Dlib是一个功能丰富的C++库,设计用于构建复杂的软件系统,尤其在机器学习、计算机视觉和数值计算等领域有着广泛的应用。以下是对Dlib的简要介绍:
-
特性:
- 机器学习算法:Dlib包含了各种机器学习算法,如支持向量机(SVMs)、决策树、随机森林、神经网络等。
- 深度学习框架:Dlib有一个简洁而强大的深度学习接口,允许开发者定义和训练自己的卷积神经网络(CNNs)。
- 图像处理:提供图像处理和计算机视觉工具,如面部特征检测、物体检测、图像变换等。
- 数学工具:提供线性代数、优化算法和统计工具,适合数值计算任务。
- 实用工具:包括日志记录、线程管理、内存管理、序列化等功能。
-
文档和示例:
- 全面文档:Dlib的每个类和函数都有详细的文档说明,方便开发者理解和使用。
- 调试支持:在调试模式下,Dlib提供帮助调试代码的功能,有助于快速定位问题。
- 示例代码:官方提供许多实例代码,便于学习和参考。
-
平台兼容性:
- 跨平台:Dlib可以在Windows、Mac OS和Linux等多种操作系统上编译和运行。
- 独立性:不依赖于第三方库,易于集成到项目中,编译过程简单。
-
开源许可:
- BSD许可证:Dlib采用宽松的BSD许可证,允许在商业和非商业项目中免费使用。
-
应用领域:
- 工业界:在机器人、嵌入式设备、移动应用等领域有应用。
- 学术界:在研究项目中作为强大的工具,用于实验和原型设计。
环境搭建
源码地址:https://github.com/davisking/dlib
人脸检测
cpp
#include <dlib/image_processing/frontal_face_detector.h>
#include <dlib/image_processing.h>
#include <dlib/opencv.h>
#include <opencv2/opencv.hpp>
void FaceDetector(cv::Mat& img)
{
// 加载人脸检测器
auto detector = dlib::get_frontal_face_detector();
// 将图片转换为dlib图像格式
dlib::cv_image<dlib::bgr_pixel> cimg(cvIplImage(img));
// 检测人脸
std::vector<dlib::rectangle> dets = detector(cimg);
std::cout << "number of faces detected:" << dets.size() << std::endl;
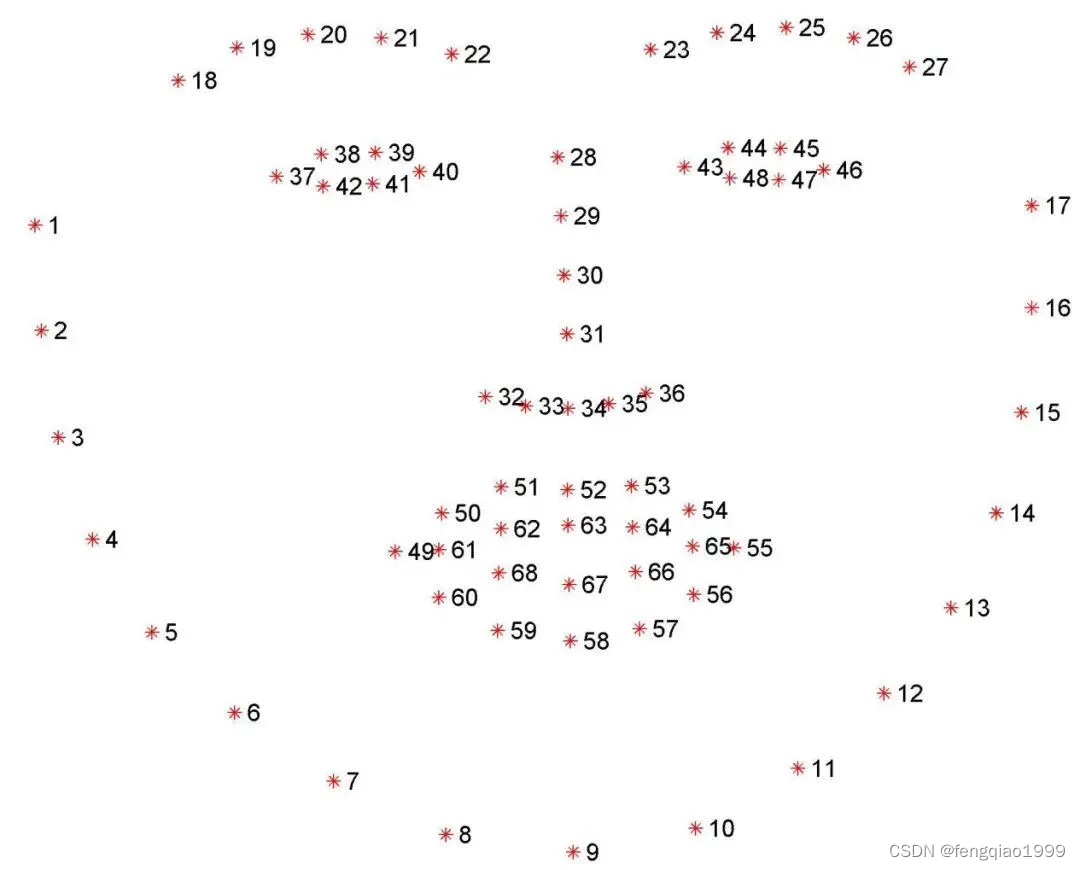
}人脸关键点检测
关键点分布
示例代码
cpp
#include <dlib/image_processing/frontal_face_detector.h>
#include <dlib/image_processing/render_face_detections.h>
#include <dlib/image_processing.h>
#include <dlib/opencv.h>
using namespace dlib;
using namespace std;
int main()
{
// 加载人脸检测器
frontal_face_detector detector = get_frontal_face_detector();
// 加载人脸关键点检测器
shape_predictor sp;
deserialize("shape_predictor_68_face_landmarks.dat") >> sp;
// 读取图片
cv::Mat img = cv::imread("image.jpg");
// 将图片转换为dlib图像格式
cv_image<bgr_pixel> cimg(img);
// 检测人脸
std::vector<rectangle> faces = detector(cimg);
// 选择最大的人脸
int max_area = 0;
rectangle max_face;
for (int i = 0; i < faces.size(); i++)
{
int area = faces[i].area();
if (area > max_area)
{
max_area = area;
max_face = faces[i];
}
}
// 检测关键点
full_object_detection shape = sp(cimg, max_face);
}人脸识别
参考代码
cpp
#include <dlib/dnn.h>
#include <dlib/gui_widgets.h>
#include <dlib/clustering.h>
#include <dlib/string.h>
#include <dlib/image_io.h>
#include <dlib/image_processing/frontal_face_detector.h>
using namespace dlib;
using namespace std;
// ----------------------------------------------------------------------------------------
// The next bit of code defines a ResNet network. It's basically copied
// and pasted from the dnn_imagenet_ex.cpp example, except we replaced the loss
// layer with loss_metric and made the network somewhat smaller. Go read the introductory
// dlib DNN examples to learn what all this stuff means.
//
// Also, the dnn_metric_learning_on_images_ex.cpp example shows how to train this network.
// The dlib_face_recognition_resnet_model_v1 model used by this example was trained using
// essentially the code shown in dnn_metric_learning_on_images_ex.cpp except the
// mini-batches were made larger (35x15 instead of 5x5), the iterations without progress
// was set to 10000, and the training dataset consisted of about 3 million images instead of
// 55. Also, the input layer was locked to images of size 150.
template <template <int,template<typename>class,int,typename> class block, int N, template<typename>class BN, typename SUBNET>
using residual = add_prev1<block<N,BN,1,tag1<SUBNET>>>;
template <template <int,template<typename>class,int,typename> class block, int N, template<typename>class BN, typename SUBNET>
using residual_down = add_prev2<avg_pool<2,2,2,2,skip1<tag2<block<N,BN,2,tag1<SUBNET>>>>>>;
template <int N, template <typename> class BN, int stride, typename SUBNET>
using block = BN<con<N,3,3,1,1,relu<BN<con<N,3,3,stride,stride,SUBNET>>>>>;
template <int N, typename SUBNET> using ares = relu<residual<block,N,affine,SUBNET>>;
template <int N, typename SUBNET> using ares_down = relu<residual_down<block,N,affine,SUBNET>>;
template <typename SUBNET> using alevel0 = ares_down<256,SUBNET>;
template <typename SUBNET> using alevel1 = ares<256,ares<256,ares_down<256,SUBNET>>>;
template <typename SUBNET> using alevel2 = ares<128,ares<128,ares_down<128,SUBNET>>>;
template <typename SUBNET> using alevel3 = ares<64,ares<64,ares<64,ares_down<64,SUBNET>>>>;
template <typename SUBNET> using alevel4 = ares<32,ares<32,ares<32,SUBNET>>>;
using anet_type = loss_metric<fc_no_bias<128,avg_pool_everything<
alevel0<
alevel1<
alevel2<
alevel3<
alevel4<
max_pool<3,3,2,2,relu<affine<con<32,7,7,2,2,
input_rgb_image_sized<150>
>>>>>>>>>>>>;
// ----------------------------------------------------------------------------------------
std::vector<matrix<rgb_pixel>> jitter_image(
const matrix<rgb_pixel>& img
);
// ----------------------------------------------------------------------------------------
int main(int argc, char** argv) try
{
if (argc != 2)
{
cout << "Run this example by invoking it like this: " << endl;
cout << " ./dnn_face_recognition_ex faces/bald_guys.jpg" << endl;
cout << endl;
cout << "You will also need to get the face landmarking model file as well as " << endl;
cout << "the face recognition model file. Download and then decompress these files from: " << endl;
cout << "http://dlib.net/files/shape_predictor_5_face_landmarks.dat.bz2" << endl;
cout << "http://dlib.net/files/dlib_face_recognition_resnet_model_v1.dat.bz2" << endl;
cout << endl;
return 1;
}
// The first thing we are going to do is load all our models. First, since we need to
// find faces in the image we will need a face detector:
frontal_face_detector detector = get_frontal_face_detector();
// We will also use a face landmarking model to align faces to a standard pose: (see face_landmark_detection_ex.cpp for an introduction)
shape_predictor sp;
deserialize("shape_predictor_5_face_landmarks.dat") >> sp;
// And finally we load the DNN responsible for face recognition.
anet_type net;
deserialize("dlib_face_recognition_resnet_model_v1.dat") >> net;
matrix<rgb_pixel> img;
load_image(img, argv[1]);
// Display the raw image on the screen
image_window win(img);
// Run the face detector on the image of our action heroes, and for each face extract a
// copy that has been normalized to 150x150 pixels in size and appropriately rotated
// and centered.
std::vector<matrix<rgb_pixel>> faces;
for (auto face : detector(img))
{
auto shape = sp(img, face);
matrix<rgb_pixel> face_chip;
extract_image_chip(img, get_face_chip_details(shape,150,0.25), face_chip);
faces.push_back(move(face_chip));
// Also put some boxes on the faces so we can see that the detector is finding
// them.
win.add_overlay(face);
}
if (faces.size() == 0)
{
cout << "No faces found in image!" << endl;
return 1;
}
// This call asks the DNN to convert each face image in faces into a 128D vector.
// In this 128D vector space, images from the same person will be close to each other
// but vectors from different people will be far apart. So we can use these vectors to
// identify if a pair of images are from the same person or from different people.
std::vector<matrix<float,0,1>> face_descriptors = net(faces);
// In particular, one simple thing we can do is face clustering. This next bit of code
// creates a graph of connected faces and then uses the Chinese whispers graph clustering
// algorithm to identify how many people there are and which faces belong to whom.
std::vector<sample_pair> edges;
for (size_t i = 0; i < face_descriptors.size(); ++i)
{
for (size_t j = i; j < face_descriptors.size(); ++j)
{
// Faces are connected in the graph if they are close enough. Here we check if
// the distance between two face descriptors is less than 0.6, which is the
// decision threshold the network was trained to use. Although you can
// certainly use any other threshold you find useful.
if (length(face_descriptors[i]-face_descriptors[j]) < 0.6)
edges.push_back(sample_pair(i,j));
}
}
std::vector<unsigned long> labels;
const auto num_clusters = chinese_whispers(edges, labels);
// This will correctly indicate that there are 4 people in the image.
cout << "number of people found in the image: "<< num_clusters << endl;
// Now let's display the face clustering results on the screen. You will see that it
// correctly grouped all the faces.
std::vector<image_window> win_clusters(num_clusters);
for (size_t cluster_id = 0; cluster_id < num_clusters; ++cluster_id)
{
std::vector<matrix<rgb_pixel>> temp;
for (size_t j = 0; j < labels.size(); ++j)
{
if (cluster_id == labels[j])
temp.push_back(faces[j]);
}
win_clusters[cluster_id].set_title("face cluster " + cast_to_string(cluster_id));
win_clusters[cluster_id].set_image(tile_images(temp));
}
// Finally, let's print one of the face descriptors to the screen.
cout << "face descriptor for one face: " << trans(face_descriptors[0]) << endl;
// It should also be noted that face recognition accuracy can be improved if jittering
// is used when creating face descriptors. In particular, to get 99.38% on the LFW
// benchmark you need to use the jitter_image() routine to compute the descriptors,
// like so:
matrix<float,0,1> face_descriptor = mean(mat(net(jitter_image(faces[0]))));
cout << "jittered face descriptor for one face: " << trans(face_descriptor) << endl;
// If you use the model without jittering, as we did when clustering the bald guys, it
// gets an accuracy of 99.13% on the LFW benchmark. So jittering makes the whole
// procedure a little more accurate but makes face descriptor calculation slower.
cout << "hit enter to terminate" << endl;
cin.get();
}
catch (std::exception& e)
{
cout << e.what() << endl;
}
// ----------------------------------------------------------------------------------------
std::vector<matrix<rgb_pixel>> jitter_image(
const matrix<rgb_pixel>& img
)
{
// All this function does is make 100 copies of img, all slightly jittered by being
// zoomed, rotated, and translated a little bit differently. They are also randomly
// mirrored left to right.
thread_local dlib::rand rnd;
std::vector<matrix<rgb_pixel>> crops;
for (int i = 0; i < 100; ++i)
crops.push_back(jitter_image(img,rnd));
return crops;
}其中关键点检测shape_predictor_5_face_landmarks.dat模型也可以改成shape_predictor_68_face_landmarks.dat
人脸识别过程中,需要根据预先录入的人脸信息得到人脸关键点数组
std::vector<matrix<rgb_pixel>> faces;
然后得到人脸描述信息数组
std::vector<matrix<float,0,1>> face_descriptors = net(faces);
同样可以以这种形式得到当前人脸的描述信息,然后去数组中匹配最接近的人脸信息
length(face_descriptorsi-face_descriptorsj)
计算人脸描述的差异,值越小标识越接近。
效果展示
人脸检测
