一个机器人位于一个 m x n网格的左上角 (起始点在下图中标记为 "Start" )。机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 "Finish" )。问总共有多少条不同的路径?
示例 1:
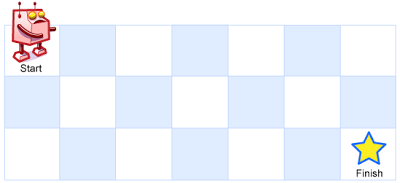
输入:m = 3, n = 7 输出:28
动态规划:
cpp
class Solution {
public:
int uniquePaths(int m, int n) {
//创建一个大小为m的外部向量,每个元素都是一个大小为n的内部向量,内部向量初始化为0。
vector<vector<int>> ret(m,vector<int>(n,0));
//第0行第0列初始化为1
for(int j=0;j<n;j++){ret[0][j]=1;}
for(int i=0;i<m;i++){ret[i][0]=1;}
for(int i=1;i<m;i++){
for(int j=1;j<n;j++){
ret[i][j]=ret[i][j-1]+ret[i-1][j];
}
}
return ret[m-1][n-1];
}
};