1. 随机变量
随机变量:一个函数,它将随机试验的每一个可能结果映射到一个数值上。它的取值是随机的,但其概率分布是固定的。
随机变量主要使用均值和方差来表达。
2. 随机过程
随机过程:是一族随机变量 {X(t),t∈T}{X(t),t∈T},其中 t 通常代表时间。在每个固定的时间点 t,X(t) 是一个随机变量;但不同时间点的随机变量之间有关联,并且整体呈现出某种演变规律。
随机过程用均值函数、方差函数、自相关函数和功率谱密度来表达。
对于宽平稳随机过程,均值函数等于常值,方差函数等于常值。自相关函数的傅立叶变换等于功率谱密度。我们进一步考虑均值为0的宽平稳随机过程(因为工程中一般假设为白噪声)。
于是平稳随机过程的方差为:
上式是假设白噪声的功率谱为常值
在实际中平稳随机过程(如白噪声)的功率不可能是负无穷到正无穷都是常值。否则功率为无穷大。
上式中B为信号带宽。噪声信号使用时通常被采样了,信号带宽被限制在了信号采样频率的一半。
注意:随机过程中前后时间点的关联程度,决定了建模类型,强关联建模马尔可夫过程 (Markov Process),无关联建模纯随机过程 / 白噪声 (White Noise),特定时间点关联建模独立增量过程 (Independent Increments Process)。布朗运动既是尔可夫过程也具有独立增量过程。
3. 随机变量的累加问题-随机游走
随机游走 是一个非常直观又极其重要的随机过程。你可以把它理解为一个物体在离散时间点上,每次随机走一步所形成的路径。随机游走的数据模型如下。
随机游走的均值和方差
可见:
随机游走的均值与步数或者时间正比.
随机游走的方差与步数或者时间正比。
随机游走的系数就是随机变量的方差或者标准差。
随机游走的标准差,是与总步数或者总时间的平方根成正比。
4. 白噪声随机过程的积分问题-连续随机游走
首先解释一下为什么专门分析这类问题:因为无论是通信系统还是分析IMU零偏不稳定性时,都要对随机变量进行积分。首先,假设观测信号量的公式如下。
在通信系统和分析IMU的零偏不稳定性时,都需要对上述量进行(0,T)区间的积分。进而得到周期为T的采样值,作为信号分析的依据。如下式,等式右侧第一项为有用信号量积分,等式右侧第二项为噪声量积分。
很明显,白噪声积分的均值仍然为0,于时积分的方差如下。
根据白噪声自相关函数和功率普的转换关系,白噪声积分的方差。
可见:
白噪声的积分后的均值为0。
白噪声积分后的方差就是白噪声的功率普乘以积分时间T。
白噪声的积分后的方差随积分时间成正比增长。和离散的随机游走是一致的。
随机游走的系数就是平稳随机过程的功率 谱**(白噪声功率普)/2。**
就是积分结果的不稳定性(此处表达的是方差),通常等于IMU不稳定指标的平方。
注意:这个公式是通过器件指标反求器件噪声功率谱的重要依据,求出噪声功率谱就可以求出噪声信号的方差,进而得到Q阵。
5. IMU的随机游走和零偏不稳定性
5.1 IMU 随机游走是白噪声模型
IMU的陀螺仪模型:
IMU的加速度计模型:
其中是陀螺仪的观测噪声,反映出陀螺仪的角度随机游走系数
;
由第三节随机游走和第四节白噪声积分过程的介绍,陀螺仪的噪声功率普可以陀螺仪的角度随机游走指标计算。再乘以采样频率/2。便可以得到随机变量的方差。
5.2 IMU 零偏不稳定性并不是白噪声模型
IMU测量的噪声分为两部分,白噪声部分是随机游走,零偏不稳定性部分即零偏噪声并不是白噪声。所以以下推导是错误的,
为零偏噪声,T_corr为相关时间,IMU 零偏不稳定性是由如下随机变量的方差计算而得到。
由第三节随机游走和第四节白噪声积分过程的介绍,陀螺仪的零偏噪声功率普可以由陀螺仪的零偏不稳定性除以相关时间计算,再乘以采样频率/2。便可以得到随机变量的方差。
5.3 IMU 零偏不稳定性是采用马尔科夫模型
IMU的下一时刻的零偏值,依赖于当前时刻的零偏值和一个白噪声驱动。
一般表示低频漂移的均值稳定度 (如 Allan 方差平直段),建模时常作为有限带宽的一阶马尔可夫过程。 b(t)是零偏,是驱动零偏的白噪声,一阶马尔可夫过程的公式建模如下。
假设零偏永远不回弹,误差随时间无限累积。模型可以简化为下式。
零偏噪声模型 的核心是假设零偏随时间作随机游走,因此零偏的变化率就是一个高斯白噪声。由第四节的理论可以得到零偏噪声的功率谱,由第二节的结论可以得到零偏噪声的方差。
6. 多元融合中IMU的噪声模型
6.1 Q阵(过程噪声阵)和R(观测噪声)的定义
IMU/GPS 组合通常采用ESKF,误差方程和观测方程如下所示。
对方程进行离散化,取一阶泰勒展开,
于是系统噪声转移可以写成如下公式:
其中Q阵为下式,在第五节中已经求解,是高斯噪声的方差。N 是第5.1节n和5.3节w组成的向量。
可见Q矩阵可以由IMU的随机游走和零偏不稳定性得到。
R矩阵由GPS的精度指示得到。
6.1  阵的定义和计算
阵的定义和计算
剩下的问题解决这个矩阵和矩阵
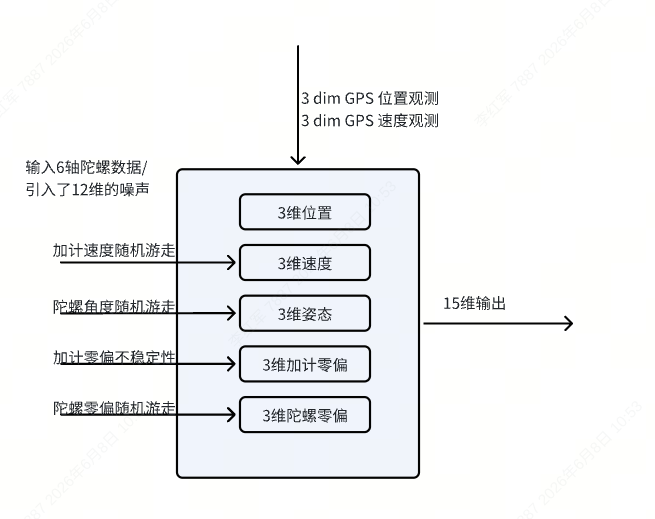
,就可以解决组合导航的噪声模型了。15维状态变量位置、速度、姿态、陀螺仪零偏的变化率,加计零偏的变化率如下所示。
15维状态变量误差的变化率,其中由于噪声引起的部分可以写成
无噪声影响
12维的输入噪声,按照上述规则带入到了15维的状态中,矩阵和
矩阵可以写成15*12的格式。