【电机控制】FOC算法验证步骤
文章目录
前言
使用工具:
1.示波器:PICO7
提示:以下是本篇文章正文内容,下面案例可供参考
一、PWM------不接电机
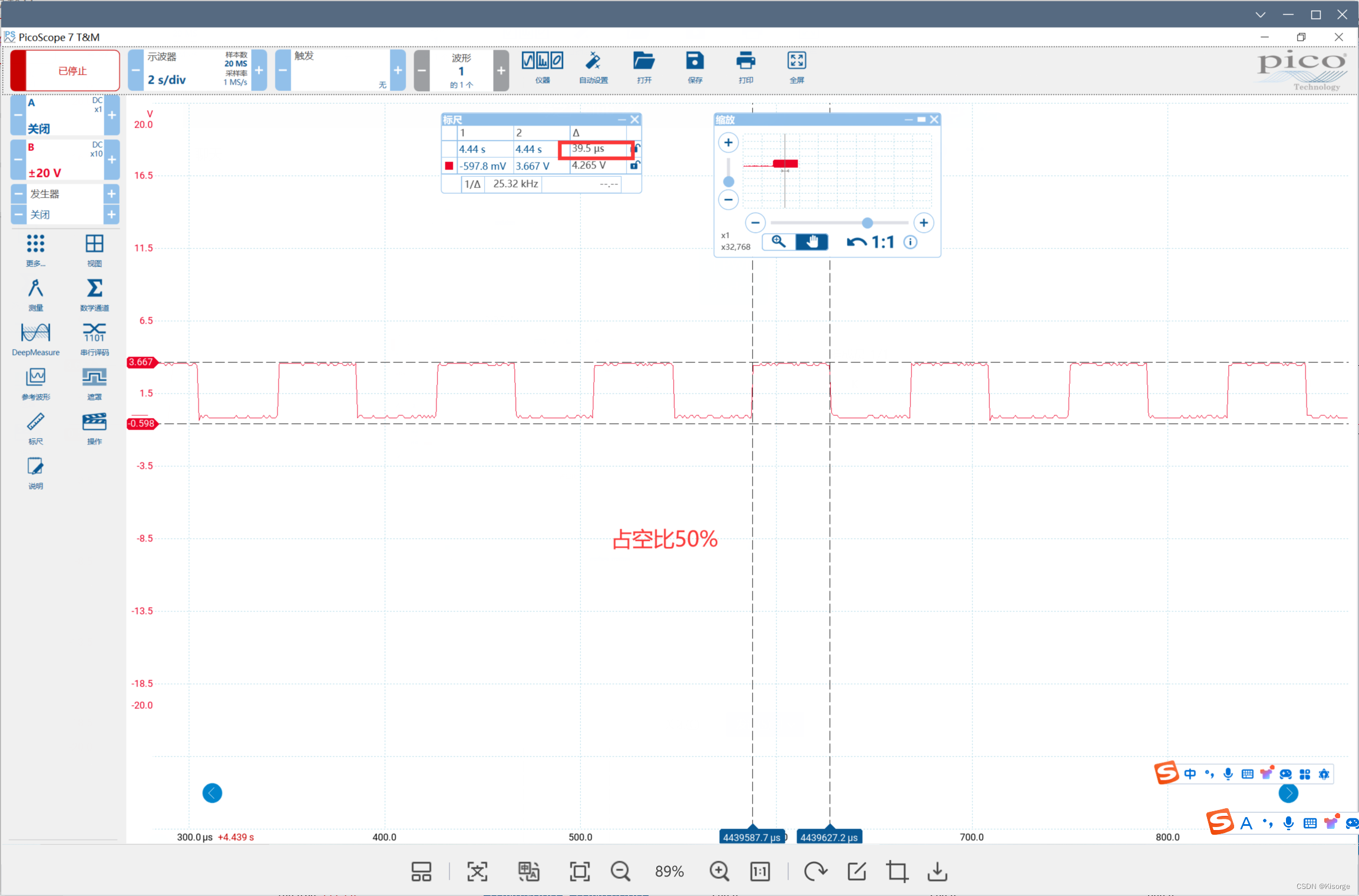
载波频率12.5K
c
#define PWM_Fre 12.5
#define PWM_Perload 72000/(uint32_t)(PWM_Fre*2) //2880分别让寄存器上桥发波50%,25%,0%,下桥互补输出,50%,75%,100%
c
CMPA = 1440; //(0.5+1)*2880/2
CMPB = 720;
CMPC = 0;将寄存器的值串口打印至上位机
同时在仿真器显示

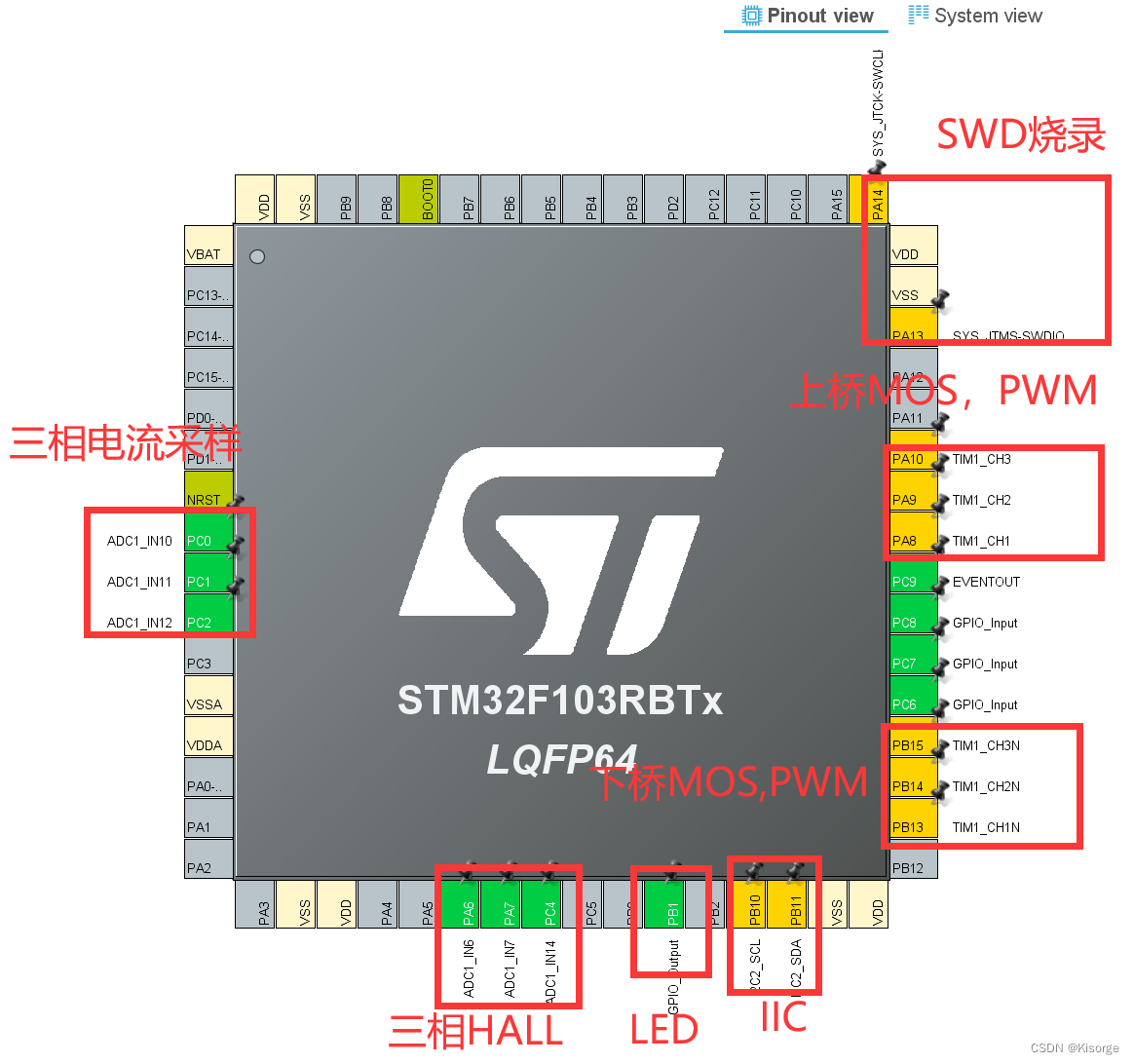
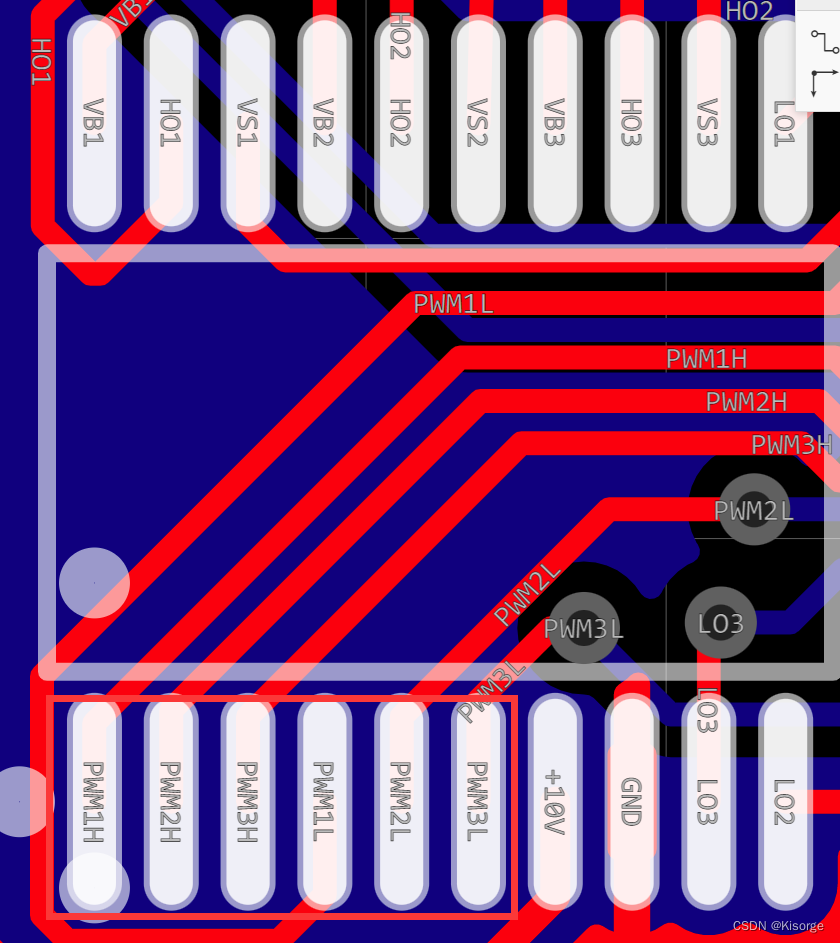
采样点,控制芯片引脚输出至预驱芯片引脚,本次实验采的是驱动器引脚,直接采集控制芯片引脚也可以
1、PWMA-H-50%
2、PWMB-H-25%
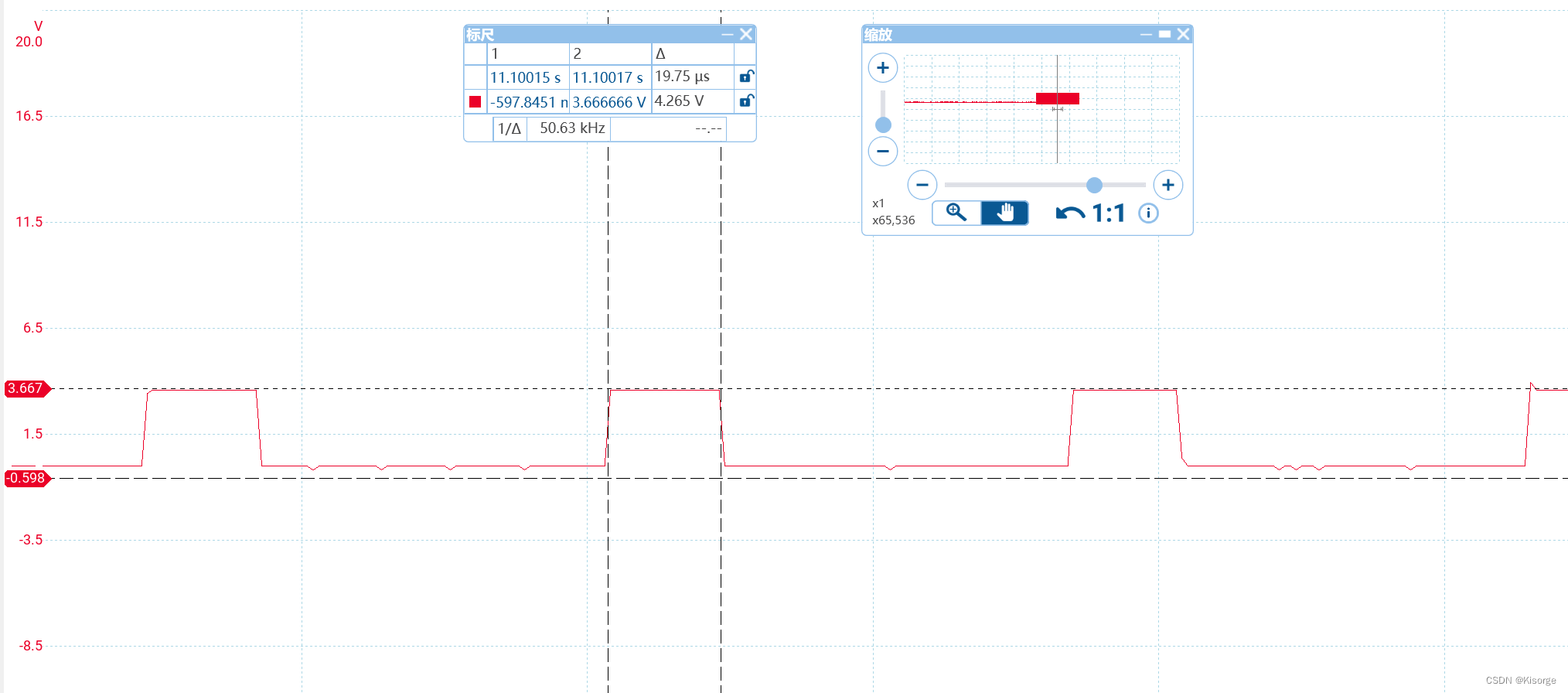
3、PWMC-H-0%
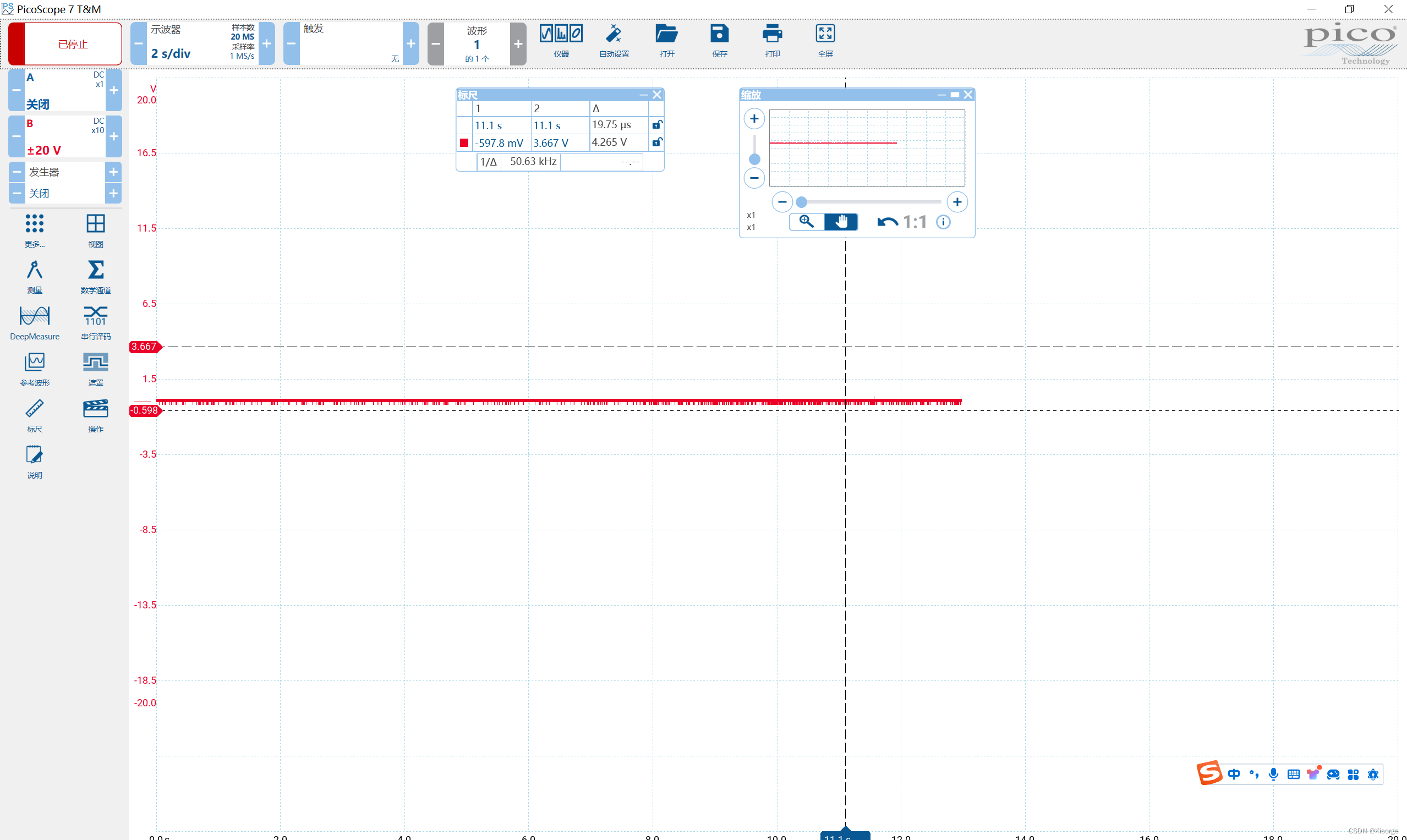
4、PWMA-L-50%
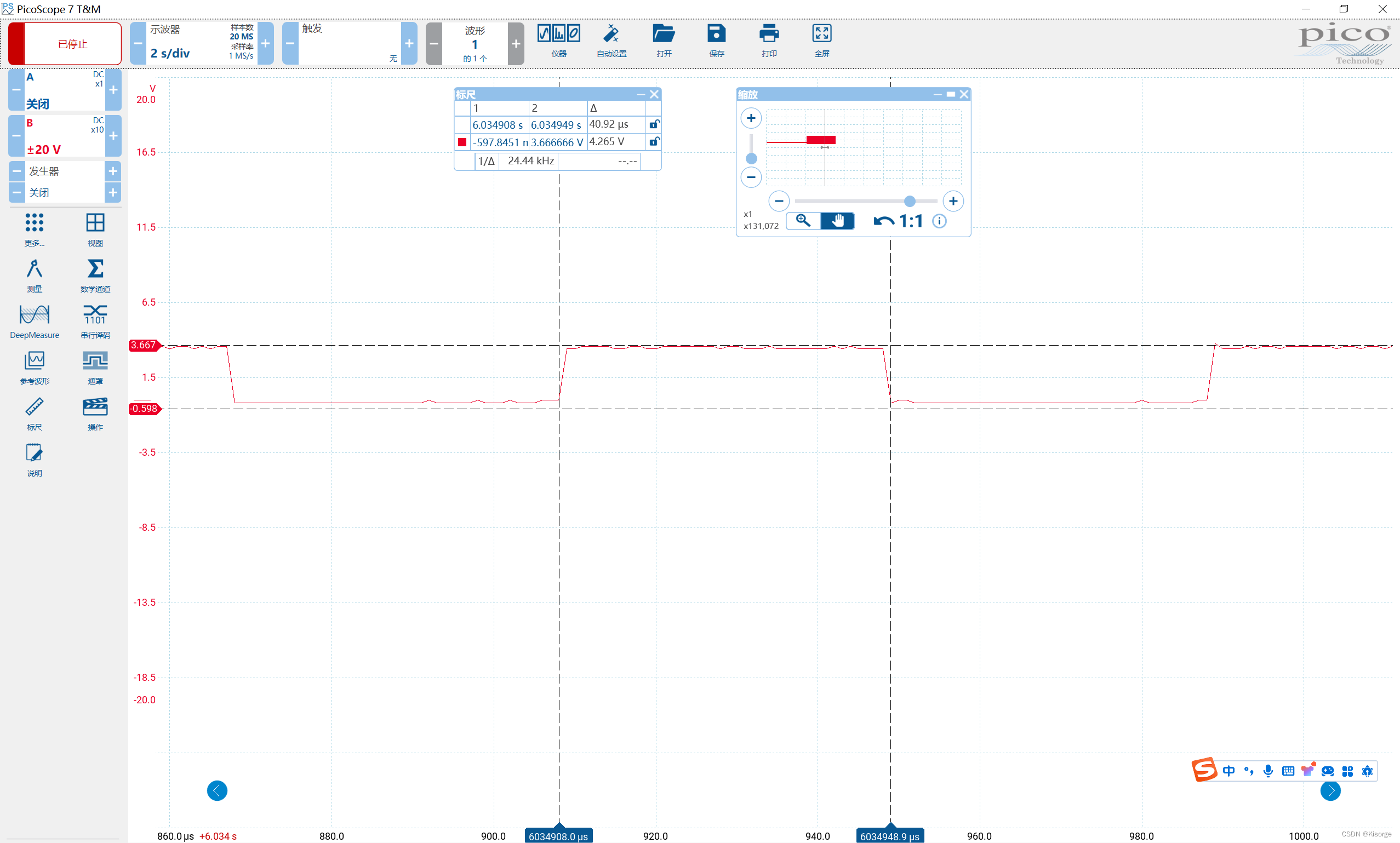
5、PWMB-L-75%
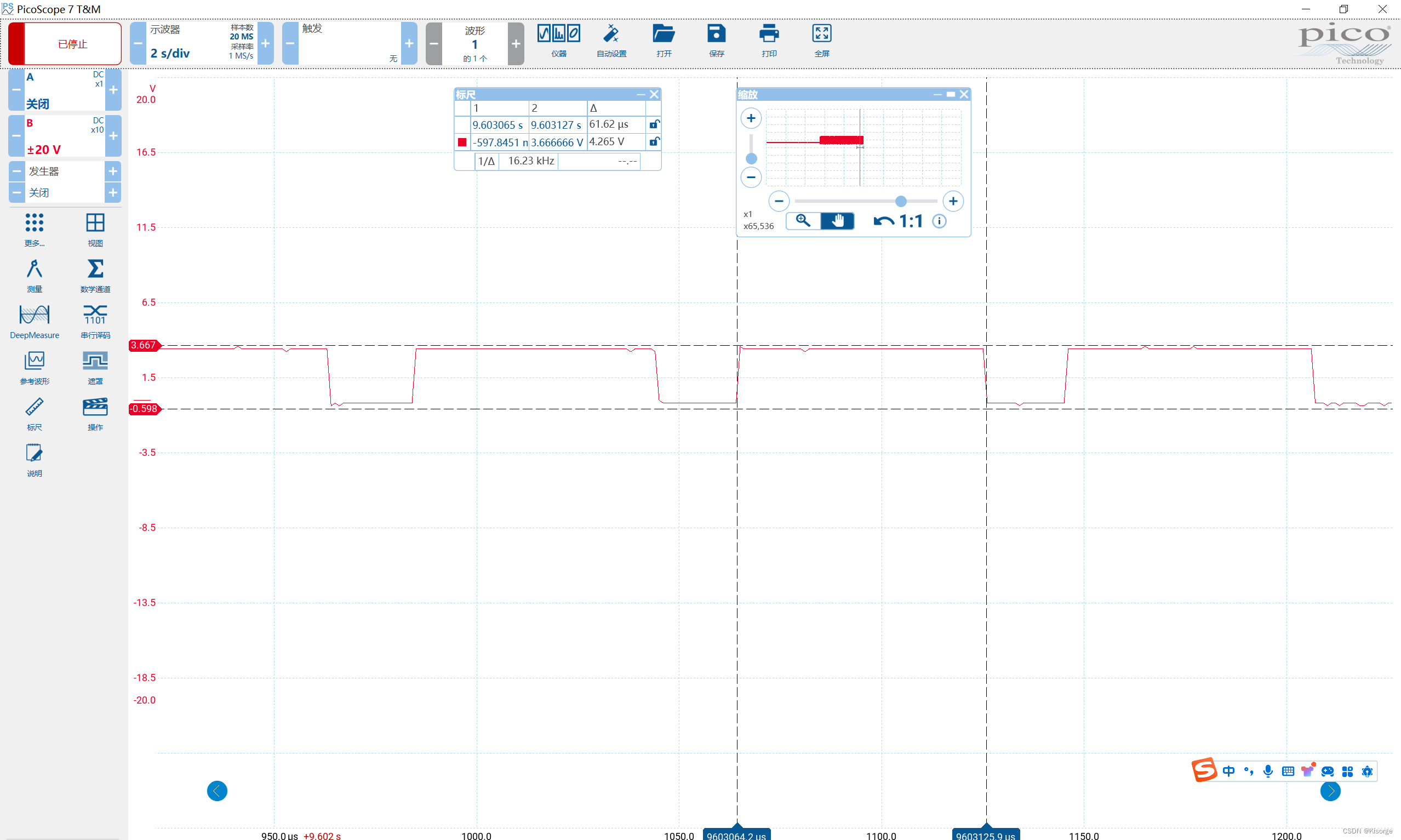
6、PWMC-L-100%
二、ADC------不接电机
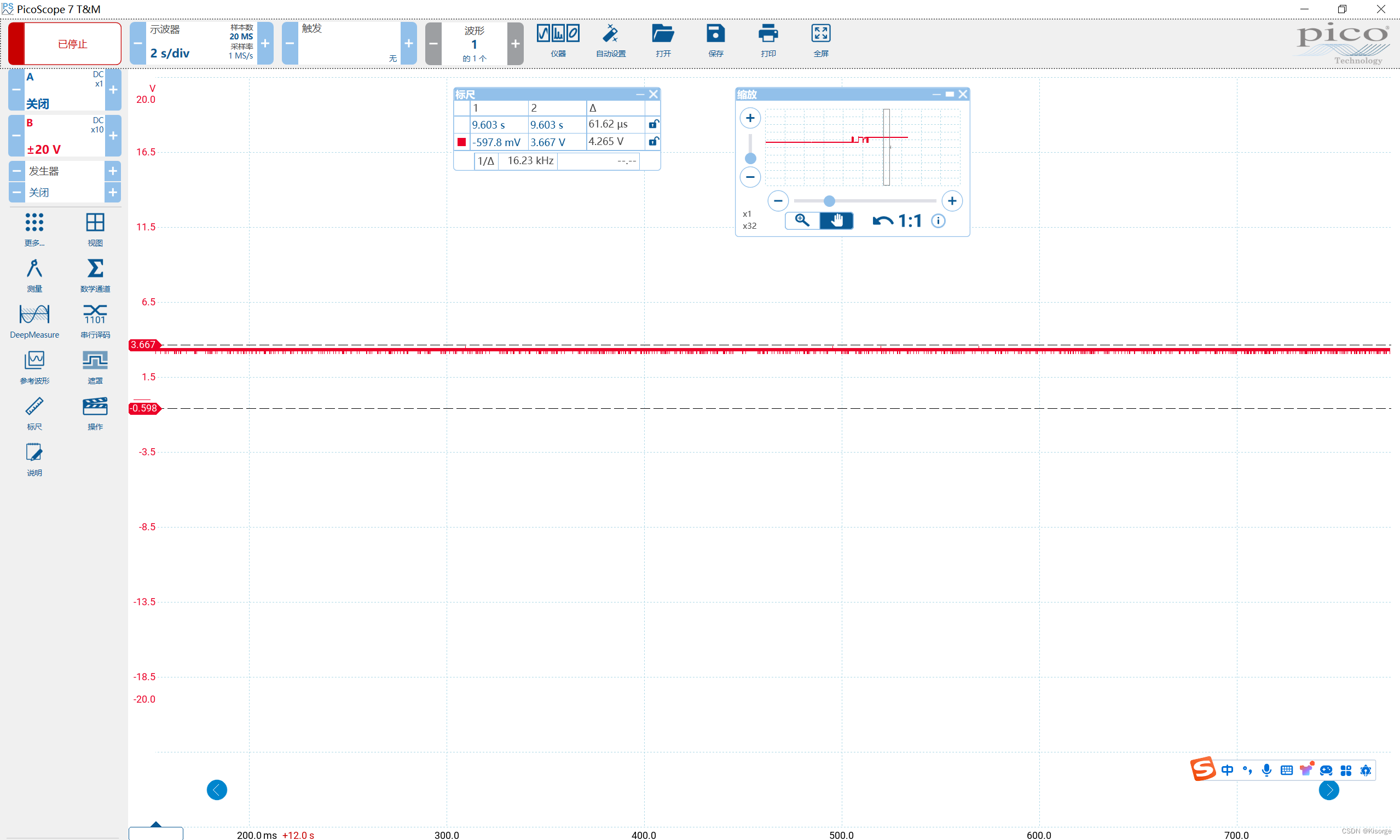
1.电流零点稳定性、ADC读取的OFFSET
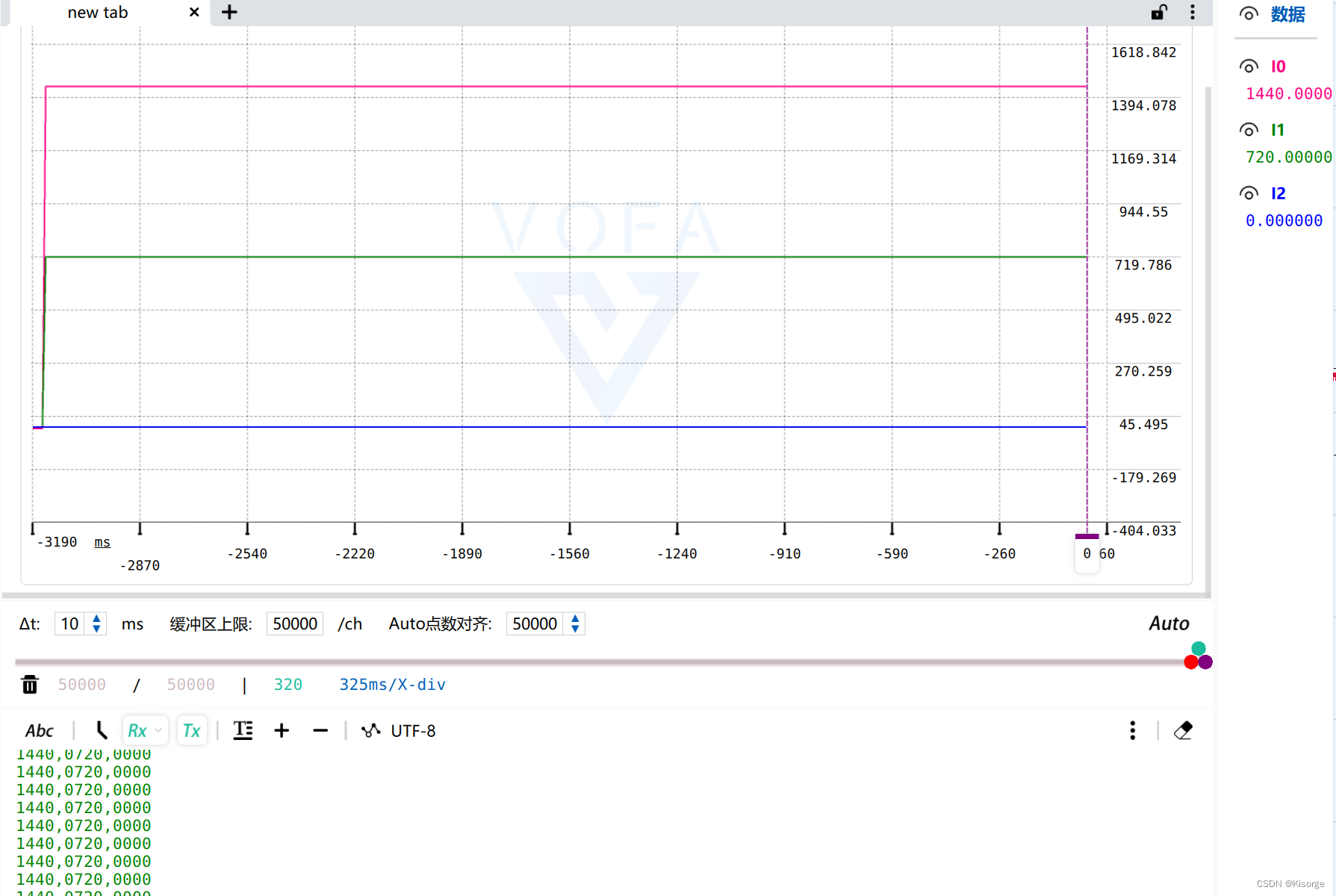
串口打印出AD采样寄存器的值,看是否稳定
c
printf("%.4d,%.4d,%.4d\n", ADC_GetInjectedConversionValue(ADC1, ADC_InjectedChannel_1),ADC_GetInjectedConversionValue(ADC1, ADC_InjectedChannel_2),ADC_GetInjectedConversionValue(ADC1, ADC_InjectedChannel_3));
打印结果
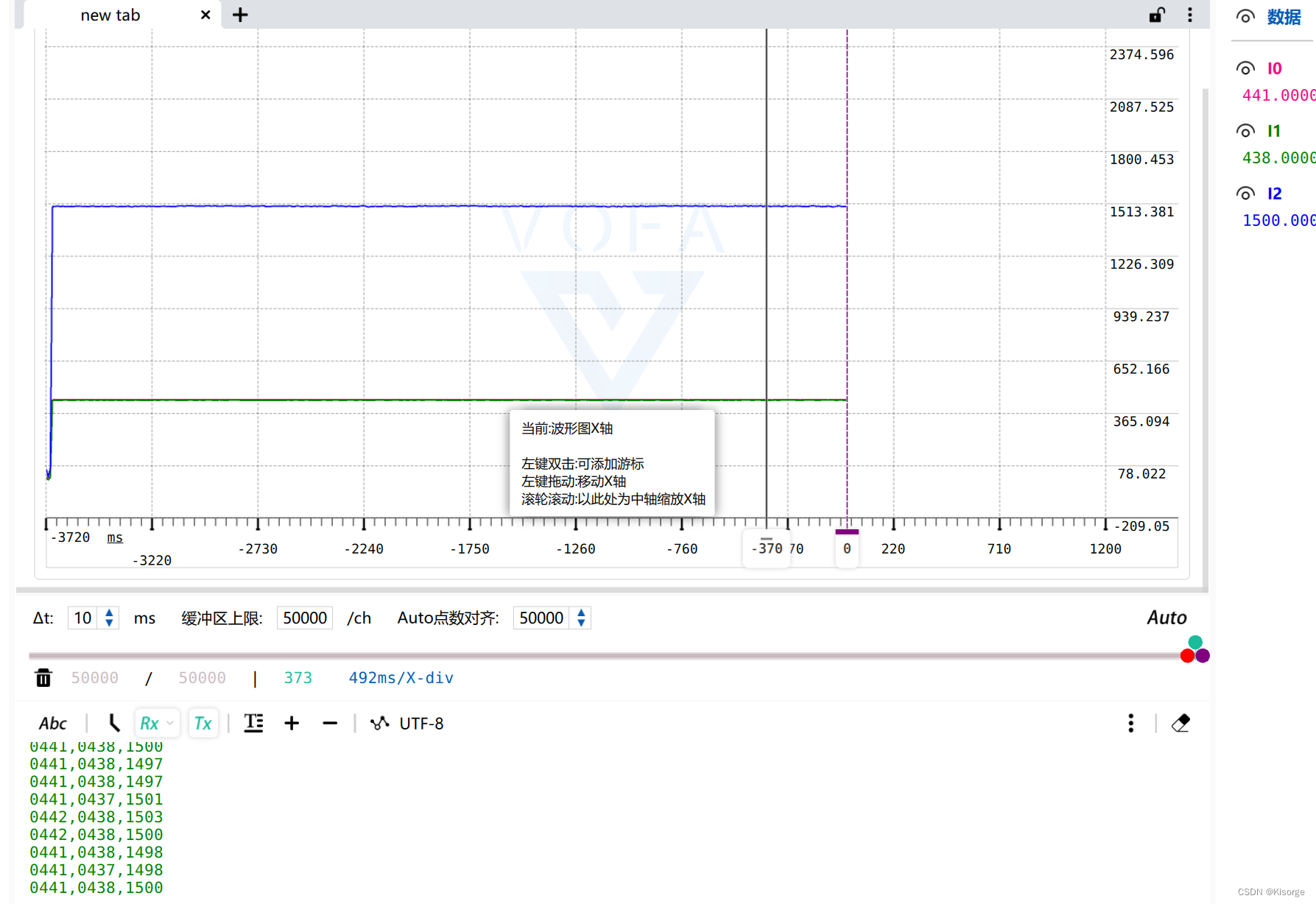
U相V相约有450个ADC值,W相约有1500个ADC值OFFSET
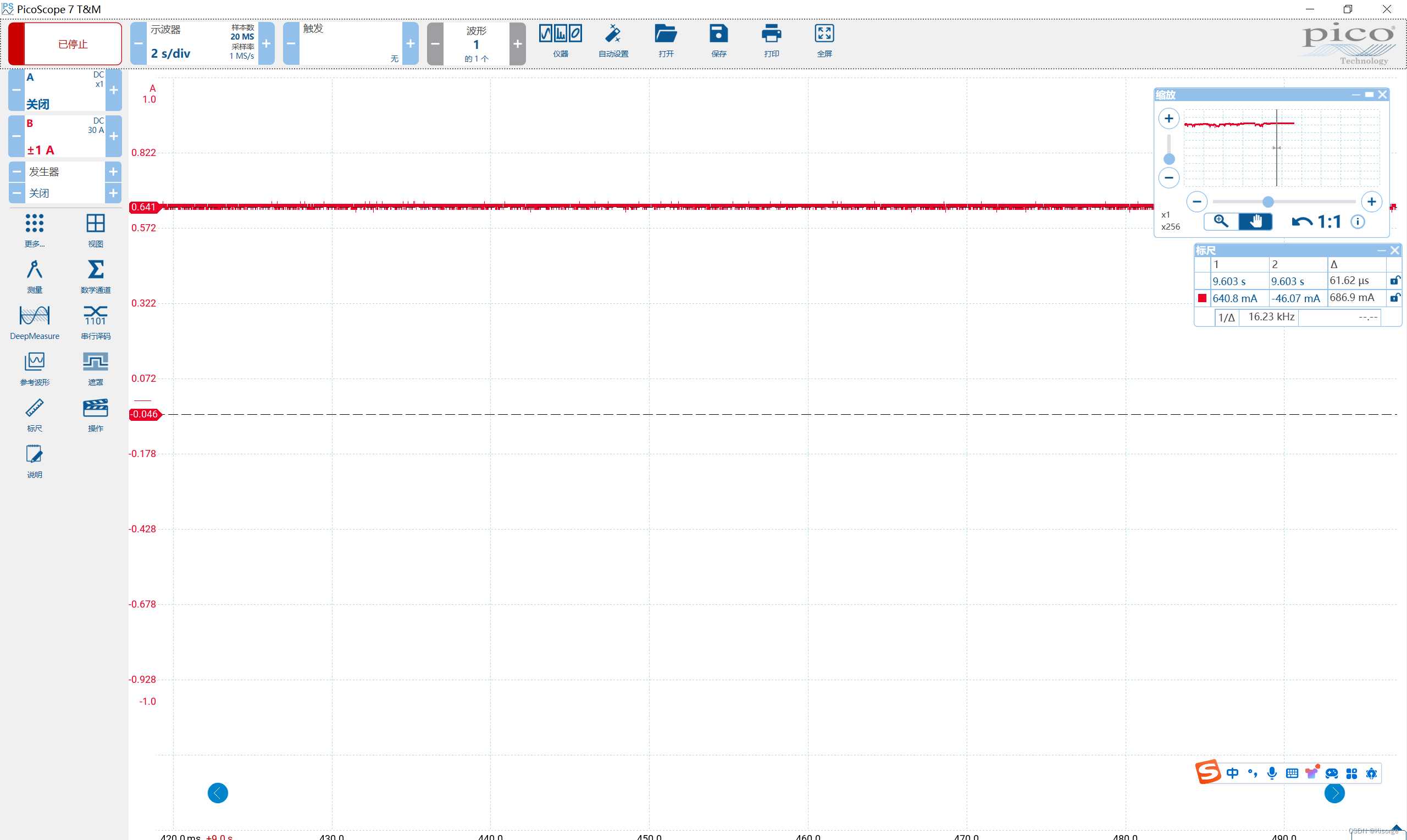
2.电流钳准备
直流稳压电源输出0.6A
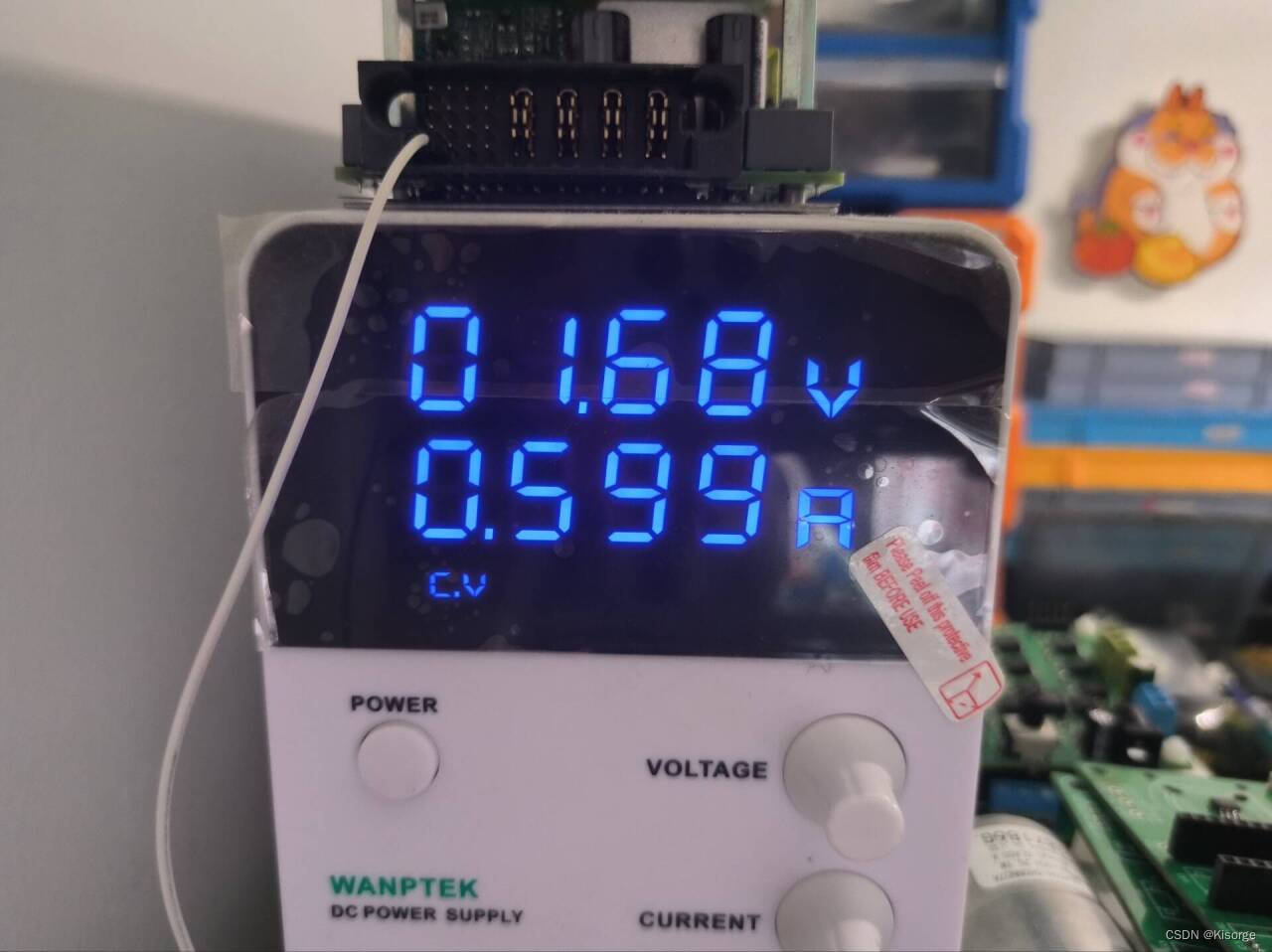
电流钳抓到0.6A左右
3.运放电路分析
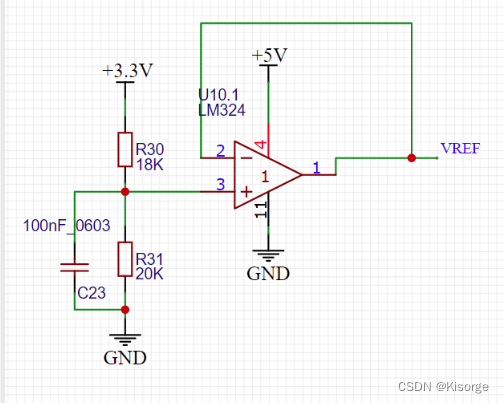
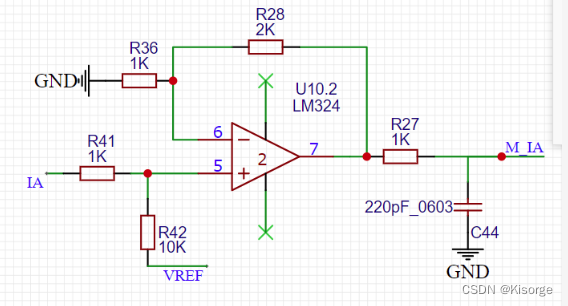
1.电路OFFSET
程序上读取offset值的时候是在初始化阶段,电机处于停止状态,此时的相电流等于0。
(VM_IA -V6)/R28=(V6-VGND)/R36
VM_IA=3×V6
V5=VA×R42/(R41+R42)+VREF×R41/(R41+R42)=0.91VA+0.159
由虚短可得,V5=V6
VM_IA=2.73VA+0.477<=3.3V
下桥几乎没有电流通过时,不带电机测试时,可以测得为0.48V
2.AOP
AOP=Vout/Vin=VM_IA/VA=2.73
3.采样电路的采样值范围
2.73VA+0.477<=3.3V
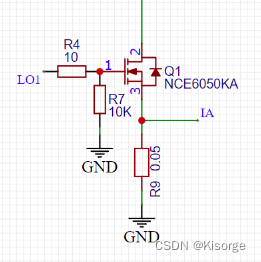
VA<=1.03V,Rshout=0.05Ω
IA=VA/Rshout<=20.6A
相电流最大采集20A
4.相电流与ADC采样值的关系
我们需要计算相电流与ADC采样值的关系,也就是说,通过ADC采样的值,经过数学公式计算,可以计算出来当前相电流为多少,再根据相电流进行FOC变换
IA=7.3×VM_IA-3.5=7.3×VM_IA×3.3/4096-3.5-offset
此时VM_IA为ADC采样值,通过单片机引脚接入
电流=(ADC原始值/4096∗3.3-offset)/采样电阻阻值/运放放大倍数
4.电流极性判断------接电机
c
CMPA = 1440; //50%
CMPB = 288; //10%
CMPC = 288; //10%三、参考文献
运放-同相放大与反相放大
foc学习笔记3------电流环
关于FOC相电流采样电路参数的分析
FOC(电机矢量控制)调试记录
总结
本文仅仅简单介绍了【电机控制】FOC算法验证步骤,评论区欢迎讨论。