文章目录
- [第11章 基于概率图模型的图像分析](#第11章 基于概率图模型的图像分析)
- [第12章 运动分析](#第12章 运动分析)
- [第13章 目标跟踪](#第13章 目标跟踪)
第11章 基于概率图模型的图像分析

概率有向图模型


因子分解


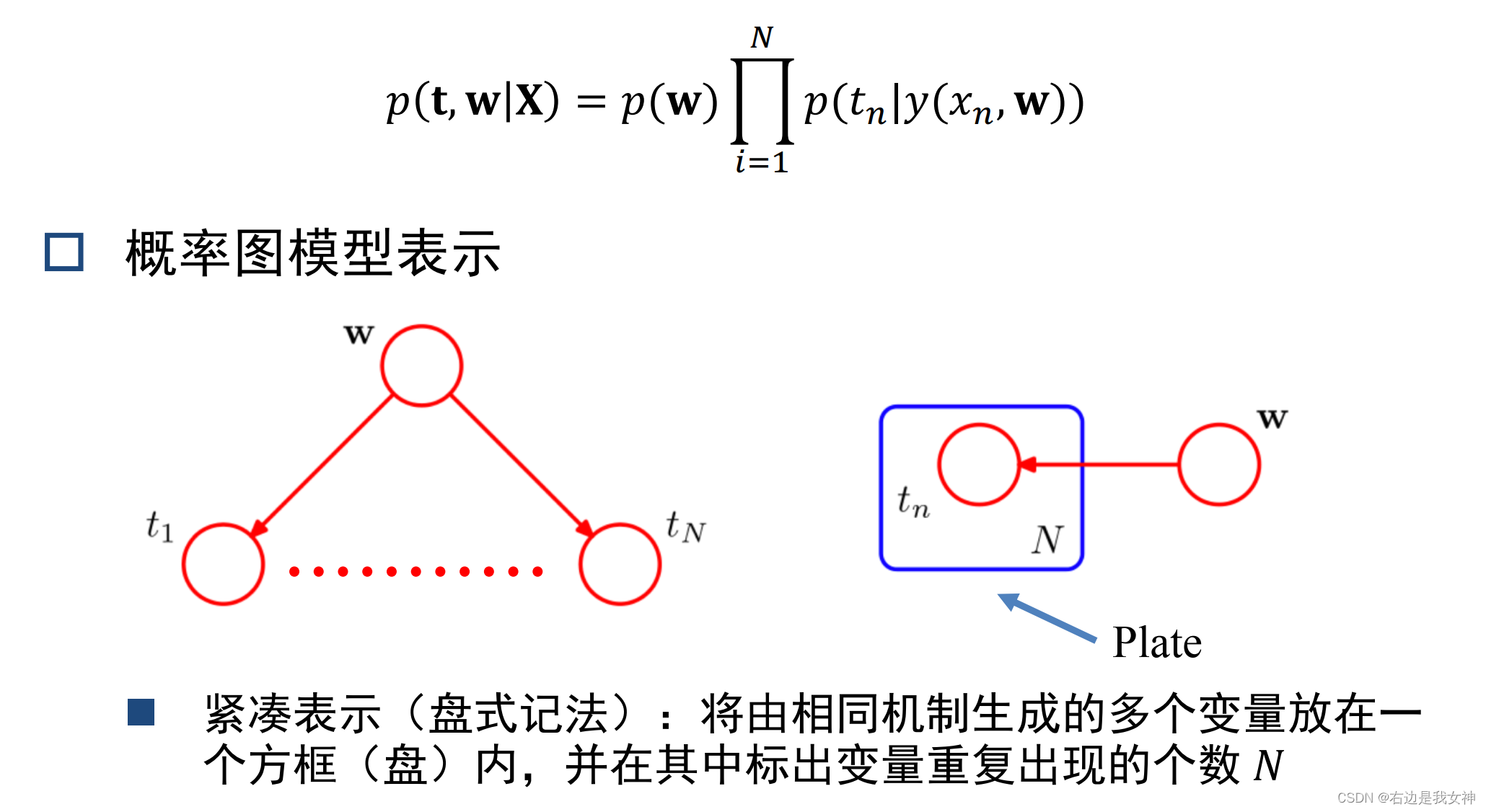
生成式模型

链式图

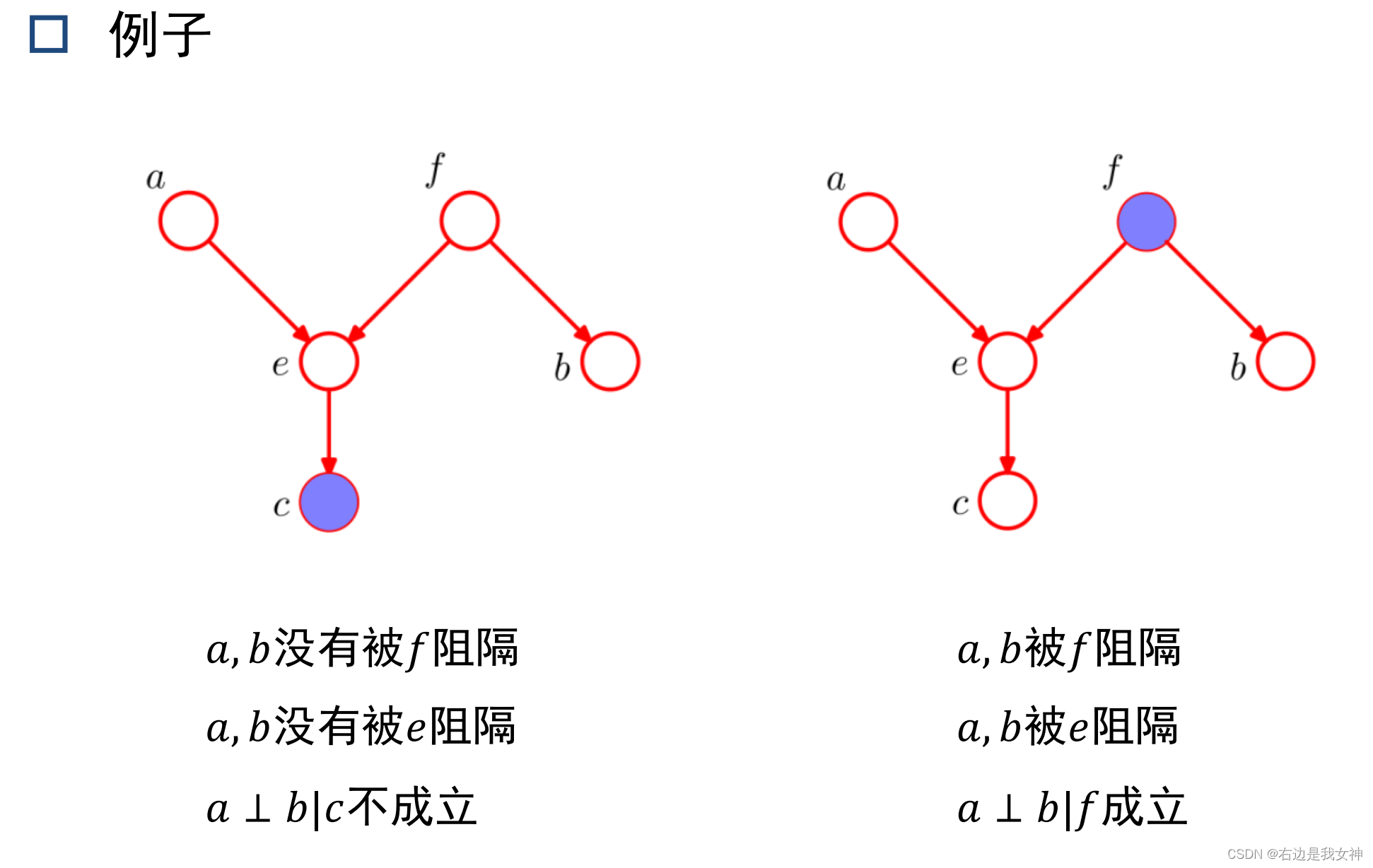
条件独立性



有向图模型的马尔科夫毯

概率无向图模型

模型定义





概率无向图模型的因子分解




条件随机场
条件随机场的定义







每个位置有K_1个转移特征, 有K_2个状态特征. 共有(K_1+K_2)*位置数个项求和.
条件随机场的预测算法






第12章 运动分析
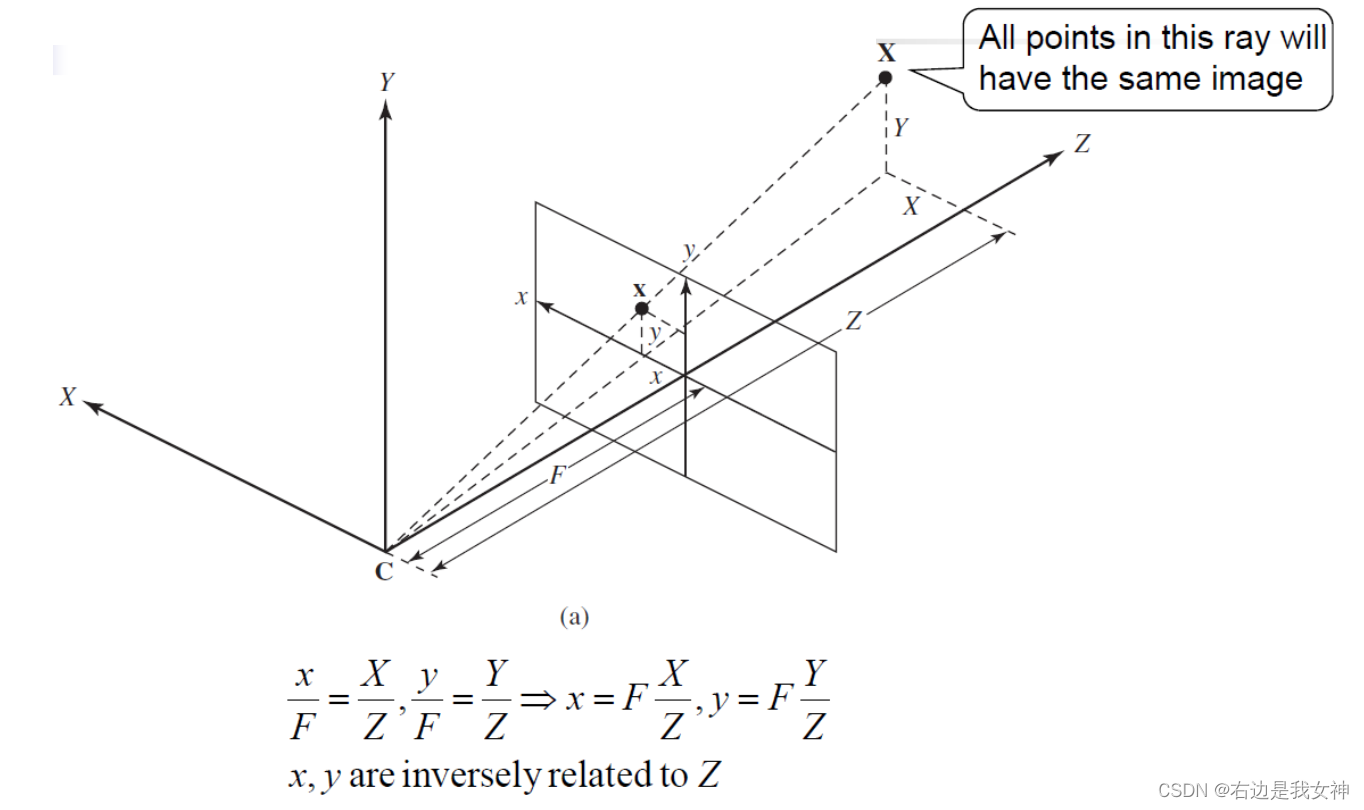
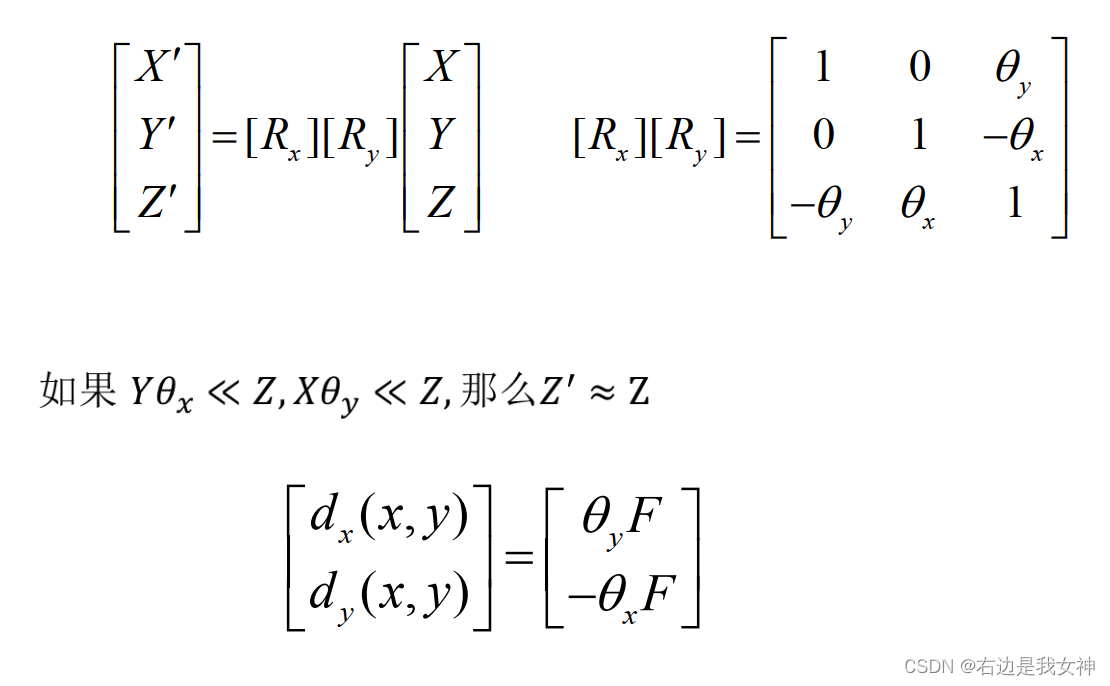
运动相机建模







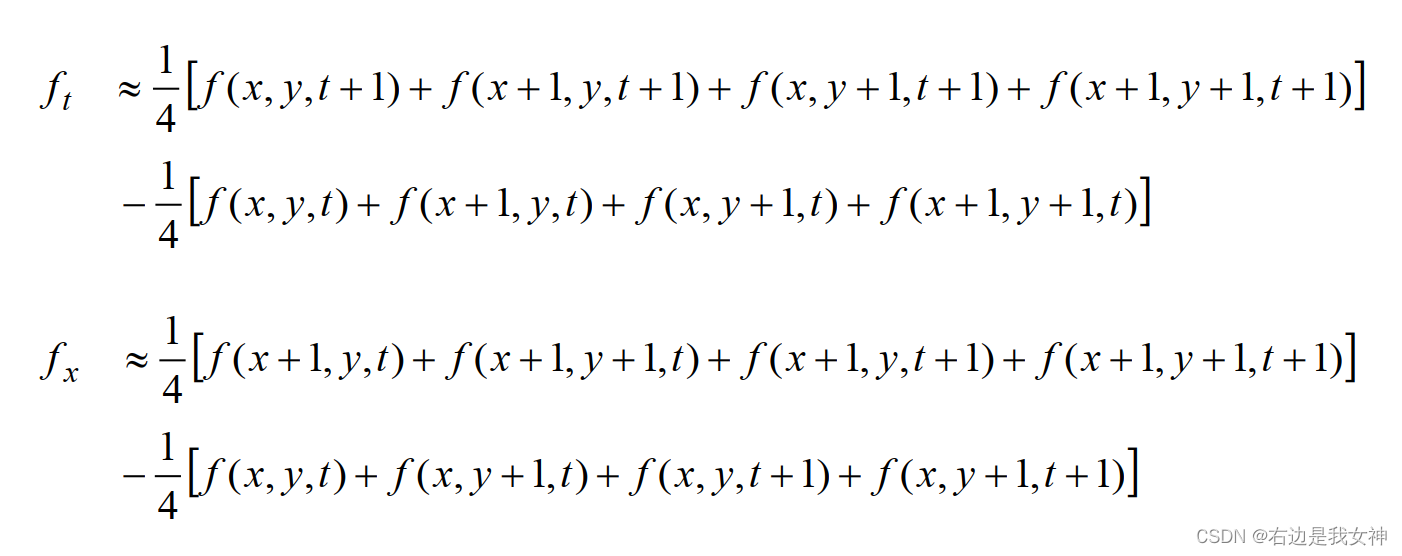
光流

光流估计: 物体的亮度在连续帧之间保持不变, 即尽管物体的位置在变, 但其外观不变.


运动表达方法

运动估计准则


穷举块匹配算法

找一个方向使得锚图中的像素和目标图中的像素差异要最小.
对于候选区域的每一个块, 计算像素之间的距离, 选择距离最小的块对应的方向.




层级块匹配算法
基本原理是, 在不同图像分辨率层次上进行块匹配. 每个层级上的运动估计结果作为下一个层级的初始估计.

金字塔顶层的图像尺寸小, 可以快速进行全局搜索, 捕捉大的运动. 下一层中, 运动矢量在小范围进行搜索.
第13章 目标跟踪
单目标跟踪
卡尔曼滤波

粒子滤波跟踪算法
用一组随机样本来表示一个概率分布. 整个粒子集合代表了对系统状态的完整概率描述.
均值漂移算法
利用概率密度的梯度爬升来寻找局部最优.