文章目录
前言
一个学习STM32的小白~ 有错误评论区或私信指出提示:以下是本篇文章正文内容,下面案例可供参考
一、PWM
1.工作原理
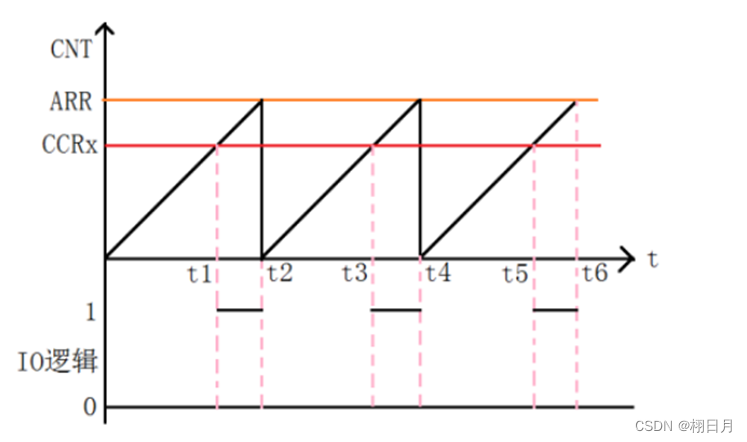
以向上计数为例,讲述PWM原理:
- ①在PWM输出模式下除了CNT(计数器当前值),ARR(自动重装载值),CCRx(捕获/比较寄存器值)。
- ②当CNT小于CCRx时,TIMxCHx通道输出低电平
- ③当CNT等于或大于CCRx时,TIMxCHx通道输出高电平
所谓脉宽调制信号(PWM波),就是一个TIMx_ARR自动重装载寄存器确定频率(由它决定PWM周
期),TIM_CCRx寄存器确定占空比信号。
2.内部运作机制
CCR1:设置捕获比较寄存器,设置比较值。
CCMR1寄存区:设置PWM模式1或者PWM模式2。
CCER:P位:输出/捕获:设置极性:0高电平有效,1低电平有效
E位:输出/捕获:使能端口

3. PWM工作模式
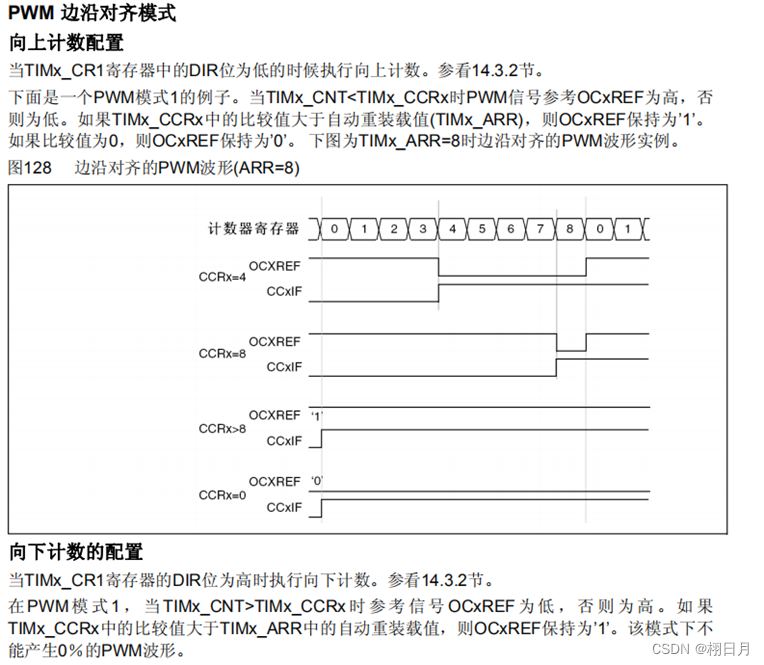
模式一:边沿对齐模式
向上计数时:当TIMx CNT<TIMx_CCRx时通道1为有效电平,否则为无效电平;
向下计数时:一旦TIMx CNT>TIMx CCRx,CCR1通道1为无效电平,否则为有效电平。
模式二:中央对齐模式
向上计数时:当TIMx CNT<TIMx_CCRx时通道1为无效电平,否则为有效电平;
向下计数时:一旦TIMx CNT>TIMx CCRx,CCR1通道1为有效电平,否则为无效电平。

4.PWM结构体及库函数
c
typedef struct
{
uint16 t TIM OCMode; //配置PWM模式1还是模式2
uint16 tTIM OutputState: /配置输出使能/OR失能
uint16 tTIM OutputNState
uint16 tTIMPulse: //配置比较值,CCRx
uint16 t TIM OCPolarity; //比较输出极性
uint16 t TIM OCNPolarity;
uint16 tTIM OCldleState;
uint16 tTIM OCNIdleState:
}
TIM OCInitTypeDef;
c
void TIM_OCxlnit I/结构体初始化
(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OClnitStruct); void TIM_SetCompare1 //设置比较值函数
(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM OC1PreloadConfig //使能输入比较预装载
(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM Cmd //开启定时器
(TIM_TypeDef* TIMx, FunctionalState NewState)
void TIM ARRPreloadConfig //使能自动重装载的预装载寄存器允许位(TIM TypeDef* TIMx, FunctionalState NewState);
void TIM_OC1PolarityConfig //配置修改极性
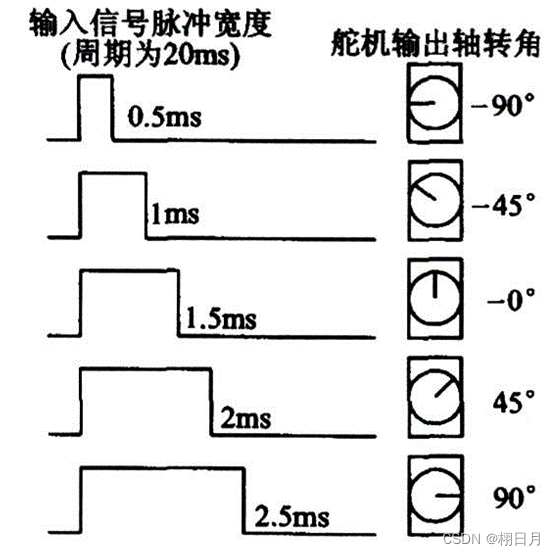
(TIM TypeDef* TIMx, uint16 tTIM_OCPolarity);二、PWM控制舵机
TIM3 PWM输出 驱动SG90电机配置过程:
1.打开时钟--->GPIO时钟,TIM定时器时钟,部分重映射时钟
2.GPIO结构体
3.配置通用定时器结构体
4.配置定时去输出PWM结构体
5.配置PWM比较值

c
//定时器输出PWM配置
#include "motor.h"
#include "stm32f10x.h" // Device header
void motor_config(void)
{
GPIO_InitTypeDef motor_GPIOinitStructure;
TIM_TimeBaseInitTypeDef motor_TimeBaseinitStructure;
TIM_OCInitTypeDef motor_OCinitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);
motor_GPIOinitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
motor_GPIOinitStructure.GPIO_Pin = GPIO_Pin_5;
motor_GPIOinitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&motor_GPIOinitStructure);
motor_TimeBaseinitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
motor_TimeBaseinitStructure.TIM_CounterMode = TIM_CounterMode_Up;
motor_TimeBaseinitStructure.TIM_Period = 200-1;
motor_TimeBaseinitStructure.TIM_Prescaler = 7200-1;
TIM_TimeBaseInit(TIM3,&motor_TimeBaseinitStructure);
//输出PWM通道配置
motor_OCinitStructure.TIM_OCMode = TIM_OCMode_PWM1;//PWM模式1边沿检查
motor_OCinitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;//输出极性
motor_OCinitStructure.TIM_OutputState = TIM_OutputState_Enable;//输出使能
TIM_OC2Init(TIM3,&motor_OCinitStructure);
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能比较值预装载
TIM_Cmd(TIM3,ENABLE);
}
c
//主函数通过输出比较输出PWM波控制舵机
#include "stm32f10x.h"
#include "main.h"
#include "motor.h"
void delay_ms(uint32_t xms)
{
while(xms--)
{
int i = 12000;
while(i--);
}
}
int main()
{
motor_config();
while(1)
{
for(int i = 195 ; i>=175 ; i = i-5)
{
TIM_SetCompare2(TIM3,i);
delay_ms(500);
}
}
}