本文探讨全栈并网智驾大模型(VLA/端到端)在行泊一体领航辅助(NOA/NGP)中的应用,重点解决端到端大模型在高维不可预测环境中的功能安全收敛问题。通过构建全场景ODD(设计运行域)运营库,实现行车与泊车功能的无缝切换,并利用时空对齐、传感器动态确权等技术确保安全性和可靠性。文章还分析了系统响应时间窗的优化及物理极限下的安全控制策略,包括动态掩码技术和VMC层的越权限制机制,以应对极端工况和保障系统稳定性。
第1章:全栈并网智驾大模型(VLA/端到端)的场景矩阵与物理极限
1.1 行泊一体领航辅助(NOA/NGP)的设计运行域(ODD)参数库构建
1.1.1 领航辅助(NOA/NGP)行泊一体的架构级切换与时空对齐机制
传统的自动驾驶架构中,行车与泊车功能采用独立的软件栈与单芯片(SoC)算力切片进行物理隔离。在视觉-语言-动作大模型(VLA/端到端)架构下,系统通过复用全量感知底座(Perception Backbone)实现多功能并网。
-
时空特征网络动态切换
在行车状态下,系统运行基于 Transformer 空间交叉注意力机制的高速特征网络。当车辆切入泊车工况(车速v < 15km/h)时,感知层切换为针对超近距离、高密度桩标及地库环境的高分辨率占用网络(Occupancy Network)。
-
时空确定性约束指标
系统依赖底软中间件的 gPTP(IEEE 802.1AS)微秒级统一时间戳协议。在行车与泊车功能状态切换的暂态(Transient State)阶段,确保4D成像雷达点云与高清视觉数据流的时空公差趋于零,消除由于异步采样导致的系统状态不确定性。
1.1.2 全场景设计运行域(ODD)参数库的正向设计
为满足预期功能安全(SOTIF)的闭环要求,系统必须在早期设计阶段正向穷尽 ODD 参数矩阵。全场景 ODD 参数库包含以下三个刚性维度:
A. 静态环境要素矩阵(Static Environment Layer)
-
物理拓扑要素:包括高速干线(大曲率弯道、多层匝道汇入、收费站分流拓扑)、城市复杂路口(无保护左转、非标准十字路口)、空间受限地库(环形地下坡道、双层机械车位、极窄断头路车位)。
-
微波与光学反射特征:地库内大面积环氧树脂地面的镜面多径反射特征、干线物流路侧高密度金属护栏(Guardrail)造成的雷达波自激信号与多径鬼影(Ghost Tracks)。
B. 动态交通参与者矩阵(Dynamic Traffic Layer)
-
异形障碍物(General Obstacles):重卡多节拖挂车(Tractor-Trailer)、非刚体异形散落物(如掉落货箱、轮胎皮)、低速横穿的非机动车与行人。
-
行为意图矩阵:前车紧急切入(Cut-in)、相邻大车并线压线、地库拐角盲区物体的突发运动。
C. 环境与气象边界矩阵(Environmental Condition Layer)
-
气象极端工况:大雨、暴雪、浓雾等导致激光雷达衰减系数增大和视觉对比度降低的物理极限工况。
-
光照极端工况:出入隧道口瞬间的明暗突变(视觉传感器白盲与黑盲效应)、夜间无照明干线、逆光工况。
1.1.3 基于场景矩阵的传感器 SOR 指标反向定义(Backward-Defining)
行泊一体功能的功能级无缝切换,依赖于业务层向前端传感器(毫米波雷达/视觉)定义的置信度边界指标。
-
场景级动态确权流程
针对 ODD 库中的特定场景(例如:大雨工况下 150\\text{m} 外的静止金属挂车),行车、泊车与主动安全(AEB)模块联合制定雷达点云的最低信噪比(SNR)与存在概率(P_exist)门槛值。
-
"带条件接受(Conditional Acceptance)"的控制策略
在实车极端工况回归测试中,若雷达在特定 ODD 边缘(如强反射地库桩标)的输出不满足供应合同(SOR)的刚性指标,系统将启动动态掩码技术(Dynamic Masking)进行安全重构:
-
在雷达数据报文中注入该场景的 SOTIF 风险标签(Risk Tag)。
-
后端融合算法动态将该雷达目标的权重(Confidence Weight)从 0.9 降级至 0.2,转而信任视觉或激光雷达的冗余数据。
-
若无法实现数据平账,系统将在中间件或底软层面触发功能刚性降级,向驾驶员发出接管指令(TOR),或由车辆运动控制(VMC)层控制车辆安全靠边停车。
-
1.1.4 物理极限下的系统容错功能满足时间(FTTI)消缺
全场景 ODD 库的安全底线是严格控制从智驾端推理到底盘执行器执行的端到端全生命周期时延账本,其数学满足公式如下:
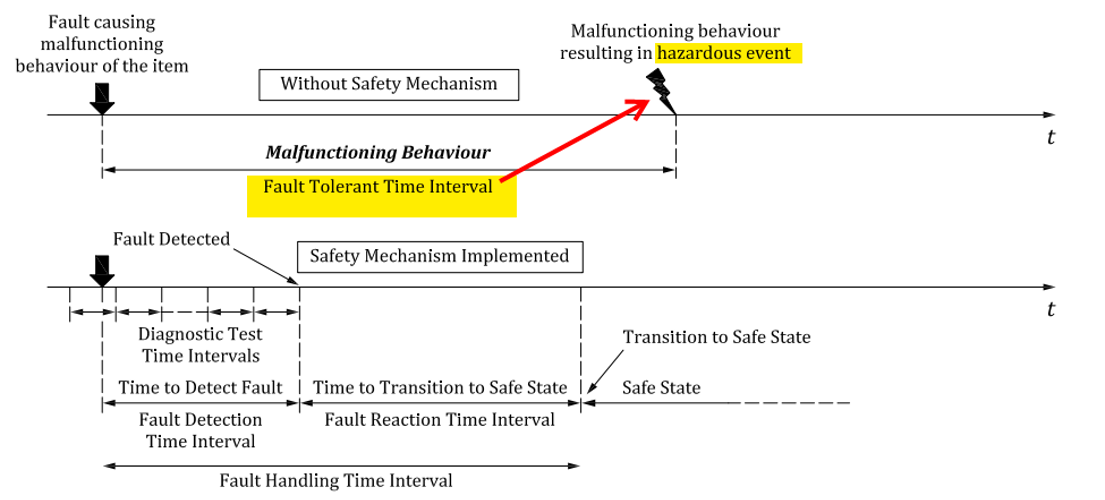
全场景 ODD 库的安全底线是严格控制从智驾端推理到底盘执行器执行的端到端全生命周期时延账本,其数学满足公式如下:
T_total = T_sensor + T_inference + T_middleware + T_vmc + T_actuator≤FTTI (50ms~100ms)
-
大模型推理时延抖动(Jitter)的消除方法
针对端到端大模型在 NPU 内推理时间的非确定性抖动,系统利用中间件共享内存的零拷贝(Zero-Copy)技术消除进程间的数据复制延迟。同时,在 VMC 端部署时空外推插值算法,当大模型推理延迟发生突变时,底盘控制算法利用一阶泰勒展开进行毫秒级控制量补偿,确保执行器控制流的连续性。
-
车辆动力学边界的越权限制机制(Override)
VMC 端实时运行基于轮胎抓地力估计(\\mu 估计)的动力学模型。一旦大模型输出的期望控制量(如目标减速度、转向角)超越当前轮胎附着力的物理极限,基于传统车规安全规则的 VMC 控制层拥有最高控制主权,对输入指令进行自适应削波限幅(Clipping),防止商用车发生锁死侧滑、侧翻或挂车折头(Jackknifing)等动力学失稳现象。