配合锁保证原子性)。
五、SIGCHLD 信号:"子进程的'死亡通知'与僵尸进程回收"
当子进程退出时,会给父进程发送SIGCHLD信号(17 号信号),父进程可以通过捕捉该信号,自动回收子进程资源,避免产生僵尸进程。
5.1 僵尸进程:"死而不僵的子进程"
5.1.1 什么是僵尸进程?(生活类比)
子进程退出后,会进入 "僵尸状态(Z 状态)"------ 相当于 "人去世了,但户口没注销":
- 子进程的 PID、退出状态等信息还保存在内核中;
- 父进程如果不回收,这些信息会一直占用资源(PID 是有限的,最多 65535 个);
- 僵尸进程无法通过
kill -9杀死(因为已经退出,只是没注销户口)。
5.1.2 僵尸进程的产生(代码示例)
#include <iostream>
#include <unistd.h>
#include <sys/wait.h>
using namespace std;
int main() {
pid_t pid = fork();
if (pid == 0) {
// 子进程:1秒后退出
cout << "子进程PID:" << getpid() << ",1秒后退出" << endl;
sleep(1);
exit(0); // 子进程退出,进入僵尸状态
} else {
// 父进程:无限循环,不回收子进程
cout << "父进程PID:" << getpid() << ",不回收子进程" << endl;
while (true) {
sleep(1);
}
}
return 0;
}查看僵尸进程:
# 编译运行
g++ zombie_test.cc -o zombie_test
./zombie_test
# 新终端执行:查看进程状态(Z表示僵尸进程)
ps aux | grep zombie_test输出中会看到子进程的状态是Z+(僵尸进程)。
5.2 SIGCHLD 信号:子进程的 "死亡通知"
子进程退出时,内核会自动给父进程发送SIGCHLD信号,该信号的默认处理动作是 "忽略"------ 如果父进程不处理,子进程就会变成僵尸进程。
5.2.1 捕捉 SIGCHLD 自动回收僵尸进程
cpp
#include <iostream>
#include <signal.h>
#include <unistd.h>
#include <sys/wait.h>
#include <sys/types.h>
using namespace std;
// SIGCHLD信号处理函数:回收僵尸进程
void sigchld_handler(int sig) {
cout << "\n=== 收到SIGCHLD信号(" << sig << "),开始回收僵尸进程 ===" << endl;
// 循环回收所有僵尸进程(关键!)
pid_t child_pid;
// waitpid参数:
// -1:回收所有子进程;
// NULL:不关心子进程的退出状态;
// WNOHANG:非阻塞,没有僵尸进程就返回0
while ((child_pid = waitpid(-1, NULL, WNOHANG)) > 0) {
cout << "成功回收僵尸进程,PID:" << child_pid << endl;
}
cout << "=======================\n" << endl;
}
int main() {
// 注册SIGCHLD信号处理函数
struct sigaction act;
act.sa_handler = sigchld_handler;
sigemptyset(&act.sa_mask);
act.sa_flags = SA_RESTART; // 系统调用自动重启
sigaction(SIGCHLD, &act, NULL);
// 创建3个子进程
for (int i = 0; i < 3; i++) {
pid_t pid = fork();
if (pid == 0) {
cout << "子进程PID:" << getpid() << ",3秒后退出" << endl;
sleep(3);
exit(i); // 子进程退出,触发SIGCHLD
}
}
// 父进程:正常业务逻辑
while (true) {
cout << "父进程运行中,PID:" << getpid() << endl;
sleep(1);
}
return 0;
}这段代码的核心目标是避免僵尸进程产生 :父进程通过sigaction注册 SIGCHLD 信号的处理函数,当子进程退出时,内核会向父进程发送 SIGCHLD 信号,触发处理函数执行;处理函数中通过waitpid循环回收所有已退出的子进程资源,从而彻底解决僵尸进程占用 PID 和内核资源的问题。
5.2.2 关键细节:为什么要用 while 循环回收?
常规信号(如 SIGCHLD)的特点是 "不排队 "------ 如果多个子进程同时退出,内核可能只发送一次 SIGCHLD 信号。如果用if (waitpid(...) > 0),只能回收一个僵尸进程,其他的会残留;用while循环可以一直回收,直到没有僵尸进程。
直接 waitpid与 "信号捕捉 + waitpid" 的核心区别
| 对比维度 | 直接 waitpid(阻塞 / 轮询) | SIGCHLD 信号捕捉 + waitpid 循环 |
|---|---|---|
| 父进程阻塞性 | - 阻塞式:父进程被完全卡住,无法处理其他业务;- 轮询式:父进程需不断循环查询,仍会占用 CPU | 父进程完全异步:正常执行业务,仅在子进程退出时触发回收,无阻塞 / 轮询 |
| 资源利用效率 | - 阻塞式:父进程资源闲置(无法做其他事);- 轮询式:CPU 空转(无僵尸进程时仍循环) | 高效:仅在有子进程退出时才执行回收逻辑,无额外消耗 |
| 业务处理能力 | 父进程只能等待子进程退出,或被迫轮询,无法专注自身业务(如服务器处理请求) | 父进程可持续处理核心业务(如网络服务、数据计算),回收逻辑 "按需触发" |
| 适用场景 | 父进程创建子进程后无需做其他事,只需等待子进程完成(如简单批处理任务) | 父进程需长期运行(如服务器、守护进程),需同时管理多个子进程 |
底层原理差异:同步等待 vs 异步通知
1. 直接 waitpid:"同步等待 / 轮询查询" 模式
- 阻塞式:父进程主动 "等" 子进程退出(同步阻塞),就像你站在快递柜前一直等快递,什么事都做不了;
- 轮询式:父进程主动 "问" 内核 "有没有子进程退出"(同步轮询),就像你每隔 1 分钟去快递柜看一眼,中间可以做其他事,但仍会频繁打断自己。
2. 信号捕捉 + waitpid:"异步通知" 模式
内核扮演 "快递员" 角色:子进程退出时,内核主动给父进程发 SIGCHLD "通知"(而非父进程主动问),父进程收到通知后再去 "取快递"(回收子进程)。这种模式符合 **"事件驱动" 设计 **,是 Linux 系统中管理子进程的最优解。
关键细节:为什么信号 + waitpid 更可靠?
- 处理 "批量子进程退出" :若多个子进程同时退出,直接轮询可能因 "查询间隔" 导致僵尸进程短暂残留;而信号 +
while循环能一次性回收所有僵尸进程(解决信号不排队问题)。 - 适配长期运行进程:服务器进程需 7×24 小时运行,若用直接 waitpid 会导致服务中断;信号机制能让进程在 "不感知子进程" 的情况下持续提供服务。
总结
- 直接 waitpid是 "主动找事做",适合父进程无需长期运行的简单场景;
- SIGCHLD 信号 + waitpid是 "有事才做",是异步化、高效率的子进程管理方案,适合需要长期运行的服务型进程。
5.2.3 额外技巧:忽略 SIGCHLD 自动回收
在 Linux 系统中,若父进程将 SIGCHLD 的处理动作设为SIG_IGN(在创建子进程之前),内核会自动回收子进程,无需手动调用waitpid:
cpp
#include <signal.h>
#include <unistd.h>
using namespace std;
int main() {
// 忽略SIGCHLD信号,内核自动回收子进程
struct sigaction act;
act.sa_handler = SIG_IGN;
sigaction(SIGCHLD, &act, NULL);
// 创建子进程
if (fork() == 0) {
cout << "子进程PID:" << getpid() << ",1秒后退出" << endl;
sleep(1);
exit(0);
}
// 父进程无限循环
while (true) {
sleep(1);
}
return 0;
}验证 :子进程退出后,用ps aux | grep 进程名查看,不会出现僵尸进程(状态 Z)。
5.3 僵尸进程的危害与解决总结
5.3.1 僵尸进程的危害
- 占用 PID 资源:PID 是有限的(默认 65535 个),僵尸进程过多会导致无法创建新进程;
- 占用内核资源:僵尸进程的 PCB(进程控制块)会一直保存在内核中,消耗内存。
5.3.2 解决方法(3 种)
| 方法 | 适用场景 | 优点 | 缺点 |
|---|---|---|---|
| 父进程调用 waitpid 循环回收 | 父进程需要知道子进程的退出状态 | 可以获取子进程退出码,灵活控制 | 需要编写信号处理函数 |
| 父进程忽略 SIGCHLD 信号 | 父进程不关心子进程退出状态 | 代码简洁,无需手动回收 | 无法获取子进程退出状态 |
| 父进程先于子进程退出,子进程被 init 收养 | 父进程无需长期运行 | init 进程(PID=1)会自动回收子进程 | 父进程无法再与子进程通信 |
结语:于细节处见真章,于探索中得成长
敲完最后一行代码,看着终端里父进程稳稳运行、子进程退出后被优雅回收,没有僵尸进程的残留,没有信号处理的错乱,心里忽然涌起一种很踏实的成就感 ------ 这大概就是系统编程的魅力:那些看似抽象的 "信号""中断""内核态",最终都能在一行行代码里找到具象的落点,那些曾让我们困惑的 "为什么",也会在层层拆解后变成豁然开朗的 "原来是这样"。
我们从 "按 Ctrl+C 终止程序" 这个最日常的操作出发,一步步剥开了信号的外衣:原来按下快捷键的瞬间,键盘会触发硬件中断,内核将其转化为 SIGINT 信号;原来信号递达时,进程要在用户态和内核态之间来回切换,要保存上下文、检查未决集、执行处理函数,这一切都藏在操作系统 "中断驱动" 的底层逻辑里。我们曾以为 "调用 write 函数" 只是简单的 "写数据",却没想到 glibc 早已帮我们封装好寄存器传参、syscall 触发、错误码处理的细节,内核里的系统调用表正以编号为索引,精准匹配着每一个底层请求。
那些踩过的坑更让我们印象深刻:忘记加 volatile 导致编译器优化吃掉了 flag 的修改,用全局变量写链表插入函数导致信号处理打断主流程时数据错乱,直接 waitpid 让父进程卡在原地无法处理业务...... 这些 "意外" 恰恰是理解系统的钥匙 ------ 它让我们明白,操作系统的每一个设计(比如可重入函数的规则、信号的异步性、volatile 的内存可见性),都是在平衡 "效率" 与 "安全",在 "并发执行" 与 "资源共享" 之间寻找最优解。就像 SIGCHLD 信号的处理,从 "阻塞 waitpid" 到 "信号捕捉 + 非阻塞循环回收",本质上是从 "同步等待" 到 "异步通知" 的思维跃迁,这不仅是技术的选择,更是操作系统 "事件驱动" 哲学的体现。
学习 Linux 系统编程的过程,像极了拆解一台精密的钟表:我们从表盘上的指针(表象)入手,慢慢打开外壳,看到齿轮的咬合(系统调用、中断),再深入到发条的驱动(内核机制)。一开始会被密密麻麻的零件吓到,但当我们搞懂 "每个齿轮的作用""为什么这个零件要放在这里",就会惊叹于设计者的巧思 ------ 原来那些看似复杂的机制,本质都是为了解决最朴素的问题:如何让进程更安全地运行?如何让资源更高效地利用?如何让系统更稳定地响应?
或许你会觉得这些底层知识 "离业务很远",但当你在写服务器代码时,能理解为什么信号处理函数要尽量简单;当你排查线上僵尸进程问题时,能立刻想到 SIGCHLD 的回收逻辑;当你优化程序性能时,能意识到系统调用的开销与 glibc 的封装策略...... 这些藏在细节里的认知,会让你跳出 "只写业务代码" 的局限,拥有 "看透系统运行本质" 的底气。
系统的世界没有捷径,却处处有惊喜。今天我们弄懂了信号的处理流程,明天或许就能探索进程调度的时间片轮转,后天还能钻进文件系统的 inode 结构里看一看。那些曾让我们头疼的 "中断向量表""PCB 结构""系统调用号",终会在反复实践中变成我们的 "老朋友"。
所以,别停下探索的脚步。当你对着内核源码里的 sys_call_table 发呆时,当你为调试一个信号处理的 bug 熬到深夜时,记得:我们正在靠近系统的真相,正在把 "知其然" 变成 "知其所以然"。而这份 "刨根问底" 的执着,终将成为我们技术路上最珍贵的行囊。
Linux 的世界永远向好奇者敞开,下一个知识点,下一个问题,下一次拆解,都在等着我们 ------ 就像信号总会抵达,答案也总会在探索中浮现。继续往前走吧,于细节处见真章,于探索中得成长,我们终会在底层的逻辑里,找到属于自己的清晰与笃定。