👑主页:吾名招财
👓简介:工科学硕,研究方向机器视觉,爱好较广泛...
💫签名:面朝大海,春暖花开!
开源可SLAM的3D扫描仪硬件方案(成本低至6000元)
引言
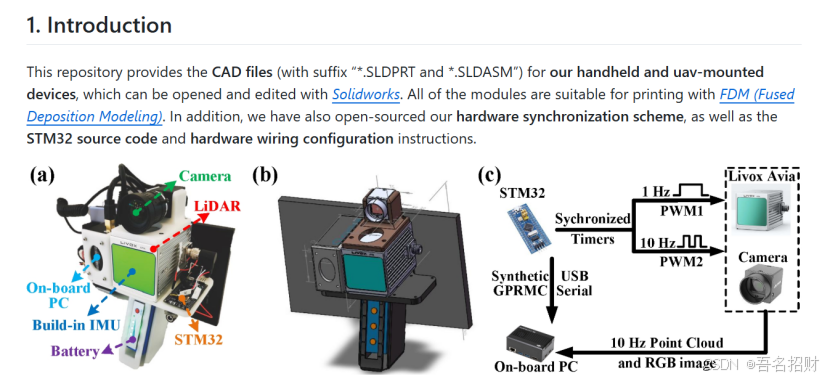
经过一段时间的调研,要想达到实时且精确的slam重建,硬件设备和软件算法必须相辅相成,缺一不可,使用TOF等深度相机智能采集RGB、depth的数据,这种数据对一个局部小面且特征丰富的物体来说还行,一旦将其向外扩展,扩展到大范围的场景时其全局定位和位姿估计就不行了,也就是说我们还得有个相对专业的硬件设备,就是扫描仪,它能够给我们提供图像、雷达点云、IMU加速度角速度数据,只有这三类数据的融合我们才能非常快的且精确的进行slam。
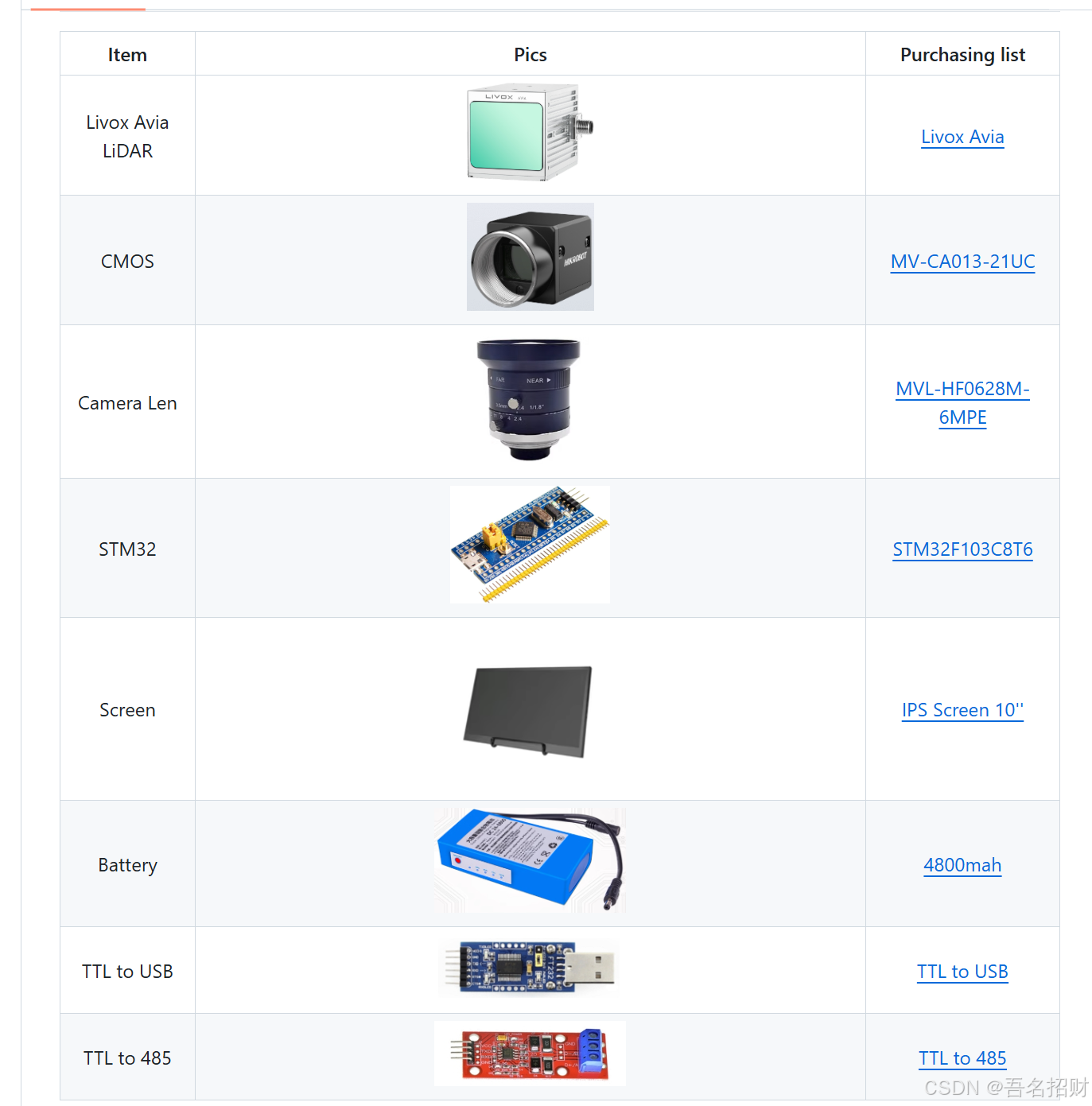
网上也有一些商业化的扫描仪,但价格太贵了,其实其核心组成就是视觉、雷达、IMU这个三个主要结构,完全可以自己集成组装一个扫描仪用来采集这三类数据做融合测试
目前网上有个比较成熟的基于激光雷达惯性视觉融合方案FAST-LIVO2,这里面提供了开源硬件组装方案及对应的适配算法,当然也有一些高手将部分硬件进行替换极大的降低了成本(总计算约6000元左右),也有很多复现成功的案例,效果相当不错。
硬件方案1(简化版总成本极低)
https://github.com/hku-mars/LIV_handhold_2/tree/main?tab=readme-ov-file#running-fast-livo2
https://github.com/hku-mars/LIV_handhold_2/tree/main?tab=readme-ov-file(重要必看,里面包含适配mid360的相关配置文件及对应硬件)
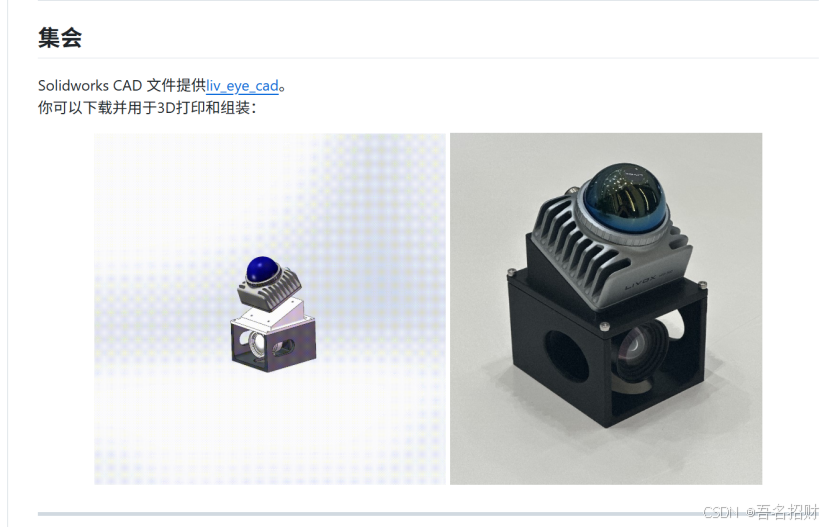
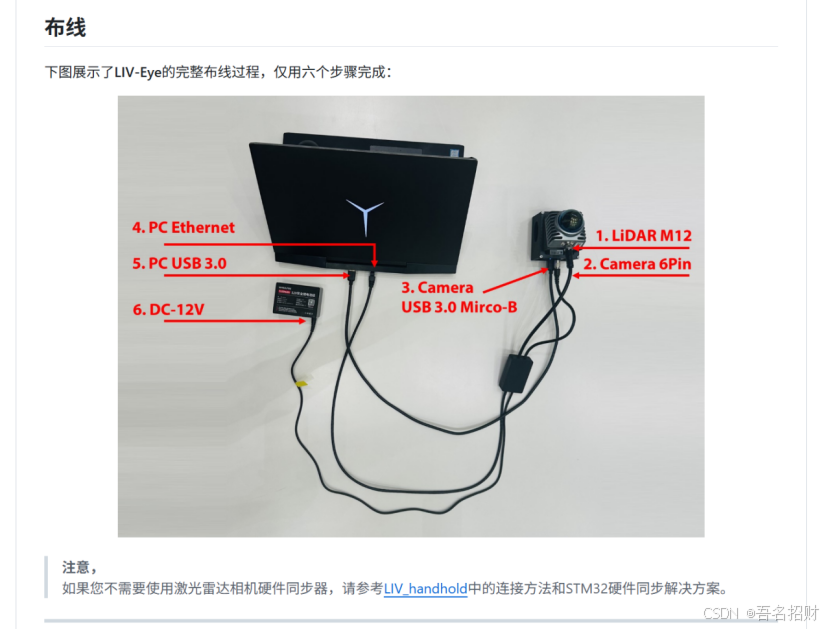
LIV-EYE:一款低成本激光雷达惯性视觉融合3D传感器,用于机器人和具身人工智能 中文
硬件方案2(原FAST-LIVO2硬件方案成本稍高)
https://github.com/xuankuzcr/LIV_handhold