这份 IMU_Processing.hpp 是 FAST-LIO 前端里最关键的模块之一。它不负责 ikd-Tree 最近邻搜索,也不直接构造点到平面残差;它负责在 LiDAR 匹配前完成两件基础工作:
1.利用高频 IMU,把上一帧结束后的状态传播到当前 LiDAR 扫描结束时刻。
2.利用扫描期间的 IMU 运动轨迹,把一帧中不同时间采到的 LiDAR 点,
统一补偿到"扫描结束时刻"的 LiDAR 坐标系。也就是:
sync_packages()
↓
得到当前 LiDAR 帧 + 对应 IMU 数据
↓
ImuProcess::Process()
↓
IMU 初始化 或 IMU 前向传播
↓
UndistortPcl()
↓
去畸变点云 feats_undistort
↓
laserMapping.cpp
↓
ikd-Tree 匹配 + IESKF LiDAR 修正你给的博客把 laserMapping.cpp 主链路拆成"同步 → IMU 传播与去畸变 → LiDAR 匹配 → IESKF → 地图更新";这个 IMU_Processing.hpp 正好就是其中第二段的完整实现。
1.ImuProcess 类整体职责
类定义中的核心接口是:
void Process(
const MeasureGroup &meas,
esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state,
PointCloudXYZI::Ptr pcl_un_);三个输入分别是:
meas
:sync_packages() 打好的当前数据包。
里面至少包含当前 LiDAR、LiDAR 起止时间、当前帧需要的 IMU。
kf_state
:FAST-LIO 的 IESKF 状态。
进入本函数时,它保存的是上一帧 LiDAR 优化后的状态;
离开本函数时,它变成当前扫描结束时刻的 IMU 预测状态。
pcl_un_
:输出去畸变点云。
后续 laserMapping.cpp 会将它作为 feats_undistort 使用。Process() 的工作流很简单:
当前帧 MeasureGroup
↓
没有 IMU?
↓ 是
直接 return
仍处于初始化阶段?
↓ 是
IMU_init()
初始化重力、gyro bias、协方差
↓
return
初始化完成?
↓ 是
UndistortPcl()
IMU 前向传播 + 逐点去畸变对应源码主逻辑:
if(meas.imu.empty()) {return;};
if (imu_need_init_)
{
IMU_init(meas, kf_state, init_iter_num);
if (init_iter_num > MAX_INI_COUNT)
{
imu_need_init_ = false;
}
return;
}
UndistortPcl(meas, kf_state, *cur_pcl_un_);这意味着原版这条流程没有"没有 IMU 就自动使用纯 LiDAR 去畸变"的备用逻辑。没有 IMU 时,它不会做本帧预测,也不会做逐点去畸变。
2.输入 MeasureGroup 到底包含什么
虽然 MeasureGroup 定义在其他文件中,但从本文件使用方式可以确定,它至少包含:
meas.lidar
:当前帧经过 preprocess.cpp 处理后的 LiDAR 点云。
meas.imu
:当前 LiDAR 扫描相关的 IMU 队列。
meas.lidar_beg_time
:当前 LiDAR 扫描开始时刻。
meas.lidar_end_time
:当前 LiDAR 扫描结束时刻。其时间关系是:
LiDAR 当前帧:
t_begin -------------------------------- t_end
IMU:
u0 --- u1 --- u2 --- ... --- un
要求:
最后到达的 IMU 时间已经覆盖 t_end,
但当前打包进 meas.imu 的最后一条 IMU 时间通常不超过 t_end。所以在 UndistortPcl() 中,最后一条实际取出的 IMU 很可能略早于扫描结束时间。随后代码会使用这最后一段 IMU 的运动模型,把状态短时间传播到精确的 t_end。
最后一条取出的 IMU:
t_imu_last ≤ t_end
随后:
kf_state.predict(t_end - t_imu_last, Q, in)
得到:
扫描结束时刻的预测状态。这就是你前面问的"最后取出的 IMU 时间仍然比 end 小,后面怎么办"的代码实现位置。
3.三个核心坐标系与外参
整个 IMU_Processing.hpp 只要把三个坐标系理清,后面去畸变公式就不乱。
L:LiDAR 坐标系
I:IMU 坐标系 / 车体坐标系
G:世界坐标系
FAST-LIO 中通常叫 camera_init代码中的外参变量:
M3D Lidar_R_wrt_IMU;
V3D Lidar_T_wrt_IMU;含义是:
^I R_L
:LiDAR 坐标系旋转到 IMU 坐标系的旋转外参。
^I t_L
:LiDAR 原点在 IMU 坐标系中的位置。对应关系:
LiDAR 点在采样时刻 ti:
^L_ti p_i
LiDAR → IMU:
^I p_i =
^I R_L · ^L_ti p_i
+
^I t_L
变量:
^L_ti p_i
:第 i 个原始 LiDAR 点;
坐标表达在该点真正采样时刻的 LiDAR 坐标系。
^I R_L
:LiDAR 到 IMU 的旋转外参。
^I t_L
:LiDAR 原点相对 IMU 原点的平移外参。
^I p_i
:同一个点在 IMU 坐标系中的表示。为什么平移外参也必须处理?因为 LiDAR 与 IMU 通常并不重合。比如 LiDAR 在 IMU 前方 20 cm,车辆原地旋转时,LiDAR 原点会绕 IMU 原点做圆周运动;若忽略这一段杆臂,近距离墙面和货架边缘会出现明显偏移。
4.FAST-LIO 在 IMU 中传播的状态
本文件使用:
esekfom::esekf<state_ikfom, 12, input_ikfom> kf_state;这里的 12 不是状态维度,而是过程噪声维度。根据代码中状态字段与协方差索引,完整状态可理解为:
x =
[
^G p_I,
^G R_I,
^I R_L,
^I t_L,
^G v_I,
b_g,
b_a,
^G g
]
变量:
^G p_I
:IMU 在世界坐标系中的位置,3 维。
^G R_I
:IMU 到世界坐标系的姿态,局部误差 3 维。
^I R_L
:LiDAR 到 IMU 的旋转外参,3 维。
^I t_L
:LiDAR 原点在 IMU 系中的位置,3 维。
^G v_I
:IMU 在世界系中的速度,3 维。
b_g
:陀螺仪零偏,3 维。
b_a
:加速度计零偏,3 维。
^G g
:世界系重力方向。
重力大小固定,所以本质只有 2 个自由度。总自由度是:
3 + 3 + 3 + 3 + 3 + 3 + 3 + 2 = 23过程噪声是 12 维:
w =
[
n_g,
n_a,
n_bg,
n_ba
]
变量:
n_g
:陀螺仪白噪声,3 维。
n_a
:加速度计白噪声,3 维。
n_bg
:陀螺仪零偏随机游走,3 维。
n_ba
:加速度计零偏随机游走,3 维。本文件中的 Q 就是这 12 维过程噪声协方差。
5.构造函数:默认配置了什么
构造函数如下:
ImuProcess::ImuProcess()
: b_first_frame_(true), imu_need_init_(true),
start_timestamp_(-1)
{
init_iter_num = 1;
Q = process_noise_cov();
cov_acc = V3D(0.1, 0.1, 0.1);
cov_gyr = V3D(0.1, 0.1, 0.1);
cov_bias_gyr = V3D(0.0001, 0.0001, 0.0001);
cov_bias_acc = V3D(0.0001, 0.0001, 0.0001);
mean_acc = V3D(0, 0, -1.0);
mean_gyr = V3D(0, 0, 0);
angvel_last = Zero3d;
Lidar_T_wrt_IMU = Zero3d;
Lidar_R_wrt_IMU = Eye3d;
last_imu_.reset(new sensor_msgs::Imu());
}含义是:
imu_need_init_ = true
:系统刚启动时,先进行 IMU 初始化。
mean_acc = (0, 0, -1)
:加速度均值初值。
后续会被真实 IMU 数据覆盖。
mean_gyr = (0, 0, 0)
:陀螺仪均值初值。
Lidar_T_wrt_IMU = 0
Lidar_R_wrt_IMU = I
:默认假设 LiDAR 与 IMU 重合、轴方向一致。
实际运行前必须通过 set_extrinsic() 写入真实外参。外参有三种设置方式:
set_extrinsic(transl, rot);
set_extrinsic(transl);
set_extrinsic(T_4x4);
第一种:
直接传平移 + 旋转。
第二种:
只传平移,默认旋转为单位阵。
第三种:
从 4×4 齐次变换矩阵中取旋转和平移。这些设置不会立刻改变滤波器状态;真正写入 state_ikfom 的位置在初始化阶段:
init_state.offset_T_L_I = Lidar_T_wrt_IMU;
init_state.offset_R_L_I = Lidar_R_wrt_IMU;6.IMU_init():启动时到底初始化什么
初始化函数的目标,源码注释已经写得很明确:
/** 1. initializing the gravity, gyro bias,
** acc and gyro covariance
** 2. normalize the acceleration measurements
** to unit gravity **/它做四类事情:
1.统计平均加速度。
2.统计平均角速度。
3.根据平均加速度初始化重力方向。
4.根据平均角速度初始化陀螺仪零偏。初始化阶段隐含前提是:
机器人启动后应静止,至少不能有明显持续加速、持续旋转或强烈震动。
否则平均加速度里会混进真实线加速度,平均角速度里会混进真实转动,导致重力与陀螺仪偏置初值不可靠。
6.1 第一帧初始化
第一次进入 IMU_init() 时:
if (b_first_frame_)
{
Reset();
N = 1;
b_first_frame_ = false;
const auto &imu_acc =
meas.imu.front()->linear_acceleration;
const auto &gyr_acc =
meas.imu.front()->angular_velocity;
mean_acc << imu_acc.x, imu_acc.y, imu_acc.z;
mean_gyr << gyr_acc.x, gyr_acc.y, gyr_acc.z;
first_lidar_time = meas.lidar_beg_time;
}这里的作用是:
第一条 IMU:
作为均值统计的起点。
first_lidar_time:
记录第一帧 LiDAR 时间。
主要用于调试或输出日志。之后遍历当前 meas.imu 中所有 IMU:
for (const auto &imu : meas.imu)
{
...
}6.2 平均加速度、平均角速度怎么更新
代码使用在线均值:
mean_acc += (cur_acc - mean_acc) / N;
mean_gyr += (cur_gyr - mean_gyr) / N;数学形式:
μ_N =
μ_(N-1)
+
(x_N - μ_(N-1)) / N
变量:
μ_(N-1)
:前 N-1 个 IMU 样本的均值。
x_N
:当前新增 IMU 样本。
μ_N
:更新后的均值。对于本代码:
mean_acc
:启动阶段加速度计平均测量。
mean_gyr
:启动阶段陀螺仪平均测量。这样不需要保存全部历史 IMU 数据,也可以不断更新均值。
6.3 初始化重力方向
初始化结束前,代码写入:
init_state.grav =
S2(- mean_acc / mean_acc.norm() * G_m_s2);可理解为:
^G g_init =
- mean_acc / ||mean_acc|| · g
变量:
mean_acc
:静止初始化期间的平均加速度计读数。
||mean_acc||
:其模长。
G_m_s2
:标准重力大小,通常约 9.81 m/s²。
负号
:因为静止时加速度计测到的是与重力方向相反的比力。举例:假设 IMU 静止时测得:
mean_acc ≈ (0, 0, 9.81)则代码会把重力设为:
grav ≈ (0, 0, -9.81)这意味着世界坐标系中重力向下。
这里初始化的是重力方向,不是完整的绝对姿态。尤其 yaw 方向不能仅由加速度计确定;重力只能约束俯仰和横滚,无法决定朝向角。
6.4 初始化陀螺仪零偏
代码:
init_state.bg = mean_gyr;即:
b_g_init = mean_gyr理由是静止时:
ω_m = ω_true + b_g + n_g
静止时:
ω_true ≈ 0
因此:
mean_gyr ≈ b_g如果初始化期间小车正在转弯或人工转动雷达,真实角速度会被误认为陀螺仪 bias。结果是后续姿态积分刚开始就会偏,LiDAR 匹配可能要花多帧才能把这个错误修回来。
6.5 初始化协方差 P
代码把初始协方差设为单位阵,再对部分状态赋较小方差:
init_P.setIdentity();
init_P(6,6) = init_P(7,7) = init_P(8,8) = 0.00001;
init_P(9,9) = init_P(10,10) = init_P(11,11) = 0.00001;
init_P(15,15) = init_P(16,16) = init_P(17,17) = 0.0001;
init_P(18,18) = init_P(19,19) = init_P(20,20) = 0.001;
init_P(21,21) = init_P(22,22) = 0.00001;按代码索引可理解为:
0 ~ 2
:位置误差。
3 ~ 5
:姿态误差。
6 ~ 8
:旋转外参误差。
9 ~ 11
:平移外参误差。
12 ~ 14
:速度误差。
15 ~ 17
:陀螺仪 bias 误差。
18 ~ 20
:加速度计 bias 误差。
21 ~ 22
:重力方向误差。这表达的是:
位置、姿态、速度:
初始不确定性相对较大。
外参:
更相信配置值。
gyro bias:
静止均值估计后,相对有一定信心。
acc bias:
也有初始约束,但不如 gyro bias 紧。
重力方向:
经过均值加速度确定后,初始不确定性较小。不过协方差不是"越小越好"。若初始 P 设置得过小,滤波器会过度相信错误初值,后续 LiDAR 很难把状态拉回来。
6.6 初始化结束条件
代码:
#define MAX_INI_COUNT (10)
if (init_iter_num > MAX_INI_COUNT)
{
imu_need_init_ = false;
}这里的 10 指的是累计用于初始化统计的 IMU 样本数量,不是 10 帧 LiDAR。
例如:
IMU:200 Hz
LiDAR:10 Hz
一帧 LiDAR 大约持续:
100 ms
该帧内 IMU 数量大约:
20 条这种情况下,初始化可能只经过一帧或很少几帧就结束。
因此这套初始化更像"快速起步初始化",不是严格长时间静止标定。实车启动时最好给系统留一段静止时间。
7.初始化结束时噪声的实际处理
初始化结束时,源码先执行:
cov_acc *= pow(
G_m_s2 / mean_acc.norm(),
2
);看起来是在根据平均重力模长调整加速度计噪声。
但紧接着又执行:
cov_acc = cov_acc_scale;
cov_gyr = cov_gyr_scale;所以最终运行时真正使用的 cov_acc、cov_gyr 主要来自外部配置调用:
set_acc_cov(...)
set_gyr_cov(...)因此要注意:
启动统计得到的 cov_acc、cov_gyr
并不是最终一定会被使用。
最终是否采用它们,
取决于后续是否被 cov_acc_scale、
cov_gyr_scale 覆盖。当前构造函数中并没有显式给:
cov_acc_scale
cov_gyr_scale赋默认值。因此正常运行依赖外部初始化代码调用:
p_imu->set_acc_cov(...)
p_imu->set_gyr_cov(...)若外部没有正确配置,初始化结束时将未明确初始化的 scale 值写回 cov_acc、cov_gyr 会有风险。这是从当前文件可直接看到的配置依赖点。
8.UndistortPcl():完整去畸变流程
初始化完成后,Process() 调用:
UndistortPcl(meas, kf_state, *cur_pcl_un_);它不是一上来就逐点变换,而是分成三大阶段:
阶段 A:
建立扫描期间的 IMU 连续轨迹。
阶段 B:
将状态传播到 LiDAR 精确结束时刻。
阶段 C:
对每一个 LiDAR 点,
根据自己的 curvature 找到采样时刻,
补偿到扫描结束时刻。8.1 为什么把上一帧末尾 IMU 插到当前帧前面
代码:
auto v_imu = meas.imu;
v_imu.push_front(last_imu_);作用是补齐 LiDAR 扫描开始附近的 IMU 时间连续性。
时间轴如下:
上一帧最后 IMU 本帧 LiDAR 开始 本帧第一条 IMU
t0 t_begin t1
●----------------------|------------------------●当前帧 meas.imu 可能从 t1 才开始;但去畸变和传播需要知道 t_begin 附近的运动状态。因此把上一帧保存的 last_imu_ 放到当前帧队首,形成连续 IMU 区间。
上一帧末尾 IMU
↓
last_imu_
↓
插入当前帧 IMU 队首
↓
当前扫描开始附近不会缺 IMU 区间这也是 last_imu_ 每帧结束都要更新的原因。
8.2 当前 LiDAR 的起止时间
常规 LiDAR:
double pcl_beg_time = meas.lidar_beg_time;
double pcl_end_time = meas.lidar_end_time;即:
pcl_beg_time = t_begin
pcl_end_time = t_endMARSIM 有特殊逻辑:
if (lidar_type == MARSIM)
{
pcl_beg_time = last_lidar_end_time_;
pcl_end_time = meas.lidar_beg_time;
}它不把当前点云当成真实扫描内逐点形成的点云,而是用相邻 LiDAR 消息之间的时间差进行状态传播。后面的逐点去畸变也会被跳过。
MARSIM:
传播状态:
上一帧 LiDAR 时间
↓
当前 LiDAR 消息时间
逐点补偿:
跳过这隐含假设是:仿真每帧点云是瞬时快照,不存在真实机械 LiDAR 的扫描内畸变。
8.3 为什么要按 curvature 排序
代码:
pcl_out = *(meas.lidar);
sort(
pcl_out.points.begin(),
pcl_out.points.end(),
time_list
);比较器是:
const bool time_list(
PointType &x,
PointType &y)
{
return (x.curvature < y.curvature);
};curvature 在这里不是几何曲率,而是当前点相对扫描开始的时间偏移,单位毫秒。
第 i 个点真实采样时刻:
t_i =
t_begin +
curvature_i / 1000排序后:
点云开始部分:
curvature ≈ 0 ms
点云中间部分:
curvature ≈ Tscan / 2
点云末尾部分:
curvature ≈ Tscan后面代码从点云尾部倒序处理,正好对应从扫描结束点回到扫描开始点。
9.IMU 前向传播:扫描期间轨迹如何生成
进入 UndistortPcl() 后,先保存当前状态:
state_ikfom imu_state = kf_state.get_x();然后建立 IMUpose:
IMUpose.clear();
IMUpose.push_back(
set_pose6d(
0.0,
acc_s_last,
angvel_last,
imu_state.vel,
imu_state.pos,
imu_state.rot.toRotationMatrix()
)
);IMUpose 可以理解为扫描期间的离散轨迹表:
IMUpose[k]:
offset_time
:该轨迹节点相对扫描开始的时间。
rot
:该时刻 IMU 世界姿态。
pos
:该时刻 IMU 世界位置。
vel
:该时刻 IMU 世界速度。
acc
:世界坐标系下的线加速度。
gyr
:去掉 gyro bias 后的角速度。这张表后面用于"某个 LiDAR 点在第几毫秒采到,就查询或插值得到该时刻 IMU 位姿"。
9.1 两条相邻 IMU 如何构成一个传播区间
代码遍历:
for (
auto it_imu = v_imu.begin();
it_imu < (v_imu.end() - 1);
it_imu++
)每次拿一对:
head:当前区间开始 IMU
tail:当前区间结束 IMU
head tail
t_k ----------------------------- t_k+1对两端 IMU 取中值:
angvel_avr <<
0.5 * (
head->angular_velocity.x +
tail->angular_velocity.x
),
...;
acc_avr <<
0.5 * (
head->linear_acceleration.x +
tail->linear_acceleration.x
),
...;数学形式:
ω_avg =
(ω_k + ω_k+1) / 2
a_avg =
(a_k + a_k+1) / 2
变量:
ω_k、ω_k+1
:相邻两条 IMU 的角速度测量。
a_k、a_k+1
:相邻两条 IMU 的加速度计测量。
ω_avg、a_avg
:当前短时间区间内使用的平均量。这是中值积分近似。它假设一个极短 IMU 区间内,角速度和加速度不会剧烈变化。
9.2 为什么要做加速度模长缩放
代码:
acc_avr =
acc_avr *
G_m_s2 /
mean_acc.norm();其作用是:
将当前加速度计读数按初始化阶段的平均重力模长缩放,
尽量使静止时加速度模长接近标准重力大小。公式可写为:
a_scaled =
a_raw · g / ||mean_acc||
变量:
a_raw
:当前 IMU 原始加速度读数。
mean_acc
:初始化阶段平均加速度。
g
:标准重力大小。
a_scaled
:经过尺度归一化后的加速度计读数。这里不能把 a_scaled 直接理解为世界系车辆加速度。它仍然是 IMU 坐标系下的比力。后面状态传播时,才会通过姿态、bias 和重力变成世界系线加速度。
9.3 IMU 的连续状态方程
从滤波意义看,kf_state.predict(dt, Q, in) 使用的核心模型可理解为:
p_dot = v
R_dot =
R · [ω_m - b_g - n_g]_x
v_dot =
R · (a_m - b_a - n_a)
+
g
变量:
p
:IMU 世界位置。
v
:IMU 世界速度。
R
:IMU 到世界坐标系的旋转。
ω_m
:陀螺仪测得角速度。
a_m
:加速度计测得比力。
b_g
:gyro bias。
b_a
:acc bias。
g
:世界系重力。
n_g、n_a
:IMU 白噪声。离散化后可近似理解为:
姿态传播:
R_(k+1) =
R_k · Exp(
(ω_m - b_g) · dt
)
速度传播:
v_(k+1) =
v_k +
[
R_k · (a_m - b_a)
+
g
] · dt
位置传播:
p_(k+1) =
p_k +
v_k · dt +
0.5 ·
[
R_k · (a_m - b_a)
+
g
] · dt²真实代码由 IKFoM 内部状态模型执行;当前文件负责提供 dt、IMU 输入 in 和过程噪声 Q。
9.4 过程噪声 Q 怎么写入
每个 IMU 区间都写:
Q.block<3, 3>(0, 0).diagonal() = cov_gyr;
Q.block<3, 3>(3, 3).diagonal() = cov_acc;
Q.block<3, 3>(6, 6).diagonal() = cov_bias_gyr;
Q.block<3, 3>(9, 9).diagonal() = cov_bias_acc;即:
Q =
diag(
cov_gyr,
cov_acc,
cov_bias_gyr,
cov_bias_acc
)
变量:
cov_gyr
:陀螺仪测量噪声方差。
cov_acc
:加速度计测量噪声方差。
cov_bias_gyr
:陀螺仪零偏随机游走方差。
cov_bias_acc
:加速度计零偏随机游走方差。随后:
kf_state.predict(dt, Q, in);不仅更新状态,也更新协方差:
P_(k+1) =
F_k · P_k · F_k^T
+
G_k · Q_k · G_k^T
变量:
P_k
:当前时刻状态协方差。
F_k
:状态转移 Jacobian。
G_k
:过程噪声 Jacobian。
Q_k
:IMU 过程噪声协方差。
P_(k+1)
:传播后的协方差。直观上,连续只靠 IMU 传播时,位置、姿态、速度和 bias 的不确定性会不断增加;这就是之后 LiDAR 匹配必须介入修正的原因。
10.为什么要跳过已经处理过的旧 IMU
代码:
if (
tail->header.stamp.toSec()
<
last_lidar_end_time_
)
{
continue;
}以及:
if (
head->header.stamp.toSec()
<
last_lidar_end_time_
)
{
dt =
tail->header.stamp.toSec()
-
last_lidar_end_time_;
}
else
{
dt =
tail->header.stamp.toSec()
-
head->header.stamp.toSec();
}原因是上一帧已经传播到:
last_lidar_end_time_当前帧队首又插入了上一帧末尾 IMU,因此新旧帧之间可能有时间重叠。
上一帧已经积分过:
------|------------------
last_lidar_end_time
当前 v_imu:
old imu --- head --- tail --- ...若 tail 仍然在上一帧结束之前,说明这一整段已经被积分过,必须跳过。
若:
head < last_lidar_end_time < tail则只积分尚未处理的后半段:
dt =
t_tail -
last_lidar_end_time这避免重复积分,否则位置、速度和姿态会被重复推进。
11.每个 IMU 时刻为什么都保存到 IMUpose
每次 predict() 后,代码执行:
imu_state = kf_state.get_x();
angvel_last =
angvel_avr -
imu_state.bg;
acc_s_last =
imu_state.rot *
(acc_avr - imu_state.ba);
for(int i = 0; i < 3; i++)
{
acc_s_last[i] += imu_state.grav[i];
}
double offs_t =
tail->header.stamp.toSec()
-
pcl_beg_time;
IMUpose.push_back(
set_pose6d(
offs_t,
acc_s_last,
angvel_last,
imu_state.vel,
imu_state.pos,
imu_state.rot.toRotationMatrix()
)
);这一步保存的是:
当前 IMU 时刻的:
姿态
位置
速度
世界系加速度
去偏角速度
相对扫描开始时间后续 LiDAR 点很多,例如一帧 10 万点;系统不可能为每个点都从扫描开始重新积分所有 IMU。正确做法是:
先为每个 IMU 时刻保存一组离散状态
↓
点 i 根据自己的 curvature
找到它所在的 IMU 时间段
↓
在这一小段内插值 / 短时间传播这就是 IMUpose 的作用。
12.传播到精确扫描结束时刻
当前 meas.imu 中最后一条 IMU 通常略早于 pcl_end_time。
源码:
double note =
pcl_end_time > imu_end_time ? 1.0 : -1.0;
dt =
note *
(pcl_end_time - imu_end_time);
kf_state.predict(dt, Q, in);正常情况下:
imu_end_time ≤ pcl_end_time所以:
dt =
pcl_end_time -
imu_end_time随后用最后一个 IMU 区间的输入继续传播到精确扫描结束时刻。
最后一条取出的 IMU:
t_imu_last = 10.095 s
扫描结束:
t_end = 10.0987 s
补传播:
dt = 0.0037 s最终得到:
^G R_I(t_end)
^G p_I(t_end)
^G v_I(t_end)
P^-这就是后续 LiDAR IESKF 优化前的先验状态。
注意:代码中 note 会使 dt 始终非负。正常 sync_packages() 设计下,最后取出的 IMU 时间不应晚于扫描结束,因此它通常等价于正向补传播。若未来代码错误地把晚于 t_end 的 IMU 放进 meas.imu,这里就不是严格的"回退传播",而会得到不符合物理语义的正时间预测;因此 sync_packages() 的时间边界必须保持正确。
13.逐点去畸变:真正如何补偿每个 LiDAR 点
前面只是建立了扫描期间 IMU 轨迹,并把状态推进到扫描结束时刻。真正逐点去畸变从这里开始:
if(lidar_type != MARSIM)
{
auto it_pcl = pcl_out.points.end() - 1;
for (
auto it_kp = IMUpose.end() - 1;
it_kp != IMUpose.begin();
it_kp--
)
{
...
}
}它从最后一个 LiDAR 点开始倒序处理,也从最后一个 IMU 轨迹节点开始倒序处理。
原因是:
点云已按 curvature 从小到大排序。
最后一个 LiDAR 点:
最接近扫描结束时刻。
最后一个 IMUpose:
最接近扫描结束时刻。
因此从后往前处理,
可以快速让每个点进入对应 IMU 时间区间。13.1 一个 LiDAR 点如何找到对应 IMU 区间
对某个点:
t_point_offset =
curvature / 1000代码判断:
for(
;
it_pcl->curvature / double(1000)
>
head->offset_time;
it_pcl--
)可以理解为:
当前点:
head.offset_time
<
t_point_offset
≤
tail.offset_time即该点位于当前 IMU 小区间:
IMU head 点 i IMU tail
t_h --------------------- t_i ------------------- t_t这时:
head
:作为当前点插值的起始状态。
tail
:提供该时间段内的加速度、角速度近似值。13.2 点采样时刻姿态怎么得到
代码:
dt =
it_pcl->curvature / double(1000)
-
head->offset_time;
M3D R_i(
R_imu *
Exp(angvel_avr, dt)
);对应公式:
^G R_I(t_i) =
^G R_I(t_h)
·
Exp(
ω · Δt_i
)
变量:
^G R_I(t_h)
:当前 IMU 区间起点姿态。
ω
:代码保存的去偏角速度。
Δt_i
:点时刻相对区间起点的时间。
^G R_I(t_i)
:第 i 个点采样时刻的 IMU 世界姿态。这里使用的是短时间近似:一个 IMU 小区间内认为角速度近似恒定。
13.3 点采样时刻位置怎么得到
代码:
V3D T_ei(
pos_imu
+
vel_imu * dt
+
0.5 * acc_imu * dt * dt
-
imu_state.pos
);前半部分是点时刻的位置估计:
^G p_I(t_i) ≈
^G p_I(t_h)
+
^G v_I(t_h) · Δt_i
+
0.5 · ^G a_I · Δt_i²再减去扫描结束位置:
T_ei =
^G p_I(t_i)
-
^G p_I(t_e)
变量:
^G p_I(t_i)
:点采样时刻 IMU 世界位置。
^G p_I(t_e)
:扫描结束时刻 IMU 世界位置。
T_ei
:点时刻 IMU 原点相对结束时刻 IMU 原点的位移;
表达在世界坐标系中。这一步补偿的是扫描期间的平移。
如果只补姿态、不补位置,车辆前进时墙面仍会拉宽、近处货架仍会重影。
13.4 完整去畸变变换
核心代码:
V3D P_compensate =
imu_state.offset_R_L_I.conjugate() *
(
imu_state.rot.conjugate() *
(
R_i *
(
imu_state.offset_R_L_I * P_i +
imu_state.offset_T_L_I
)
+ T_ei
)
-
imu_state.offset_T_L_I
);它实际完成的是下面四次坐标变换。
第 1 步:LiDAR_ti → IMU_ti
^I p_i =
^I R_L · ^L_ti p_i
+
^I t_L
第 2 步:IMU_ti → 世界系
^G p_i =
^G R_I(t_i) · ^I p_i
+
^G p_I(t_i)
第 3 步:世界系 → IMU_te
^I_te p_i =
(^G R_I(t_e))^T
·
(
^G p_i
-
^G p_I(t_e)
)
第 4 步:IMU_te → LiDAR_te
^L_te p_i =
(^I R_L)^T
·
(
^I_te p_i
-
^I t_L
)合并后:
^L_te p_i =
(^I R_L)^T
·
[
(^G R_I(t_e))^T
·
(
^G R_I(t_i)
·
(
^I R_L · ^L_ti p_i
+
^I t_L
)
+
^G p_I(t_i)
-
^G p_I(t_e)
)
-
^I t_L
]
变量:
^L_ti p_i
:第 i 个点原始坐标;
位于其实际采样时刻 ti 的 LiDAR 系。
^L_te p_i
:去畸变后坐标;
统一到扫描结束时刻 te 的 LiDAR 系。
^I R_L、^I t_L
:LiDAR-IMU 外参。
^G R_I(t_i)、^G p_I(t_i)
:点采样时刻 IMU 位姿。
^G R_I(t_e)、^G p_I(t_e)
:扫描结束时刻 IMU 位姿。最终:
it_pcl->x = P_compensate(0);
it_pcl->y = P_compensate(1);
it_pcl->z = P_compensate(2);这一帧所有点都会统一表达在扫描结束 LiDAR 坐标系。
14.源码注释"只用旋转"为什么不准确
代码旁边有注释:
/* Transform to the 'end' frame, using only the rotation */但从实际计算看,代码并不是只用旋转。
它显式使用:
R_i
:点采样时刻姿态。
imu_state.rot.conjugate()
:扫描结束时刻逆姿态。
T_ei
:扫描期间平移补偿。
offset_T_L_I
:LiDAR-IMU 杆臂平移外参。所以真实补偿包含:
扫描期间旋转补偿
+
扫描期间平移补偿
+
LiDAR-IMU 杆臂补偿源码末尾还写了:
// not accurate!这是作者对近似模型的提醒。近似来源包括:
1.IMU 小区间内角速度近似恒定。
2.IMU 小区间内世界系加速度近似恒定。
3.点时刻位置使用二阶运动学公式。
4.每个点不重新跑完整 IESKF 传播,
而是在附近 IMU 轨迹节点间做短时间估计。在低速、IMU 高频、时间同步准确时,这种近似通常足够;急转、急加速、剧烈震动、外参误差或时间偏差较大时,去畸变误差会明显变大。
15.没有逐点时间、没有 IMU、MARSIM 三种情况
15.1 有 IMU,但点云没有逐点时间
本文件不会帮你补时间。它只读取:
it_pcl->curvature / double(1000)所以进入这里之前,preprocess.cpp 必须已经写好:
curvature_i
=
第 i 个点相对扫描开始的时间,单位 ms机械 LiDAR 若没有原始 point.time,可在前处理阶段用:
每条 ring 的首点 yaw
+
当前点 yaw
+
SCAN_RATE估计时间。
omega_l =
0.361 × SCAN_RATE
curvature_i =
(yaw_first - yaw_i) / omega_l15.2 没有 IMU
代码:
if(meas.imu.empty()) {return;};因此:
没有 IMU
↓
本帧不初始化
不预测状态
不建立 IMUpose
不逐点去畸变它不会自动切换为 ICP、NDT、纯 LiDAR odometry 或匀速去畸变。
15.3 MARSIM
MARSIM 分支:
仍进行 IMU 状态传播。
但不进行逐点 LiDAR 坐标补偿。前提是仿真点云为瞬时快照。如果仿真点云实际上模拟了扫描过程,而 curvature 又全为 0,车辆运动时仍会出现扫描内畸变。
16.当前代码中值得特别注意的实现细节
下面是从你贴出的这份文件中能直接看出的注意点。
1.last_lidar_end_time_ 在可见构造函数与 Reset() 中没有显式赋值。
它后面参与:
tail_time < last_lidar_end_time_
以及:
pcl_beg_time = last_lidar_end_time_
若对象不是静态零初始化、或外部未先写入该值,
首帧正常传播前可能存在未定义初值风险。
2.acc_s_last 在可见构造函数和 Reset() 中也没有明确置零。
但首次正常 UndistortPcl() 会把它放入:
IMUpose.push_back(
set_pose6d(0.0, acc_s_last, ...)
)
若没有其他位置提前设置它,
第一帧的初始轨迹节点可能带入未初始化数据。
3.cov_acc_scale、cov_gyr_scale 没有在构造函数内显示初始化。
初始化完成后:
cov_acc = cov_acc_scale;
cov_gyr = cov_gyr_scale;
因此外层必须调用:
set_acc_cov()
set_gyr_cov()
否则运行噪声参数可能不可靠。
4.点云中 curvature = 0 的点不会进入最后一段补偿循环。
循环条件是:
curvature / 1000 > head->offset_time
第一段 head->offset_time 通常为 0。
因此 curvature 恰好为 0 的点不会被变换,
仍保留扫描开始时刻 LiDAR 坐标。
若这种点数量很多,且机器人扫描期间运动明显,
这是需要关注的边界行为。
5.Reset(double start_timestamp, lastimu) 在类中声明,
但你贴出的内容中没有看到对应实现。
若工程其他文件也没有实现、且外部调用它,
会产生链接错误。
是否实际有问题,
还需要查完整工程调用关系。
6.MARSIM 的时间语义与普通 LiDAR 不同。
普通 LiDAR:
扫描时间由 t_begin 到 t_end。
MARSIM:
传播时间改为上一帧结束到当前帧开始,
并且不做逐点补偿。
不能把普通雷达的时间逻辑直接套到 MARSIM。总结
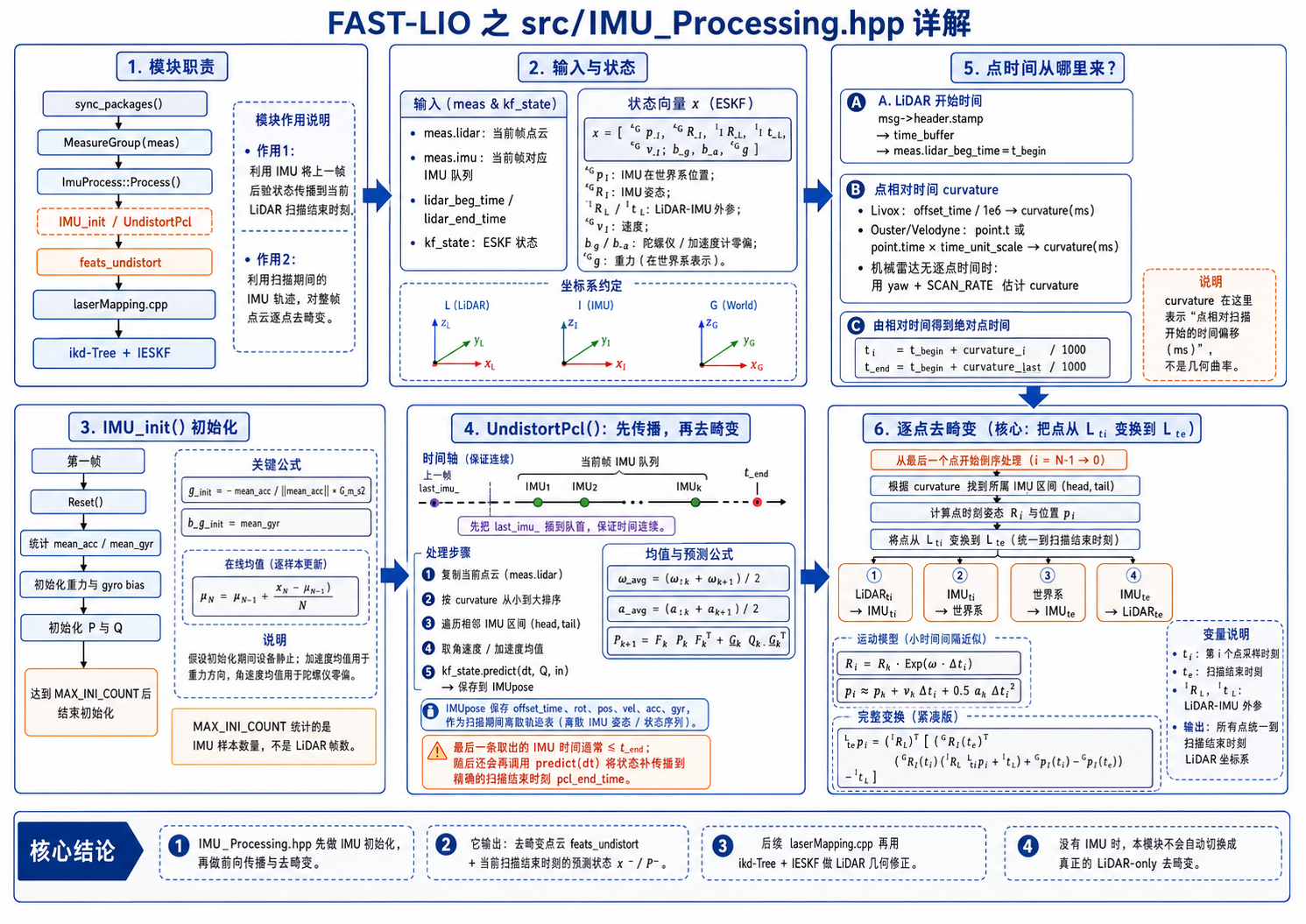
src/IMU_Processing.hpp 的本质不是"读 IMU 然后算一个位姿",而是建立一套完整的扫描内连续运动模型。LiDAR 一帧点云不是同一时刻形成的:10 Hz 雷达的一帧通常跨越约 100 ms,扫描开始的点和扫描结束的点之间,机器人可能已经旋转、平移、加速,LiDAR 原点本身的位置和朝向都变了。若把这些点直接视为同一时刻点云送去匹配,静止时可能看不出问题,但车辆一转弯、加速、经过颠簸区域,墙面会变厚、柱子会出现双边、直线会弯曲,后面的 ikd-Tree 搜索和 IESKF 也只能建立在已经畸变的点云上。
这份文件先在启动阶段做快速 IMU 初始化。它用静止期的平均加速度估计重力方向,用平均角速度估计陀螺仪零偏,并初始化外参、噪声与状态协方差。初始化过程隐含"设备应相对静止"的前提,因为一旦小车刚启动就加速或旋转,真实运动会混入平均值,导致系统把真实角速度误当成 bias,把真实线加速度混入重力估计。代码中的 MAX_INI_COUNT=10 统计的是 IMU 样本数量,不是 10 帧 LiDAR;对于高频 IMU,这一过程实际可能非常快,所以工程上最好让雷达和 IMU 上电后静止一小段时间。
初始化完成后,UndistortPcl() 才进入正常工作。它先把上一帧最后一条 IMU 放进当前帧 IMU 队列前端,避免 LiDAR 扫描开始附近没有可用 IMU 区间;接着按 curvature 对当前点云排序。这里的 curvature 不是传统意义上的点云几何曲率,而是 preprocess.cpp 写入的"点相对扫描开始时刻的时间偏移",单位通常是毫秒。每个点的真实采样时间由 t_begin + curvature / 1000 得到。没有这个逐点时间,IMU 虽然知道小车怎么运动,却不知道每一个 LiDAR 点具体是在扫描的第几毫秒采到,因此也无法做严格逐点去畸变。
随后系统将扫描期间相邻 IMU 组成小时间段,对每一段取角速度和加速度中值,调用 kf_state.predict() 传播位置、姿态、速度、bias、重力和协方差。每传播到一个 IMU 时刻,代码都会把该时刻的姿态、位置、速度、世界加速度和去偏角速度保存到 IMUpose。这相当于建立了一条离散的扫描内 IMU 轨迹。当前帧最后一条被取出的 IMU 通常早于 LiDAR 精确结束时间,因此代码会继续用最后一段 IMU 输入短时间预测到 pcl_end_time,得到 LiDAR 匹配前的先验状态 x^- 和预测协方差 P^-。
真正逐点去畸变时,代码从扫描末尾点开始倒序遍历。对于每个点,它先根据 curvature 找到对应的 IMU 区间;然后使用该区间起始姿态、速度、位置,加上短时间的恒角速度、恒加速度近似,估计点采样时刻的 IMU 姿态和位置。接下来,点先从采样时刻 LiDAR 坐标系通过外参变到采样时刻 IMU 坐标系,再变到世界坐标系,再转换到扫描结束时刻 IMU 坐标系,最后通过外参回到扫描结束时刻 LiDAR 坐标系。这样整帧点云最终都变成"扫描结束瞬间 LiDAR 所看到的环境",后面的 laserMapping.cpp 就能把它当作近似同步点云来做体素降采样、ikd-Tree 最近邻搜索、局部平面拟合和 IESKF 优化。
从系统职责上看,IMU 在 FAST-LIO 中提供的是高频连续运动信息,但它会随时间漂移;LiDAR 提供的是低频但几何约束强的环境信息,用于反向修正 IMU 漂移。IMU_Processing.hpp 的输出正是二者之间的桥梁:它输出一帧时空统一的去畸变点云,以及扫描结束时刻的 IMU 预测状态。后续 LiDAR 匹配不是替代 IMU,而是在 IMU 提供的先验上进行几何修正。只要逐点时间、LiDAR-IMU 时间同步、外参和噪声模型其中一项严重错误,去畸变就会先出问题,进而影响后面的匹配、优化和地图质量。