原创代码,请勿翻卖
文章目录
程序简介
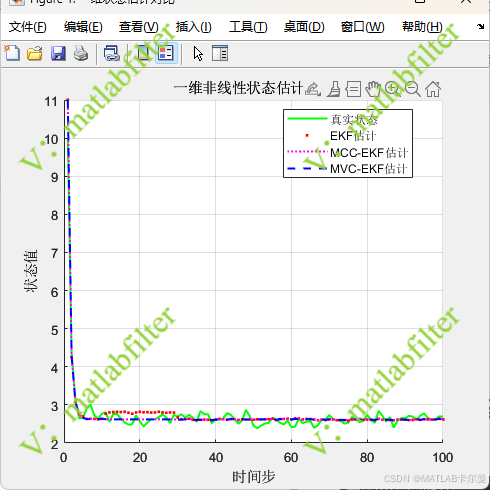
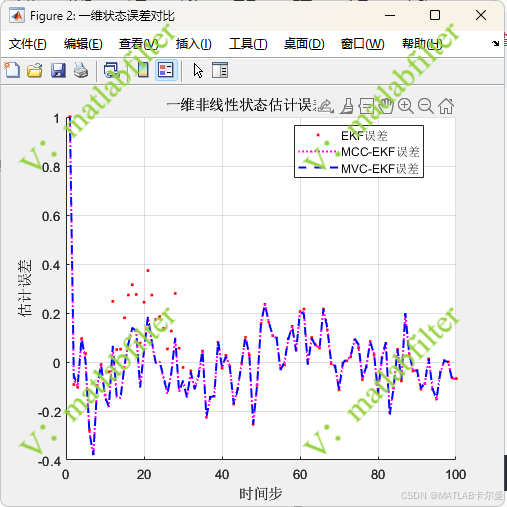
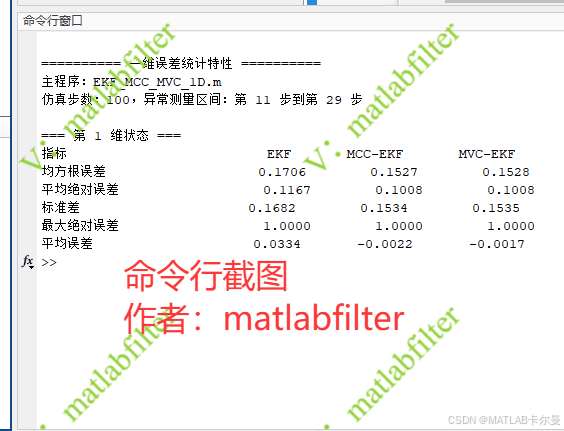
代码主要用来演示一维非线性系统中的鲁棒状态估计问题。程序先构造了一个带平方根非线性的状态转移模型和观测模型,然后人为在第 11 步到第 29 步之间加入一段明显的异常测量,用来模拟传感器突发干扰、测量跳变或外界噪声污染的情况。在滤波部分,代码同时实现并对比了经典 EKF、MCC-EKF 和 MVC-EKF 三种方法:普通 EKF 按照常规扩展卡尔曼滤波流程进行预测和更新,而 MCC-EKF 和 MVC-EKF 会根据残差大小动态调整测量权重,把不太可信的异常观测"降权处理",从而减小异常值对估计结果的冲击。最后,程序会绘制真实状态、三种滤波估计曲线以及对应的误差曲线,并输出 RMSE、平均绝对误差、标准差、最大误差和平均误差等统计指标。整体来看,这个例程不是单纯跑一个滤波器,而是比较直观地展示了在存在异常测量时,鲁棒滤波方法相对于传统 EKF 的抗干扰优势。
运行结果
状态曲线对比:
误差对比:
命令行截图:
程序结构:
MATLAB源代码
部分代码如下:
matlab
% 一维非线性状态估计:经典 EKF、MCC-EKF、MVC-EKF 对比
% 程序功能:在含异常测量的场景下,对比三种滤波方法的估计曲线和误差统计。
% 修正说明:MCC/MVC 权重通过测量协方差膨胀进入滤波更新,避免直接逐元素乘卡尔曼增益造成维度和含义错误。
clear; clc; close all;
rng(0);
%% 参数设置
n = 1; % 状态维度
m = 1; % 测量维度
N = 100; % 仿真步数
min_state = 1e-6; % 平方根模型的正值保护
Q = 0.01 * eye(n); % 过程噪声协方差
R = 0.25 * eye(m); % 测量噪声协方差
process_chol = chol(Q, 'lower');
measurement_chol = chol(R, 'lower');
sigma_mcc = 2.5; % MCC 高斯核带宽
alpha_mvc = 2.5; % MVC 核函数尺度参数
min_weight = 1e-3; % 鲁棒权重下限,避免协方差无限放大
% 一维非线性状态方程和观测方程
f = @(x) sqrt(max(x, min_state)) + 1.0;
F = @(x) 0.5 ./ sqrt(max(x, min_state));
h = @(x) sqrt(max(x, min_state)) + 0.2 * x;
H = @(x) 0.5 ./ sqrt(max(x, min_state)) + 0.2;
method_names = {'EKF', 'MCC-EKF', 'MVC-EKF'};
method_count = numel(method_names);
x_true = zeros(n, N); % 真实状态
x_est = zeros(n, N, method_count); % 三种方法的估计状态
y_meas = zeros(m, N); % 测量序列
P = zeros(n, n, method_count); % 三种方法的协方差矩阵
x_true(:, 1) = 10;
for method = 1:method_count
x_est(:, 1, method) = x_true(:, 1) + 1.0;
P(:, :, method) = eye(n);
end
%% 生成真实状态和含异常值的测量数据
...完整代码:
https://download.csdn.net/download/callmeup/93058684
前沿研究课题推荐
-
基于信息理论学习的信息滤波 (Information Theoretic Filtering)
除了 MCC (最大相关熵准则) 和 MVC (最小方差准则),探索 混合熵(Rényi / Shannon 熵)、Cauchy-Schwarz 散度 在构建鲁棒代价函数中的应用,解决非高斯、重尾噪声下的状态估计问题。
-
自适应核带宽 MCKF (Maximum Correntropy Kalman Filter)
当前代码使用固定核带宽
σ_mcc,但实际噪声环境时变。研究 自适应带宽更新策略(如基于残差统计、在线贝叶斯优化)可显著提高滤波器的环境适应能力。 -
学生 t-分布与变分贝叶斯鲁棒滤波
将状态与噪声建模为 学生 t-分布 而非高斯分布,通过 变分贝叶斯推断 在线估计自由度参数,实现对重尾噪声的抗干扰能力,在 GNSS/INS 组合导航中已有成功应用。
-
深度 Learning-Learned 鲁棒测量协方差估计
将 深度神经网络(DNN/LSTM) 作为辅助观测判定器,实时判断当前测量是否可信并动态修正协方差
R,实现 模型驱动 + 数据驱动 的混合鲁棒滤波。 -
MCC-UKF / HCKF (高阶容积卡尔曼滤波) 在高维强非线性系统中的应用
当前例程为一维演示,实际导航、目标跟踪系统维度高。将 MCC 损失框架与 UKF、CKF (容积卡尔曼滤波) 或 粒子滤波 结合,挑战高维非线性的鲁棒状态估计。
-
基于集合论 (Set-Membership) 的有界误差滤波
不同于 EKF 的"点估计 + 协方差"思路,全对称多胞体滤波 (Zonotopic Filtering) 可得到包含真实状态的有界集合,对异常值天然免疫,适用于安全攸关的自动驾驶定位。
-
对抗性攻击下的鲁棒状态估计
研究 GPS 欺骗 / LiDAR 点云投毒 等恶意攻击场景下,如何利用 MCC / M-estimator 等方法检测并抑制不可见传感器攻击,保障自动驾驶/无人机定位安全。
如需帮助,或有导航、定位滤波相关的代码定制需求,可从个人主页左侧联系我