看官方的参考手册,边看边调,做些记录,也供有需要的人参考。
时钟源的选择可以参考这篇文章,写的很清晰
STM定时器时钟源选择函数_stm32 定时器选择时钟源-CSDN博客
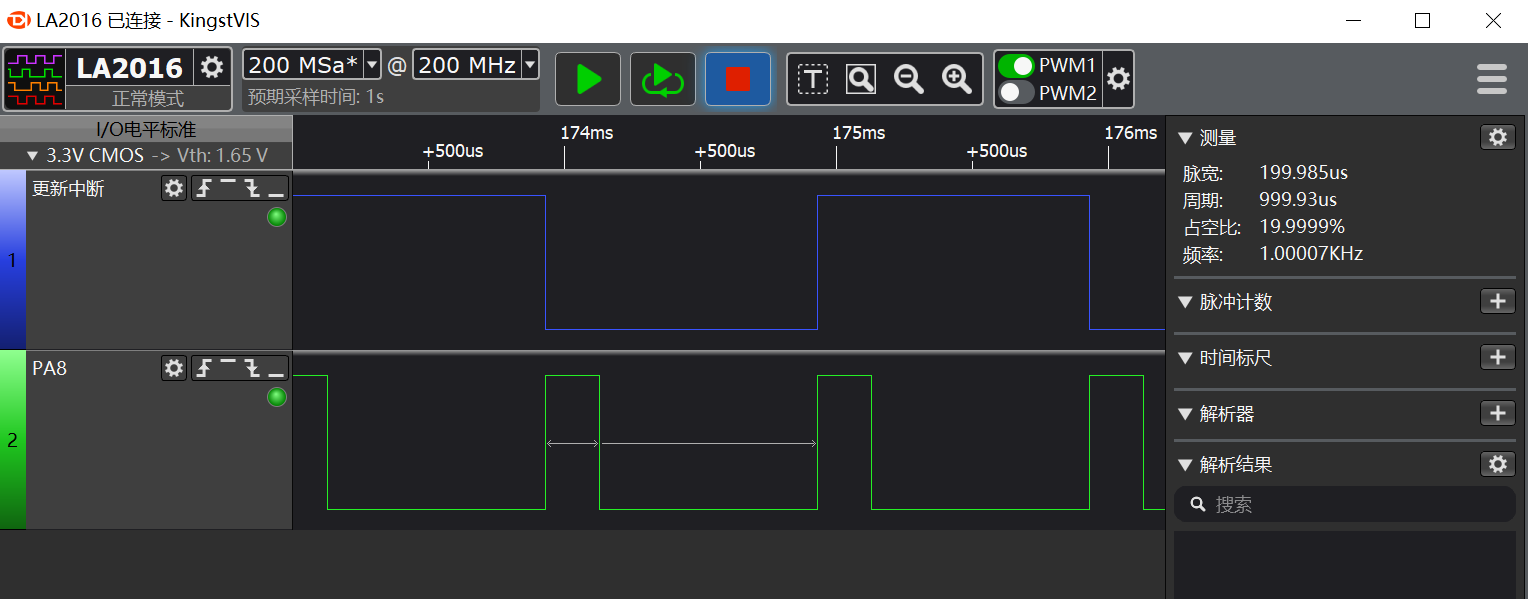
1、内部时钟源(CK_INT):时基配置、PWM输出、更新中断
复位后默认是内部时钟源
void GPIOInit(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
/* GPIOA Configuration: Channel 1, 2 and 3 as alternate function push-pull */
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8 ;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
/* GPIOB Configuration: Channel 1N, 2N and 3N as alternate function push-pull */
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_Init(GPIOB, &GPIO_InitStruct);
//输出GPIO方便观察波形
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_13|GPIO_Pin_14;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStruct);
}
void TIM1_Init(void)//1毫秒定时
{
//时基设置
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
/* Time Base configuration */
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period =999;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
//输出设置
TIM_OCInitTypeDef TIM_OCInitStructure;
/* Channel 1, 2,3 and 4 Configuration in PWM mode */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable;
TIM_OCInitStructure.TIM_Pulse = 200;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
//中断设置
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//使能更新中断
TIM_ClearFlag(TIM1,TIM_FLAG_Update);
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);
//使能定时器
TIM_Cmd(TIM1, ENABLE);
//PWM输出
TIM_CtrlPWMOutputs(TIM1, ENABLE);
}
void TIM1_UP_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1,TIM_IT_Update)==SET)
{
TIM_ClearFlag(TIM1,TIM_FLAG_Update);
GPIOC->ODR^=GPIO_Pin_13;
}
}
int main (void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
RCC_ClocksTypeDef RCC_Clocks;
RCC_GetClocksFreq(&RCC_Clocks); //查看RCC时钟配置结果
GPIOInit();
TIM1_Init();
// TIM_ETR_Init();
while(1)
{
}
}
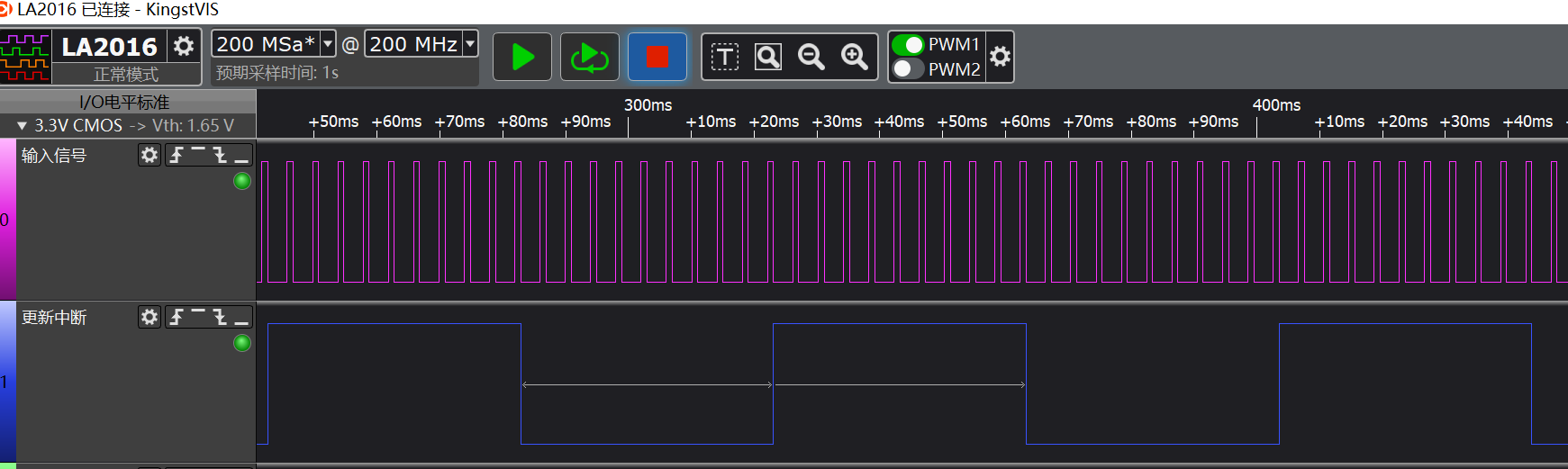
2、外部时钟模式1:外部输入引脚
void TIM_TIxExternalClock_Init(void)
{
//第一步:开启外部时钟和外设时钟(注意使用APB1的开启时钟函数,因为TIM2是APB1总线的外设
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
TIM_TIxExternalClockConfig(TIM1,TIM_TIxExternalCLK1Source_TI1,TIM_ICPolarity_Rising,0);
//第三步:配置时基单元(在stm32f10x_tim.h文件中查找函数)
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//指定计数器模式(此处选择向上计数)
TIM_TimeBaseInitStructure.TIM_Period = 10 - 1;//指定要在下一次更新事件时加载到ARR自动重新加载寄存器中的周期值 ARR取值[0,65535]
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1;//指定用于划分TIM时钟的预分频器值 PSC取值[0,65535]
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//指定重复计数器的值(高级定时器才用得上,本项目给0)
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStructure);//初始化时基单元
TIM_ClearFlag(TIM1,TIM_FLAG_Update);
//第四步:使能更新中断(在stm32f10x_tim.h文件中查找函数)
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);
//开启了更新中断到NVIC的通路
//第五步:配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//NVIC优先级分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn;//指定中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//指定IRQ通道的抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//指定IRQ通道的响应优先级
NVIC_Init(&NVIC_InitStructure);
//第六步:启动定时器(在stm32f10x_tim.h文件中查找函数)
TIM_Cmd(TIM1,ENABLE);
//至此定时器就可以开始工作了,当产生更新时,就会触发中断
}
3、外部时钟模式2:外部触发输入ETR
void TIM_ETR_Init(void)
{
//第一步:开启外部时钟和外设时钟(注意使用APB1的开启时钟函数,因为TIM2是APB1总线的外设
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
//需要额外配置GPIO来驱动对射式红外传感器
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//第二步:选择时基单元的时钟(在stm32f10x_tim.h文件中查找函数)
TIM_ETRClockMode2Config(TIM1,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_Inverted,0x00);
//通过ETR引脚的外部时钟模式2配置
//时基单元就由外部时钟ETR(查表可知引脚PA0)驱动了
//第三步:配置时基单元(在stm32f10x_tim.h文件中查找函数)
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//指定时钟分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//指定计数器模式(此处选择向上计数)
TIM_TimeBaseInitStructure.TIM_Period = 10 - 1;//指定要在下一次更新事件时加载到ARR自动重新加载寄存器中的周期值 ARR取值[0,65535]
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1;//指定用于划分TIM时钟的预分频器值 PSC取值[0,65535]
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//指定重复计数器的值(高级定时器才用得上,本项目给0)
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStructure);//初始化时基单元
TIM_ClearFlag(TIM1,TIM_FLAG_Update);
//第四步:使能更新中断(在stm32f10x_tim.h文件中查找函数)
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);
//开启了更新中断到NVIC的通路
//第五步:配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//NVIC优先级分组
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn;//指定中断通道
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;//指定IRQ通道的抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;//指定IRQ通道的响应优先级
NVIC_Init(&NVIC_InitStructure);
//第六步:启动定时器(在stm32f10x_tim.h文件中查找函数)
TIM_Cmd(TIM1,ENABLE);
//至此定时器就可以开始工作了,当产生更新时,就会触发中断
}