Abaqus/Standard
修改接触收敛准则带来的性能提升
现在通过指定收敛检查准则,Abaqus/Standard 会自动修改与接触相关的收敛检查,这可能会减少求解时间。替代收敛检查在较早版本中已被引入。然而,在早期版本中它们不会影响接触特定的收敛阈值。现在可以在 *CONTROLS 选项中将 CONVERGENCE CHECK 参数设置为 MODERATE、RELAXED 或 CONCEPT DESIGN ,接触收敛也会受到影响。
下表列出了由于修改了接触收敛检查,不同接触模型中的总迭代次数所产生的影响。表中的每一行对应一种不同的收敛检查设置。
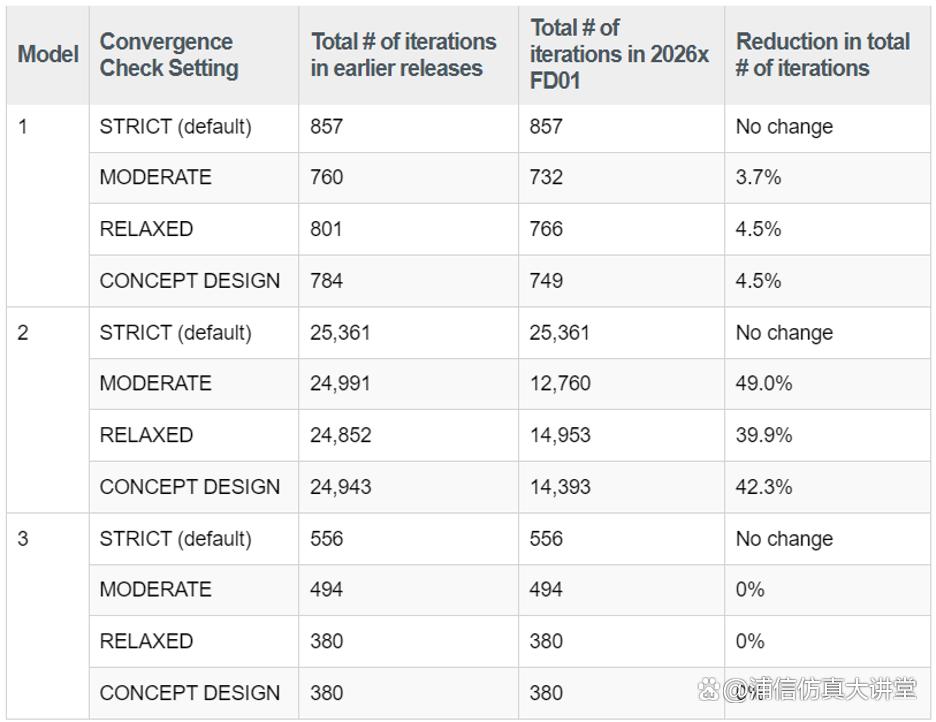
在默认 STRICT 设置生效的情况下,各版本之间的收敛容差没有变化;因此,对所有使用该设置的模型而言,总迭代次数保持不变。采用 MODERATE、RELAXED 和 CONCEPT DESIGN 设置的模型,其影响如下:
模型 1 的迭代次数有小幅比例下降,其中 DESIGN 设置所需迭代次数最少。
模型 2 的迭代次数有较大比例下降,其中 MODERATE 设置所需迭代次数最少。这表明进一步放宽收敛阈值并不总是会带来收敛性的提升,这一点在直觉上可能有些反常。在某些情况下,你可能会观察到 STRICT 设置比其他设置具有更好的收敛表现。
模型 3 的迭代次数没有变化,这表明接触相关的收敛检查并不控制该模型的收敛过程。
在精度方面,对模型 2(与早期版本相比受影响最大)进行了检验。在每一种替代收敛检查设置下,这些更改都没有导致峰值 Mises 应力或峰值接触应力出现差异。对于该模型,在早期版本和本版本中,不同设置下的峰值接触应力彼此相差在 3% 以内,峰值 Mises 应力彼此相差在 0.1% 以内。总体而言,你需要自行确认这些替代检查得到的解在单独使用时,或与默认 STRICT 设置相比时,其结果精度是可接受的。
Abaqus/Standard
接触计算性能提升
针对多接触场景模型,Abaqus 2026 FD01 版本相比旧版本实现显著提速。测试环境:8 CPU,涵盖管道夹具、定子、盘式制动器、联轴器、转子衬套插入等典型接触模型。
对比版本 提速范围
2026 FD01 vs 2024 GA 12% - 30%
2026 FD01 vs 2021 GA 25% - 50%
全局绑定(Global Bonding)
功能增强
全局绑定仍是接触开发的关注领域,此次更新支持更多种结构连接形式:
壳边缘 - 壳边缘绑定
壳边缘 - 壳内部绑定
梁端部 - 梁端部绑定
梁 - 实体绑定
壳边缘 - 实体绑定
Abaqus/Standard 中
圆形截面梁的接触表面表示
现在可以将 Abaqus/Standard 配置为在内部生成用于通用接触计算的表面单元,以表示梁和管道的圆形截面。
优势:可以更准确地对梁端部进行建模,并在接触表面上获得更详细的接触输出结果。
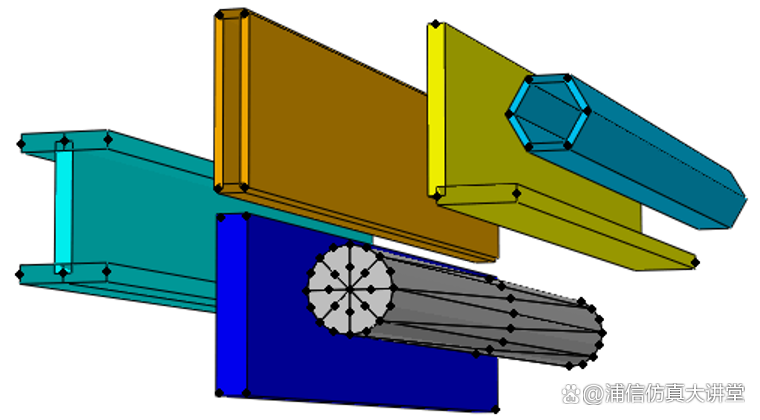
在早期版本中,Abaqus/Standard 默认会在非圆形梁截面的外部附近自动生成接触面、节点和边的网格。现在,可以将 Abaqus/Standard 配置为在内部生成用于通用接触计算的表面单元,以表示梁和管道的圆形截面。下图展示了基于由 Abaqus/Standard 为通用接触在内部生成的表面单元网格,不同截面梁的接触表面表示方式。
使用通用子模型接口的
壳到壳、壳到实体、梁到梁与实体到实体子模型分析
除早期版本已支持的梁到实体和梁到壳子模型分析外,通用子模型接口现在还支持壳到壳、壳到实体、梁到梁和实体到实体的子模型分析,并且包含温度、孔压和声压自由度。
优势:现在在整体模型与子模型分析之间,可以在更广泛的单元类型组合下执行子模型分析。
Abaqus/Explicit 中
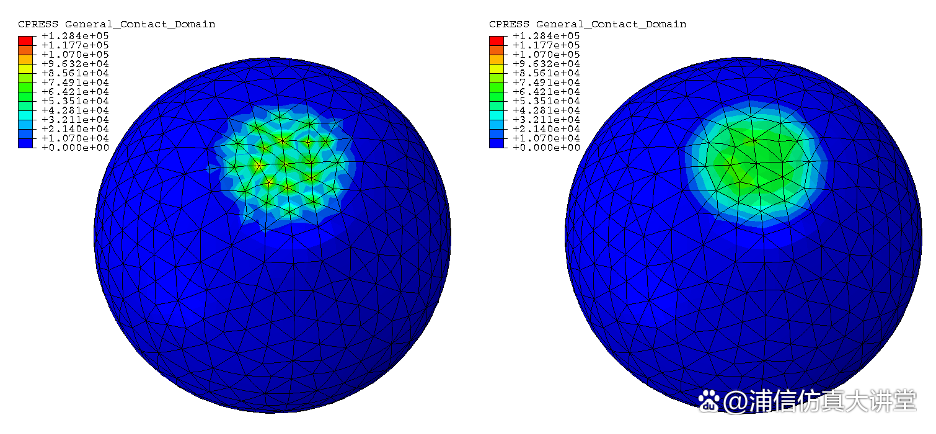
C3D10 单元的接触应力增强
在 Abaqus/Explicit 中,现在在后处理过程中会对二阶四面体单元(C3D10)的接触应力进行平滑处理。
优势:接触应力的表现更加连续、视觉上更加一致,并且与 Abaqus/Standard 中的可视化结果保持一致。
接触应力分布在许多应用中都是关键因素,包括载荷传递、磨损、材料失效以及机械分析中的界面行为。
下面的示例展示了一个球体被压缩在两个解析刚性表面之间(未显示)。接触分布清楚地展示了新的滤波输出所带来的优势。