EasyAR版本为:EasyARSenseUnityPlugin_4.6.3+3029.cb846598
OpenCV for Unity3d版本为:OpenCV for Unity 3.0.0
二、测试OpenCV USB相机
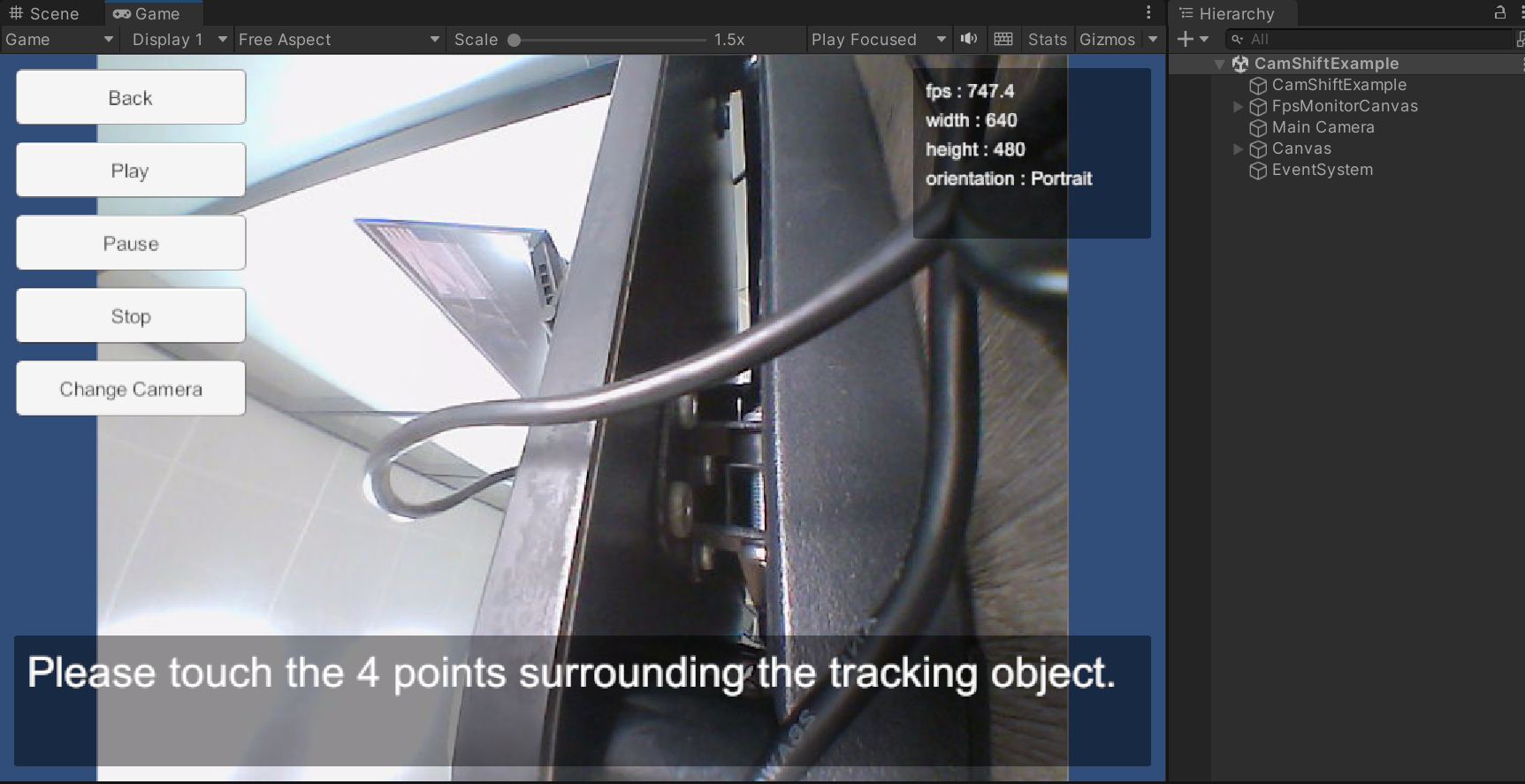
导入OpenCV,打开示例CamShiftExample(路径:Assets\OpenCVForUnity\Examples\MainModules\video\CamShiftExample)
可看到USB摄像头视频。
二、测试EasyAR图片识别
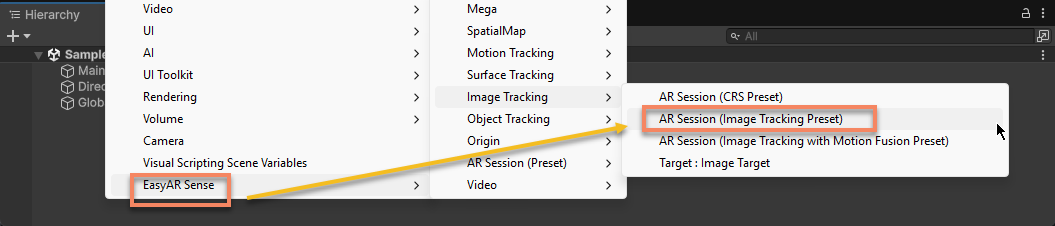
导入EasyAR()
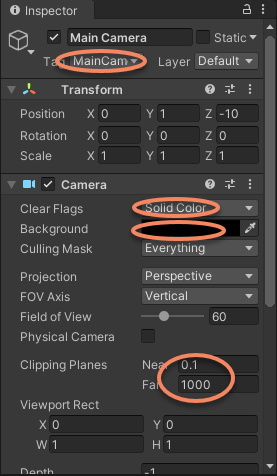
选中 Main Camera, 在 Inspector 设置以下参数。
- 设置
Clear Flags为Solid Color。 - 设置
Background为黑色。 - 设置
Clipping Planes的Near为 0.1(米),Far为 1000(米)。
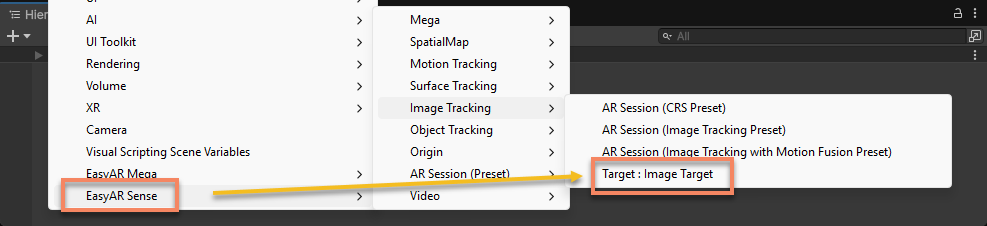
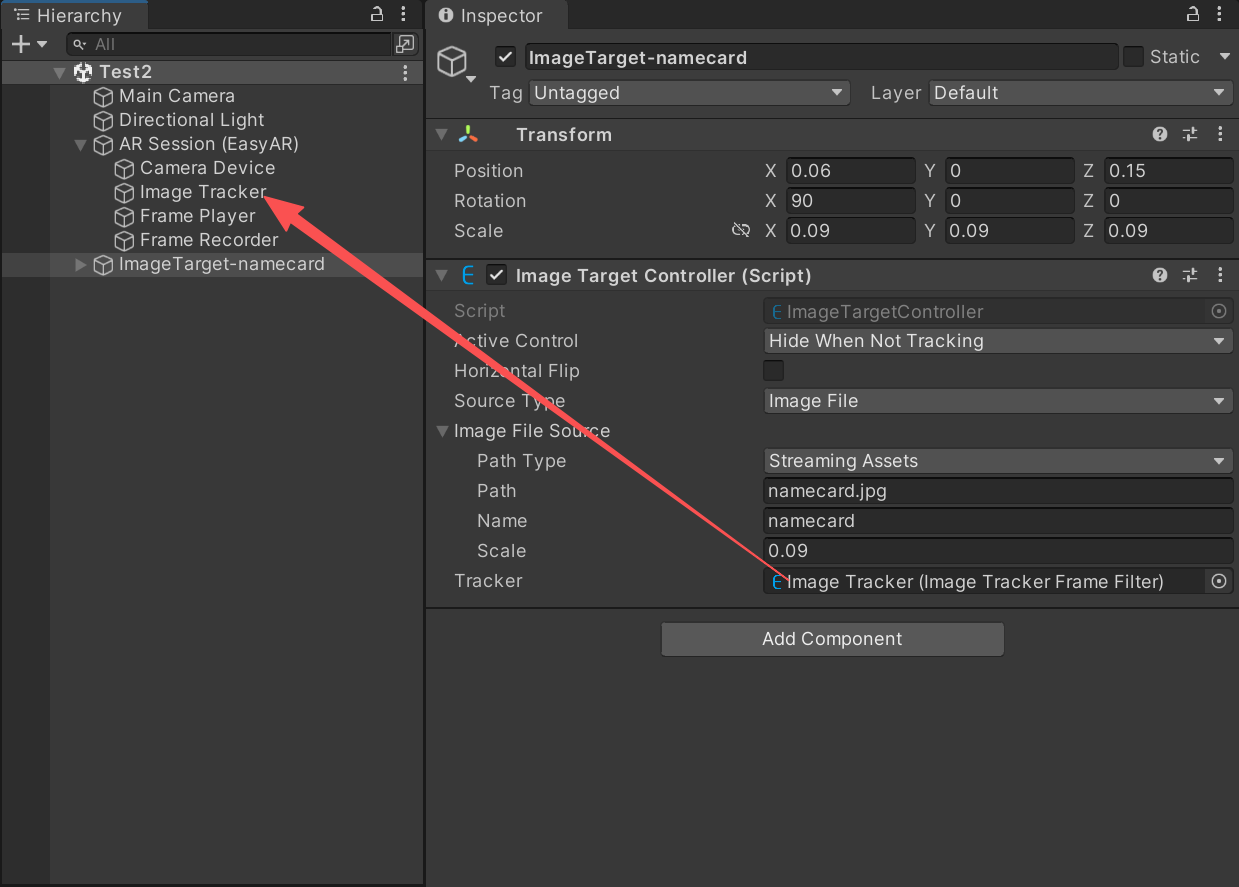
- 设置 Name 为 namecard。
- 设置 Scale 为 0.09(表示 0.09 米)。
- 设置 Tracker 为 ARSession 下的
ImageTrackerFrameFilter。
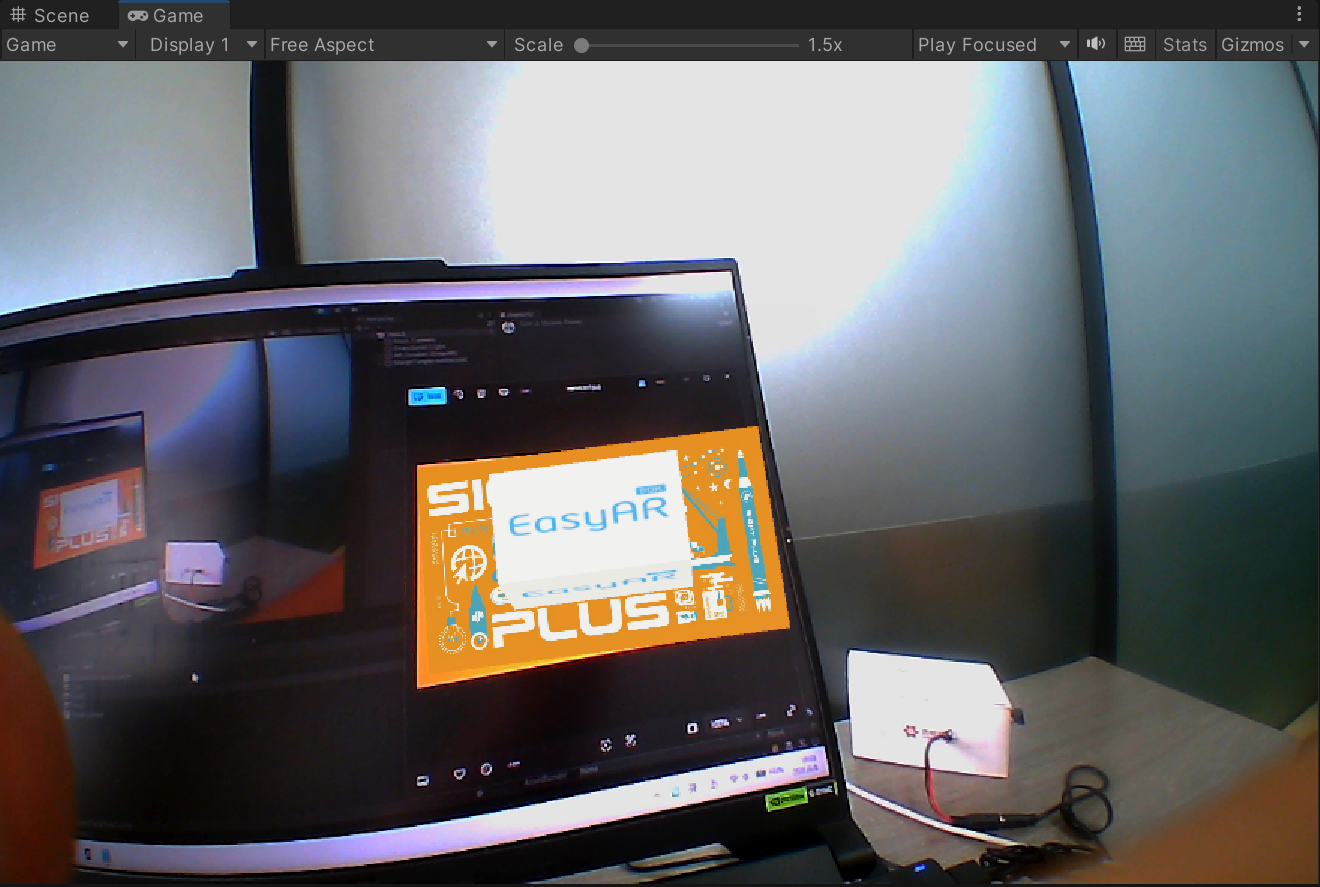
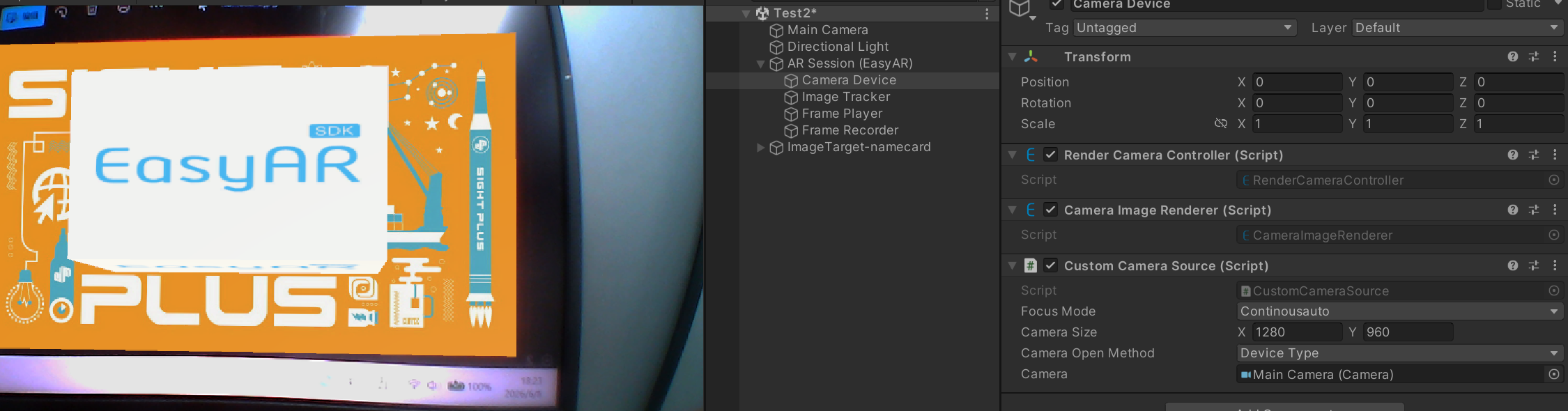
运行程序,测试可以识别图片
三、自定义相机
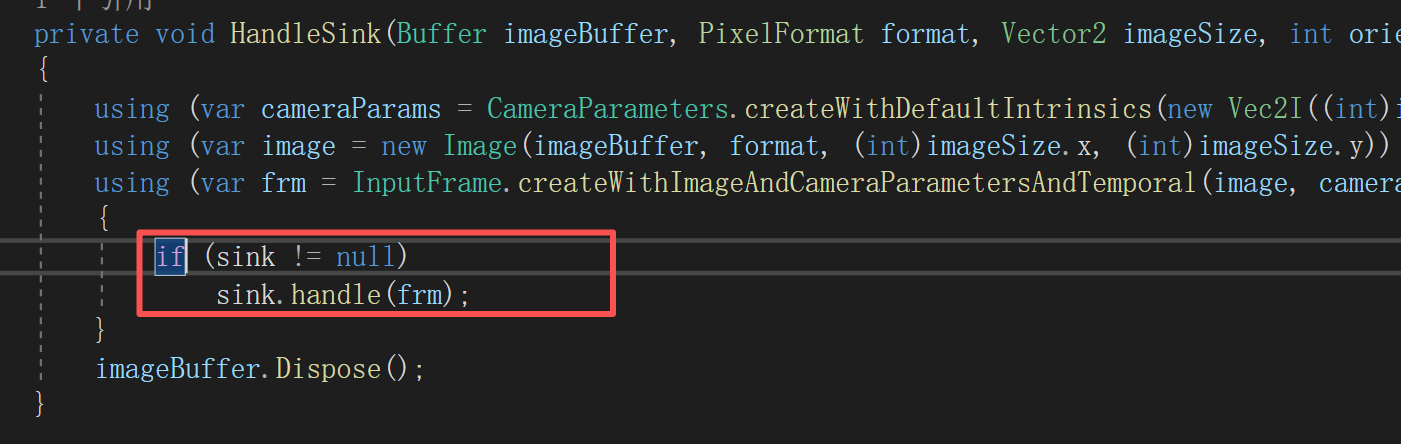
创建脚本CustomCameraSource,派生于FrameSource,将CameraDeviceFrameSource全部复制到CustomCameraSource中。
复制代码的原因是确保sink不为null
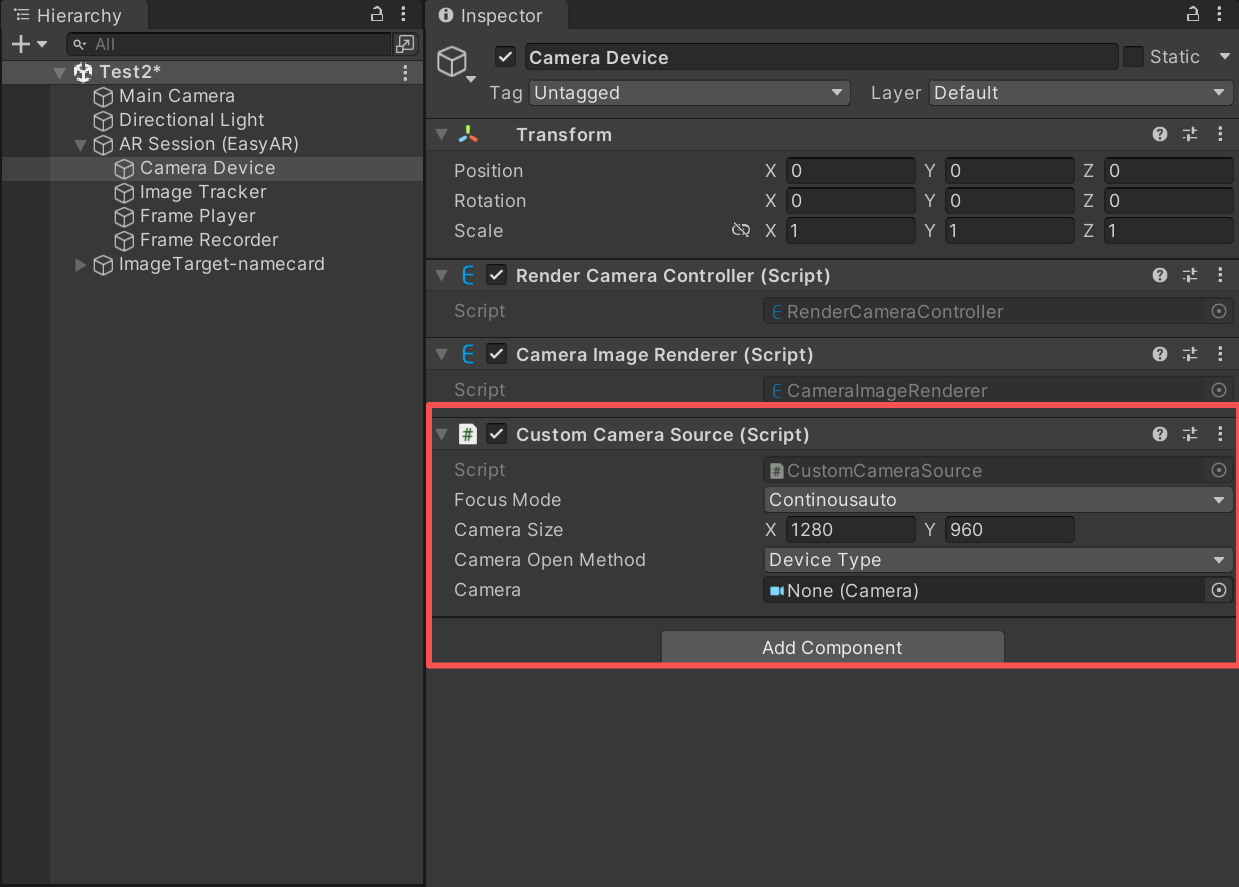
然后,移除Camera Device上的CameraDeviceFrameSource(重要!一定要移除,禁用该脚本无效),在Camera Device添加CustomCameraSource,测试运行识别。
在CustomCameraSource添加如下代码:
cs
private void Start()
{
_multiSource2MatHelper = gameObject.GetComponent<MultiSource2MatHelper>();
_multiSource2MatHelper.OutputColorFormat = Source2MatHelperColorFormat.RGB;
_multiSource2MatHelper.Initialize();
}
byte[] byteArrays;
easyar.Buffer buffer;
private void Update()
{
if (_multiSource2MatHelper.IsPlaying() && _multiSource2MatHelper.DidUpdateThisFrame())
{
Mat mat1 = _multiSource2MatHelper.GetMat();
if (mat1 == null || mat1.empty())
return;
if (byteArrays == null || byteArrays.Length != (mat1.cols() * mat1.rows() * 3))
{
byteArrays = new byte[mat1.cols() * mat1.rows() * 3];
}
var imageWidth = mat1.cols();
var imageHeight = mat1.rows();
var imageSize = new Vector2(imageWidth, imageHeight);
Marshal.Copy((IntPtr)mat1.dataAddr(), byteArrays, 0, mat1.cols() * mat1.rows() * 3);
buffer = easyar.Buffer.wrapByteArray(byteArrays);
var format = PixelFormat.RGB888;
int orientation = 0;
int cameraType = 1;
double timestamp = Time.realtimeSinceStartup;
HandleSink(buffer, format, imageSize, orientation, cameraType, timestamp);
}
}
private void HandleSink(Buffer imageBuffer, PixelFormat format, Vector2 imageSize, int orientation, int cameraType, double timestamp)
{
using (var cameraParams = CameraParameters.createWithDefaultIntrinsics(new Vec2I((int)imageSize.x, (int)imageSize.y), (CameraDeviceType)cameraType, orientation))
using (var image = new Image(imageBuffer, format, (int)imageSize.x, (int)imageSize.y))
using (var frm = InputFrame.createWithImageAndCameraParametersAndTemporal(image, cameraParams, timestamp))
{
if (sink != null)
sink.handle(frm);
}
imageBuffer.Dispose();
}在CameraDevice上添加MultiSource2MatHelper
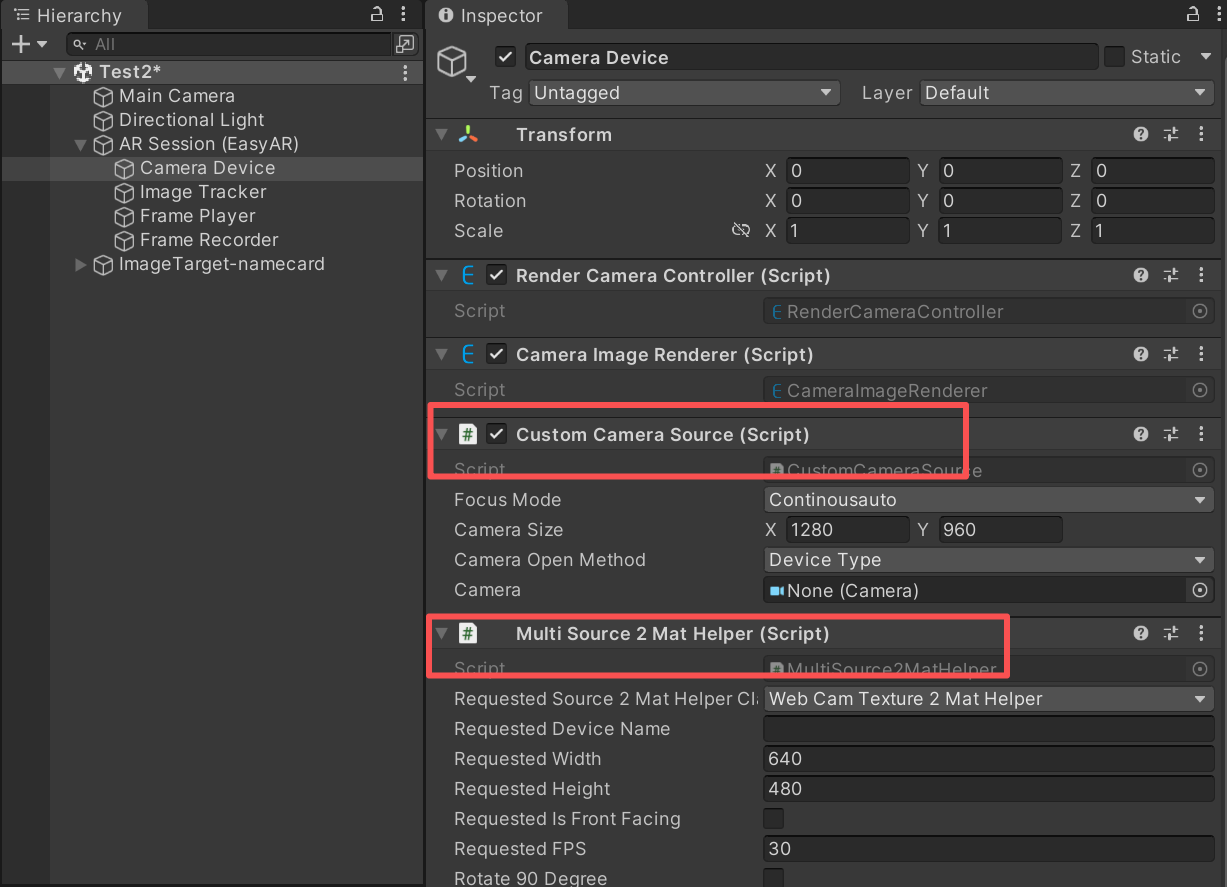
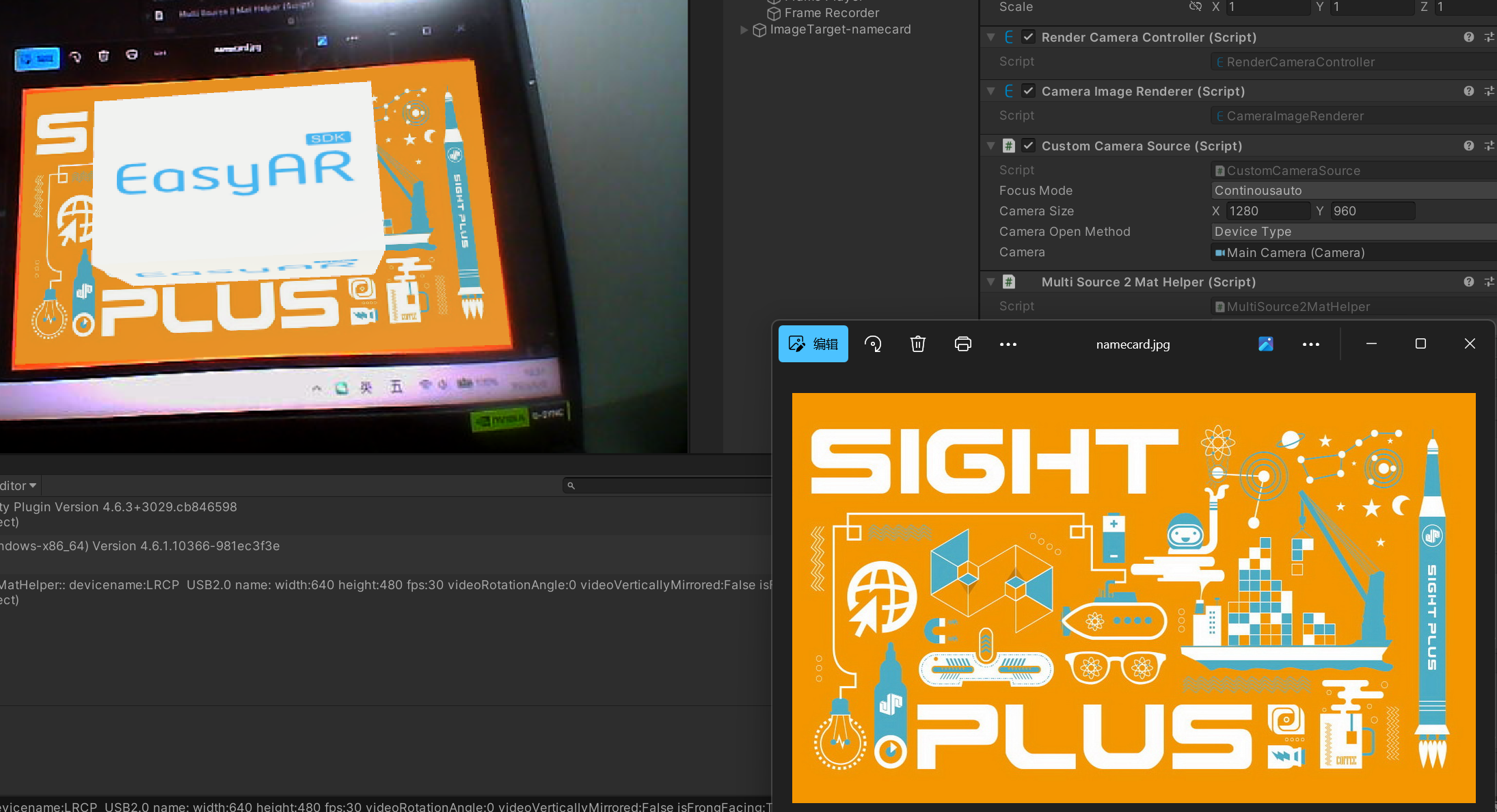
测试运行,发现可以使用自定义相机了
CustomCameraSource全部代码为
cs
//================================================================================================================================
//
// Copyright (c) 2015-2023 VisionStar Information Technology (Shanghai) Co., Ltd. All Rights Reserved.
// EasyAR is the registered trademark or trademark of VisionStar Information Technology (Shanghai) Co., Ltd in China
// and other countries for the augmented reality technology developed by VisionStar Information Technology (Shanghai) Co., Ltd.
//
//================================================================================================================================
using easyar;
using OpenCVForUnity.CoreModule;
using OpenCVForUnity.ImgcodecsModule;
using OpenCVForUnity.ImgprocModule;
using OpenCVForUnity.UnityIntegration.Helper.Source2Mat;
using OpenCVForUnity.UnityUtils;
using System;
using System.Collections;
using System.Collections.Generic;
using System.Runtime.InteropServices;
using UnityEngine;
using Buffer = easyar.Buffer;
public class CustomCameraSource : FrameSource
{
private MultiSource2MatHelper _multiSource2MatHelper;
/// <summary>
/// <para xml:lang="en">EasyAR Sense API. Accessible between <see cref="DeviceCreated"/> and <see cref="DeviceClosed"/> event if available.</para>
/// <para xml:lang="zh">EasyAR Sense API,如果功能可以使用,可以在<see cref="DeviceCreated"/>和<see cref="DeviceClosed"/>事件之间访问。</para>
/// </summary>
/// <senseapi/>
public CameraDevice Device { get; private set; }
/// <summary>
/// <para xml:lang="en">Focus mode used only when create <see cref="Device"/>.</para>
/// <para xml:lang="zh">创建<see cref="Device"/>时使用的聚焦模式,只在创建时使用。</para>
/// </summary>
public CameraDeviceFocusMode FocusMode = CameraDeviceFocusMode.Continousauto;
/// <summary>
/// <para xml:lang="en">Camera preview size used only when create <see cref="Device"/>.</para>
/// <para xml:lang="zh">创建<see cref="Device"/>时使用的图像大小,只在创建时使用。</para>
/// </summary>
public Vector2 CameraSize = new Vector2(1280, 960);
/// <summary>
/// <para xml:lang="en">Camera open method used only when create <see cref="Device"/>.</para>
/// <para xml:lang="zh">创建<see cref="Device"/>时使用的方法,只在创建时使用。</para>
/// </summary>
public CameraDeviceOpenMethod CameraOpenMethod = CameraDeviceOpenMethod.DeviceType;
/// <summary>
/// <para xml:lang="en">Camera type used only when create <see cref="Device"/>, used when <see cref="CameraOpenMethod"/> == <see cref="CameraDeviceOpenMethod.DeviceType"/>.</para>
/// <para xml:lang="zh">创建<see cref="Device"/>时使用的Camera类型,只在创建时<see cref="CameraOpenMethod"/> == <see cref="CameraDeviceOpenMethod.DeviceType"/>的时候使用。</para>
/// </summary>
[HideInInspector, SerializeField]
public CameraDeviceType CameraType = CameraDeviceType.Back;
/// <summary>
/// <para xml:lang="en">Camera index used only when create <see cref="Device"/>, used when <see cref="CameraOpenMethod"/> == <see cref="CameraDeviceOpenMethod.DeviceIndex"/>.</para>
/// <para xml:lang="zh">创建<see cref="Device"/>时使用的设备索引,只在创建时<see cref="CameraOpenMethod"/> == <see cref="CameraDeviceOpenMethod.DeviceIndex"/>的时候使用。</para>
/// </summary>
[HideInInspector, SerializeField]
public int CameraIndex = 0;
private static IReadOnlyList<ARSession.ARCenterMode> availableCenterMode = new List<ARSession.ARCenterMode> { ARSession.ARCenterMode.FirstTarget, ARSession.ARCenterMode.Camera, ARSession.ARCenterMode.SpecificTarget };
[HideInInspector, SerializeField]
private CameraDevicePreference cameraPreference = CameraDevicePreference.PreferObjectSensing;
private CameraParameters parameters = null;
private bool willOpen;
private bool disableAutoOpen;
/// <summary>
/// <para xml:lang="en">Event when <see cref="Device"/> created.</para>
/// <para xml:lang="zh"><see cref="Device"/> 创建的事件。</para>
/// </summary>
public event Action DeviceCreated;
/// <summary>
/// <para xml:lang="en">Event when <see cref="Device"/> opened.</para>
/// <para xml:lang="zh"><see cref="Device"/> 打开的事件。</para>
/// </summary>
public event Action DeviceOpened;
/// <summary>
/// <para xml:lang="en">Event when <see cref="Device"/> closed.</para>
/// <para xml:lang="zh"><see cref="Device"/> 关闭的事件。</para>
/// </summary>
public event Action DeviceClosed;
/// <summary>
/// <para xml:lang="en">Open method of <see cref="CameraDevice"/>.</para>
/// <para xml:lang="zh"><see cref="CameraDevice"/>开启方式。</para>
/// </summary>
public enum CameraDeviceOpenMethod
{
/// <summary>
/// <para xml:lang="en">Open <see cref="CameraDevice"/> type.</para>
/// <para xml:lang="zh">根据<see cref="CameraDevice"/>的类型打开<see cref="CameraDevice"/>。</para>
/// </summary>
DeviceType,
/// <summary>
/// <para xml:lang="en">Open <see cref="CameraDevice"/> index.</para>
/// <para xml:lang="zh">根据<see cref="CameraDevice"/>的索引打开<see cref="CameraDevice"/>。</para>
/// </summary>
DeviceIndex,
}
public override Optional<InputFrameSourceType> Type { get => Device != null ? Device.inputFrameSourceType() : Optional<InputFrameSourceType>.Empty; }
public override Optional<bool> IsAvailable { get => CameraDevice.isAvailable(); }
public override IReadOnlyList<ARSession.ARCenterMode> AvailableCenterMode { get => availableCenterMode; }
public override int BufferCapacity
{
get
{
if (Device != null)
{
return Device.bufferCapacity();
}
return bufferCapacity;
}
set
{
bufferCapacity = value;
if (Device != null)
{
Device.setBufferCapacity(value);
}
}
}
/// <summary>
/// <para xml:lang="en">Camera preference used only when create <see cref="Device"/>. It will switch focus mode to the preferred value, change the focus after this value changed if it not the desired case.</para>
/// <para xml:lang="zh">创建<see cref="Device"/>时使用的Camera偏好设置,只在创建时使用。它会同时控制对焦模式到推荐使用值,如果需要使用特定对焦模式,需要在修改这个值之后重新设置对焦模式。</para>
/// </summary>
public CameraDevicePreference CameraPreference
{
get { return cameraPreference; }
// Switch to preferred FocusMode when switch CameraPreference.
// You can set other FocusMode after this, but the tracking results may differ.
set
{
cameraPreference = value;
FocusMode = CameraDeviceSelector.getFocusMode(cameraPreference);
}
}
/// <summary>
/// <para xml:lang="en">Camera parameters used only when create <see cref="Device"/>. It is for advanced usage and will overwrite other values like <see cref="CameraSize"/>.</para>
/// <para xml:lang="zh">创建<see cref="Device"/>时使用的相机参数,只在创建时使用。这个参数是高级设置,会覆盖<see cref="CameraSize"/>等其它值。</para>
/// </summary>
public CameraParameters Parameters
{
get
{
if (Device != null)
{
return Device.cameraParameters();
}
return parameters;
}
set
{
parameters = value;
}
}
protected override void OnEnable()
{
base.OnEnable();
if (Device != null)
{
Device.start();
}
}
protected override void OnDisable()
{
base.OnDisable();
if (Device != null)
{
Device.stop();
}
}
protected virtual void OnDestroy()
{
Close();
}
public override void OnAssemble(ARSession session)
{
base.OnAssemble(session);
StartCoroutine(AutoOpen());
}
/// <summary>
/// <para xml:lang="en">Open device.</para>
/// <para xml:lang="zh">打开设备。</para>
/// </summary>
public void Open()
{
disableAutoOpen = true;
willOpen = true;
CameraDevice.requestPermissions(EasyARController.Scheduler, (Action<PermissionStatus, string>)((status, msg) =>
{
if (!willOpen)
{
return;
}
if (status != PermissionStatus.Granted)
{
throw new UIPopupException("Camera permission not granted");
}
Close();
Device = CameraDeviceSelector.createCameraDevice(CameraPreference);
if (DeviceCreated != null)
{
DeviceCreated();
}
bool openResult = false;
switch (CameraOpenMethod)
{
case CameraDeviceOpenMethod.DeviceType:
openResult = Device.openWithPreferredType(CameraType);
break;
case CameraDeviceOpenMethod.DeviceIndex:
openResult = Device.openWithIndex(CameraIndex);
break;
default:
break;
}
if (!openResult)
{
Debug.LogError("Camera open failed");
Device.Dispose();
Device = null;
return;
}
Device.setFocusMode(FocusMode);
Device.setSize(new Vec2I((int)CameraSize.x, (int)CameraSize.y));
if (parameters != null)
{
Device.setCameraParameters(parameters);
}
if (bufferCapacity != 0)
{
Device.setBufferCapacity(bufferCapacity);
}
if (sink != null)
{
Device.inputFrameSource().connect(sink);
}
if (DeviceOpened != null)
{
DeviceOpened();
}
if (enabled)
{
OnEnable();
}
}));
}
/// <summary>
/// <para xml:lang="en">Close device.</para>
/// <para xml:lang="zh">关闭设备。</para>
/// </summary>
public void Close()
{
disableAutoOpen = true;
willOpen = false;
if (Device != null)
{
OnDisable();
Device.close();
Device.Dispose();
if (DeviceClosed != null)
{
DeviceClosed();
}
Device = null;
}
}
public override void Connect(InputFrameSink val)
{
base.Connect(val);
if (Device != null)
{
Device.inputFrameSource().connect(val);
}
}
private IEnumerator AutoOpen()
{
while (!enabled)
{
if (disableAutoOpen) { yield break; }
yield return null;
}
if (disableAutoOpen) { yield break; }
if (IsAvailable.OnNone || !IsAvailable.Value) { throw new UIPopupException(typeof(CameraDevice) + " not available"); }
Open();
}
private void Start()
{
_multiSource2MatHelper = gameObject.GetComponent<MultiSource2MatHelper>();
_multiSource2MatHelper.OutputColorFormat = Source2MatHelperColorFormat.RGB;
_multiSource2MatHelper.Initialize();
}
byte[] byteArrays;
easyar.Buffer buffer;
private void Update()
{
if (_multiSource2MatHelper.IsPlaying() && _multiSource2MatHelper.DidUpdateThisFrame())
{
Mat mat1 = _multiSource2MatHelper.GetMat();
if (mat1 == null || mat1.empty())
return;
if (byteArrays == null || byteArrays.Length != (mat1.cols() * mat1.rows() * 3))
{
byteArrays = new byte[mat1.cols() * mat1.rows() * 3];
}
var imageWidth = mat1.cols();
var imageHeight = mat1.rows();
var imageSize = new Vector2(imageWidth, imageHeight);
Marshal.Copy((IntPtr)mat1.dataAddr(), byteArrays, 0, mat1.cols() * mat1.rows() * 3);
buffer = easyar.Buffer.wrapByteArray(byteArrays);
var format = PixelFormat.RGB888;
int orientation = 0;
int cameraType = 1;
double timestamp = Time.realtimeSinceStartup;
HandleSink(buffer, format, imageSize, orientation, cameraType, timestamp);
}
}
private void HandleSink(Buffer imageBuffer, PixelFormat format, Vector2 imageSize, int orientation, int cameraType, double timestamp)
{
using (var cameraParams = CameraParameters.createWithDefaultIntrinsics(new Vec2I((int)imageSize.x, (int)imageSize.y), (CameraDeviceType)cameraType, orientation))
using (var image = new Image(imageBuffer, format, (int)imageSize.x, (int)imageSize.y))
using (var frm = InputFrame.createWithImageAndCameraParametersAndTemporal(image, cameraParams, timestamp))
{
if (sink != null)
sink.handle(frm);
}
imageBuffer.Dispose();
}
}