接线
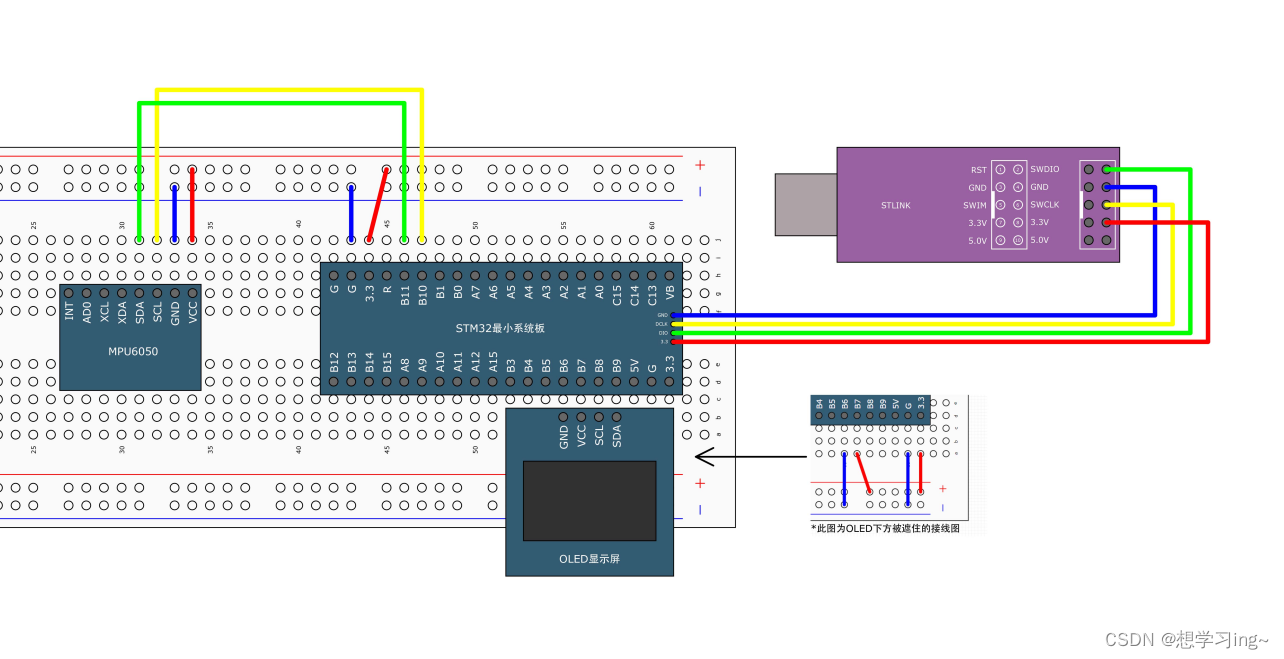
|-----|------|
| SDA | PB11 |
| SCL | PB10 |
I2C
对操作端口的库函数进行封装
void MyI2C_W_SCL(uint8_t BitValue)//写
{
GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue);
Delay_us(10);
}
void MyI2C_W_SDA(uint8_t BitValue)//写
{
GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue);
Delay_us(10);
}
uint8_t MyI2C_R_SDA(void)//读
{
uint8_t BitValue;
BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11);
Delay_us(10);
return BitValue;
}I2C初始化
++第一步:把SCL和SDA都初始化为开漏输出模式++
方法:
1.打开RCC时钟
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState);
作用:外设时钟控制(根据外设连接的总线选择要开启的时钟)
2.配置GPIO,将PB10和PB11配置为开漏输出模式
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
作用:用结构体的参数初始化GPIO。
用法:先定义一个结构体变量,再给变量赋值,最后调用这个函数即可(这个函数就会自动读取结构体的值,然后自动把外设的各个参数配置好)。
++第二步:把SCL和SDA配置为高电平++
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
作用:用于将指定引脚设置为高电平
void MyI2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11);
}I2C起始条件
起始条件:SCL高电平期间,SDA从高电平切换到低电平

配置方法:先拉高SDA,再拉高SCL,然后拉低SDA,最后拉低SCL。
void MyI2C_Start(void)
{
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
MyI2C_W_SDA(0);
MyI2C_W_SCL(0);
}I2C终止条件
起始条件:SCL高电平期间,SDA从低电平切换到高电平

配置方法:先拉低SDA,再释放SCL,再释放SDA.
void MyI2C_Stop(void)
{
MyI2C_W_SDA(0);
MyI2C_W_SCL(1);
MyI2C_W_SDA(1);
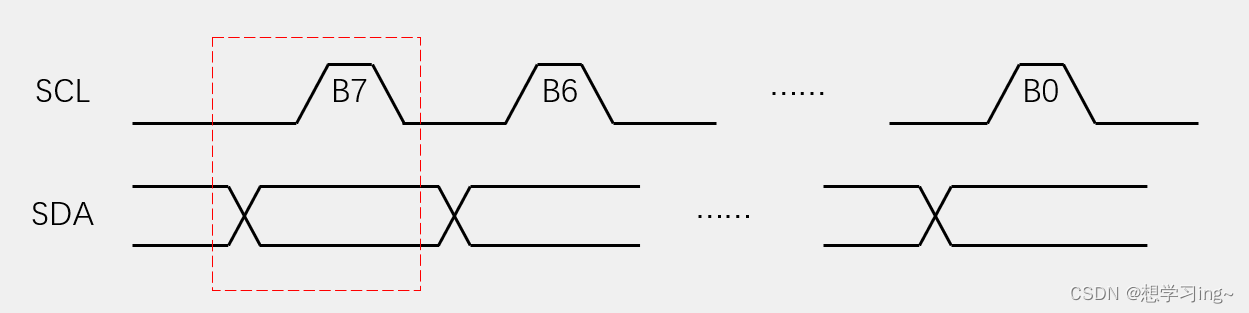
}I2C发送字节
条件:SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节
void MyI2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i ++)
{
MyI2C_W_SDA(Byte & (0x80 >> i));
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}
}小tips:利用按位与的方式取出数据的某一位或某几位
I2C接收字节
条件:SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)

uint8_t MyI2C_ReceiveByte(void)
{
uint8_t i, Byte = 0x00;
MyI2C_W_SDA(1);
for (i = 0; i < 8; i ++)
{
MyI2C_W_SCL(1);
if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);}
MyI2C_W_SCL(0);
}
return Byte;
}I2C发送应答
条件:主机在接收完一个字节之后,在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答

void MyI2C_SendAck(uint8_t AckBit)
{
MyI2C_W_SDA(AckBit);
MyI2C_W_SCL(1);
MyI2C_W_SCL(0);
}I2C接收应答
条件:主机在发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)

uint8_t MyI2C_ReceiveAck(void)
{
uint8_t AckBit;
MyI2C_W_SDA(1);
MyI2C_W_SCL(1);
AckBit = MyI2C_R_SDA();
MyI2C_W_SCL(0);
return AckBit;
}MPU6050
MPU6050写指令
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_SendByte(Data);
MyI2C_ReceiveAck();
MyI2C_Stop();
}MPU6050读指令
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS);
MyI2C_ReceiveAck();
MyI2C_SendByte(RegAddress);
MyI2C_ReceiveAck();
MyI2C_Start();
MyI2C_SendByte(MPU6050_ADDRESS | 0x01);
MyI2C_ReceiveAck();
Data = MyI2C_ReceiveByte();
MyI2C_SendAck(1);
MyI2C_Stop();
return Data;
}MPU6050初始化
void MPU6050_Init(void)
{
MyI2C_Init();
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);
}MPU6050得到ID号
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}MPU6050得到数据
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);
*AccX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);
*AccY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);
*AccZ = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);
*GyroX = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);
*GyroY = (DataH << 8) | DataL;
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);
*GyroZ = (DataH << 8) | DataL;
}例题
读取MPU6050六个轴的数据
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
int main(void)
{
OLED_Init();
MPU6050_Init();
OLED_ShowString(1, 1, "ID:");
ID = MPU6050_GetID();
OLED_ShowHexNum(1, 4, ID, 2);
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);
OLED_ShowSignedNum(2, 1, AX, 5);
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}有什么不懂的可以私信我哦