本文将从零开始带大家实现一个基于 PyTorch 的 20 类食物图像分类项目,涵盖数据集准备→自定义 Dataset→CNN 网络搭建→模型训练→测试评估完整流程。
我们将按照工业界标准流程,一步步完成:
- 数据集标签文件自动生成
- PyTorch 自定义 Dataset 类构建
- DataLoader 批量数据加载
- CNN 卷积神经网络搭建
- 模型训练与测试评估
全程附完整可运行代码,以及 Windows 环境下常见坑点解决方案。
目录
[三、自定义数据集类 food_dataset](#三、自定义数据集类 food_dataset)
[四、DataLoader 数据加载与 CNN 网络搭建](#四、DataLoader 数据加载与 CNN 网络搭建)
一、数据集标签文件生成
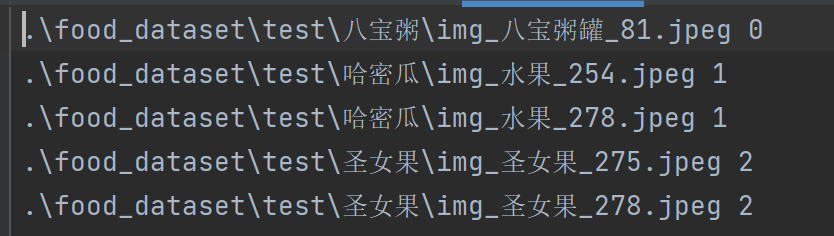
在深度学习训练中,我们需要建立「图片路径 → 分类标签」的映射关系。最通用、最易维护的方式就是生成标签 txt 文件,每行格式如下图:图片完整路径+数字标签
本项目要求数据集遵循以下层级结构:
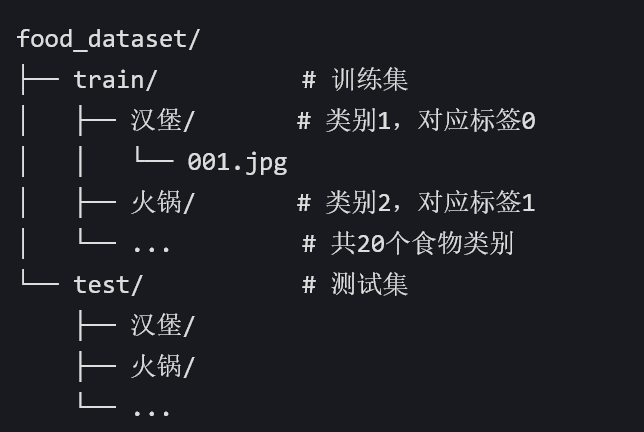
train 和 test 目录下必须是一级类别子文件夹,图片直接放在类别文件夹内。禁止直接在 train 下放图片,也禁止多层嵌套,否则后面的遍历脚本会乱。
接下来就是自动生成标签文件的代码。我写了一个函数叫train_test_file,给它传入数据集根目录和需要处理的子集名('train','test'),它就会在同级目录下生成对应的train.txt或test.txt。
python
import os
def train_test_file(root, dir):
"""
自动遍历数据集文件夹,生成图片路径+数字标签的txt文件
:param root: 数据集根目录路径
:param dir: 子集名称,传入'train'或'test'
"""
# 创建标签文件,强制指定utf-8编码,解决Windows中文路径乱码
file_txt = open(dir + '.txt', 'w', encoding="utf-8")
# 拼接数据集完整路径
path = os.path.join(root, dir)
# os.walk递归遍历文件夹,返回(当前路径, 子文件夹列表, 文件列表)
for roots, directories, files in os.walk(path):
# 分支1:首次进入train/test目录,获取所有类别名称
if len(directories) != 0:
dirs = directories
# 分支2:进入具体类别文件夹,开始遍历图片写入标签
else:
# 分割路径提取当前类别名称
now_dir = roots.split('\\')
for file in files:
# 拼接图片完整路径
path_1 = os.path.join(roots, file)
print(path_1)
# 写入格式:图片路径 类别下标(下标作为数字标签)
file_txt.write(path_1 + ' ' + str(dirs.index(now_dir[-1])) + '\n')
file_txt.close()
# ==================== 配置参数 ====================
root = r'.\food_dataset' # 数据集根目录
train_dir = 'train' # 训练集文件夹名
test_dir = 'test' # 测试集文件夹名
# ==================== 执行生成 ====================
train_test_file(root, train_dir)
train_test_file(root, test_dir)中文乱码解决方案
file_txt = open(dir + '.txt', 'w', encoding="utf-8")如果你在Windows下不写encoding="utf-8",默认会用系统本地编码(比如GBK),而我们的文件夹名是中文,写入txt时就会变成乱码,后面用Dataset读取路径时直接报错"文件不存在"。
os.walk 双分支设计
if len(directories) != 0:
dirs = directories # 保存所有类别名称
else:
# 进入图片文件夹,写入标签利用 os.walk 先遍历到顶层目录获取全部类别,再进入子目录生成标签,os.walk每次返回三个值:当前目录路径roots、当前目录下的子文件夹列表directories、当前目录下的文件列表files。我们利用它的两层特性:第一次进入train目录时,directories不为空,里面正好是20个类别文件夹的名字,我们把这20个名字存到dirs变量里。然后os.walk会继续往下走,进入每一个类别文件夹,这时directories为空,就走到了else分支,开始逐个处理图片文件。
标签生成原理
dirs.index(now_dir[-1])用类别名称在类别列表中的下标作为数字标签,保证相同类别标签一致。now_dir是通过roots.split('\\')得到的路径碎片列表,最后一项now_dir[-1]就是当前所在的类别文件夹名,比如"汉堡"。dirs是之前保存的所有类别名的列表,顺序就是os.walk遍历到的顺序。用index方法找到"汉堡"在dirs中的位置,这个位置数字就是我们要的数字标签。
运行完脚本后,会在当前目录生成train.txt和test.txt,控制台也会逐行打印所有找到的图片路径,如果你发现txt文件是空的,先检查root路径对不对,再看看train文件夹下面是否确实有类别子文件夹,而不是直接把图片扔在train下面。另外,路径分隔符在Windows下是反斜杠,代码里直接写'\\'或者用os.path.join自动处理都可以。
二、依赖库导入与图片预处理
python
import torch
from torch.utils.data import Dataset, DataLoader # 数据集基类 + 批次加载器
import numpy as np
from PIL import Image # 图片读取库
from torchvision import transforms # 图片预处理工具定义图片预处理
transforms.Compose(...),你可以把它想象成一条流水线,把你想做的所有预处理按顺序写进一个列表里,图片从这头进去,就会依次经过每个操作,从那头出来就是模型能直接接受的张量了。
python
data_transforms = {
# 训练集预处理流水线
'trainda':
transforms.Compose([
transforms.Resize([256, 256]), # 统一缩放为256×256像素
transforms.ToTensor(), # PIL图片 → Tensor张量
]),
# 测试集预处理流水线
'valid':
transforms.Compose([
transforms.Resize([256, 256]),
transforms.ToTensor(),
]),
}transforms.Resize 尺寸统一。原始图片的分辨率五花八门,有的可能很大,有的很小,但神经网络的全连接层要求输入尺寸必须完全一致,所以我们要把所有图片强制缩放到同一个大小。这里选的是 256, 256,也就是宽高各256像素。为什么是256呢?因为像 VGG、ResNet 这些经典 CNN 网络的标准输入尺寸往往是 224×224 或 256×256,256 算是一个兼顾了计算精度和处理速度的选择。当然你也可以改成其他尺寸,只要和网络定义的第一层匹配就行。
**transforms.ToTensor 格式转换,**这一步做了三件大事,而且缺一不可。
第一,数据类型转换:PIL 库读取的图片对象会被转成 PyTorch 的张量(Tensor)。
第二,数值归一化:原始图片每个像素的取值是 0 到 255 的整数,ToTensor 会自动除以 255,把它们变成 0.0 到 1.0 的浮点数。深度学习模型对输入数值范围很敏感,如果输入是 0~255 的大数,梯度更新很容易不稳定。
第三,维度重排。PIL 图片的维度顺序是 (高度, 宽度, 通道),比如一张 256×256 的彩色图片,它的形状是 (256, 256, 3),三个通道(RGB)在最后。但 PyTorch 里的卷积层 nn.Conv2d 要求输入张量的形状是 (通道, 高度, 宽度),也就是把通道数挪到最前面。ToTensor 会帮你自动完成这个重排,输出形状变成 (3, 256, 256)。之所以要通道前置,是因为 PyTorch 的设计惯例是批量维度在第一维,通道维度在第二维,后面才是空间维度。这种做法在底层内存访问上更高效,也方便卷积核跨通道计算。
三、自定义数据集类 food_dataset
在 PyTorch 中,自定义数据集是深度学习项目的核心环节。通过继承官方的 Dataset 基类,我们可以实现灵活、高效的数据读取逻辑。
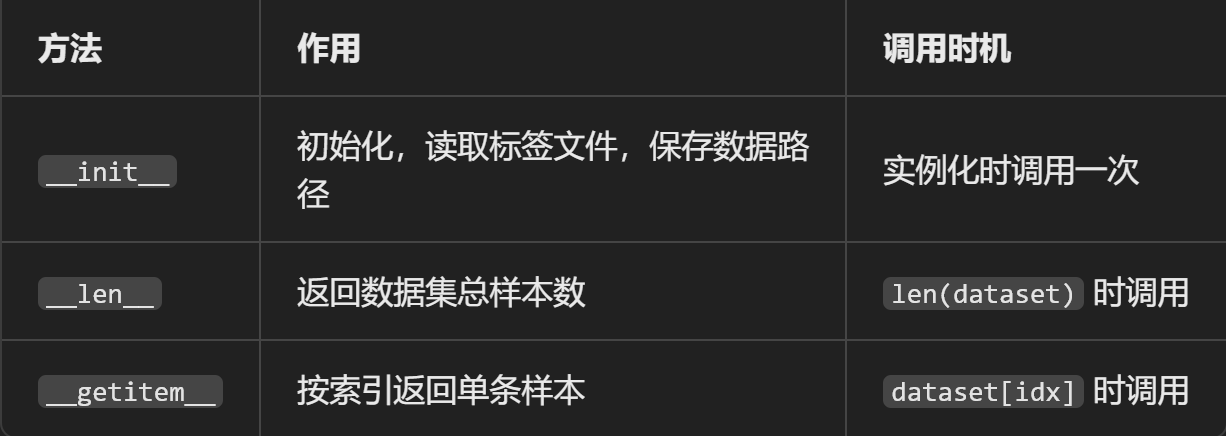
PyTorch 提供的 Dataset 是一个抽象基类,它定义了数据集的标准接口,任何自定义 Dataset 都必须实现以下三个方法:
python
class food_dataset(Dataset):
"""
继承PyTorch官方Dataset基类,实现自定义数据集读取
必须实现3个方法:__init__, __len__, __getitem__
"""
def __init__(self, file_path, transform=None):
"""
初始化:读取标签txt文件,保存所有图片路径和对应标签
"""
self.file_path = file_path # 标签文件路径
self.imgs = [] # 存储所有图片路径
self.labels = [] # 存储所有对应标签
self.transform = transform # 图片预处理流水线
# 读取标签txt文件,每行按空格分割为 [图片路径, 数字标签]
with open(self.file_path, encoding="utf-8") as f:
samples = [x.strip().split(' ') for x in f.readlines()]
for img_path, label in samples:
self.imgs.append(img_path)
self.labels.append(label)
def __len__(self):
"""返回数据集总样本数"""
return len(self.imgs)
def __getitem__(self, idx):
"""按索引返回单条样本:(预处理后的图片张量, 标签张量)"""
# 1. 根据索引读取图片
image = Image.open(self.imgs[idx])
# 2. 如果传入了预处理流水线,执行图片变换
if self.transform:
image = self.transform(image)
# 3. 标签转换:字符串 → int64张量(分类任务标准格式)
label = self.labels[idx]
label = torch.from_numpy(np.array(label, dtype=np.int64))
return image, label实现一个自定义的 Dataset 类。这个类需要定义三个核心方法,分别是初始化方法、长度方法和取样本方法。
init 初始化方法
这里的 file_path 参数传入 train.txt 或 test.txt 的路径,transform 参数则传入上一节定义的预处理流水线。
文件读取的逻辑是这样的。先用 f.readlines () 读取 txt 中的所有行,然后对每一行用 strip () 去掉首尾的换行和空格,再用 split (' ') 按空格分割,最终得到图片路径和标签的列表。
len 长度方法
这个方法最简单,直接返回图片总数即可。当你执行 len (training_data) 时,PyTorch 会自动调用这个方法。
getitem 取样本方法
这是 Dataset 最核心的方法,每次按索引取数据时都会执行。
代码中的第一步是根据索引 idx 取出对应的图片路径,用 Image.open 读取得到 PIL 格式的图片。如果传入了 transform 预处理流水线,就调用它依次完成缩放、转 Tensor 和通道重排。
接着处理标签。从 txt 文件中读出的标签是字符串 "0"、"1" 这样的形式,需要先转换成 numpy 的 int64 数组,再转换成 PyTorch 张量。之所以要用 int64,是因为分类任务中常用的交叉熵损失函数要求标签必须是 long 类型也就是 int64,这是标准的输入格式。
init 方法中只保存图片路径,并不读取图片,直到 getitem 被调用时才真正将图片读入内存。这样一来,即使数据集有几万张图片,内存占用也会非常小。
四、DataLoader 数据加载与 CNN 网络搭建
实例化数据集与 DataLoader
python
# 实例化训练集、测试集
training_data = food_dataset(file_path='./train.txt', transform=data_transforms['trainda'])
test_data = food_dataset(file_path='./test.txt', transform=data_transforms['valid'])
# DataLoader:打包成批次,支持分批、打乱、多线程加载
train_dataloader = DataLoader(training_data, batch_size=64, shuffle=True)
test_dataloader = DataLoader(test_data, batch_size=64, shuffle=True)首先实例化训练集和测试集,分别传入对应的标签文件路径和预处理流水线。
然后通过 DataLoader 将数据集打包成批次。batch_size=64 表示每次训练一次性送入 64 张图片。shuffle=True 表示训练集打乱顺序,防止模型记住图片排列顺序。
这里需要注意测试集通常设置 shuffle=False,保证每次评估顺序固定,准确率结果稳定。
自动选择训练设备
python
device = "cuda" if torch.cuda.is_available() else "mps" if torch.backends.mps.is_available() else "cpu"
print(f"Using {device} device")这段代码会自动判断当前硬件环境,优先使用 NVIDIA 显卡的 cuda 加速,其次是苹果 M 系列芯片的 mps 加速,最后兜底使用 CPU。后续所有数据和模型都会迁移到这个设备上运算。
搭建 CNN 卷积神经网络
python
from torch import nn
class CNN(nn.Module):
"""自定义CNN卷积神经网络,20分类"""
def __init__(self):
super(CNN, self).__init__()
# 第1组卷积块:卷积+激活+池化
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=16, kernel_size=5, stride=1, padding=2),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2)
)
# 第2组卷积块:两次卷积+激活+池化
self.conv2 = nn.Sequential(
nn.Conv2d(in_channels=16, out_channels=32, kernel_size=5, stride=1, padding=2),
nn.ReLU(),
nn.Conv2d(in_channels=32, out_channels=32, kernel_size=5, stride=1, padding=2),
nn.ReLU(),
nn.MaxPool2d(2),
)
# 第3组卷积块:仅卷积+激活
self.conv3 = nn.Sequential(
nn.Conv2d(in_channels=32, out_channels=128, kernel_size=5, stride=1, padding=2),
nn.ReLU(),
)
# 全连接输出层:映射到20个分类
self.out = nn.Linear(128 * 64 * 64, out_features=20)
def forward(self, x):
"""前向传播:数据流过网络的计算流程"""
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
x = x.view(x.size(0), -1)
output = self.out(x)
return output
# 实例化模型并迁移到指定设备
model = CNN().to(device)
print(model)网络结构采用三组卷积块逐步提取图像特征。
第一组卷积将 3 通道 RGB 图映射为 16 张特征图,池化后尺寸从 256 缩小到 128。第二组两次卷积通道数提升到 32,再次池化尺寸缩小到 64。第三组卷积继续升维到 128 通道,保持尺寸不变。
最后通过 view 将四维特征图展平,送入全连接层输出 20 个类别的预测分数。padding=2 保证卷积后尺寸不变,这是卷积网络的常用技巧。
五、模型训练与测试完整流程
单轮训练函数
python
def trainda(dataloader, model, loss_fn, optimizer):
"""
功能:执行单轮完整训练
流程:前向传播 → 计算损失 → 反向传播 → 更新权重
"""
model.train()
batch_size_num = 1
for X, y in dataloader:
# 数据迁移到GPU/CPU
X, y = X.to(device), y.to(device)
# 前向传播得到预测结果
pred = model.forward(X)
# 计算预测与真实标签的损失
loss = loss_fn(pred, y)
# 反向传播更新权重标准三步
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 打印训练进度
loss = loss.item()
if batch_size_num % 1 == 0:
print(f"loss: {loss:>7f} [number:{batch_size_num}]")
batch_size_num += 1训练函数是深度学习的核心。首先调用 model.train () 切换到训练模式。然后循环读取每个批次的数据,将数据和标签迁移到加速设备。
前向传播得到预测结果,计算预测与真实标签的损失。反向传播有标准的三步:先清空上一轮梯度缓存,再反向传播计算梯度,最后优化器根据梯度更新权重。这三步顺序不能错。
测试集评估函数
python
def testda(dataloader, model, loss_fn):
"""
功能:在测试集上评估模型准确率和平均损失
"""
size = len(dataloader.dataset)
num_batches = len(dataloader)
model.eval()
test_loss, correct = 0, 0
with torch.no_grad():
for X, y in dataloader:
X, y = X.to(device), y.to(device)
pred = model.forward(X)
test_loss += loss_fn(pred, y).item()
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
print(f"Test result: \n Accuracy: {(100 * correct)}%, Avg loss: {test_loss}")测试函数首先调用 model.eval () 切换到评估模式,关闭 Dropout 等训练时的随机行为。
最重要的是 torch.no_grad (),测试不需要更新权重,关闭梯度计算可以大幅节省显存并提升推理速度。pred.argmax (1) 取每行最大值的下标作为预测类别,与真实标签对比统计正确数量。
定义损失函数与优化器
python
loss_fn = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)多分类任务标准使用 CrossEntropyLoss 交叉熵损失,内部自动完成 softmax 归一化。优化器选择 Adam,自带自适应学习率,收敛速度快,是图像分类的首选。
完整训练循环
python
epochs = 10
for t in range(epochs):
print(f"Epoch {t + 1}\n--------------------------------")
trainda(train_dataloader, model, loss_fn, optimizer)
testda(test_dataloader, model, loss_fn)
print("Done!")
testda(test_dataloader, model, loss_fn)一个 epoch 代表把整个训练集完整遍历一遍。这里设置训练 10 轮,每轮训练完成后立即在测试集上评估,这样可以实时观察模型是否过拟合。全部训练结束后再执行一次最终评估。