一、背景
预制舱变电站高压室由于空间狭小、设备紧凑,传统的巡检方式往往需要人工进入高压室进行巡检,不仅存在安全风险,而且巡检效率低下,难以满足日益增长的电力设备运维需求。
二、预制舱高压室巡检机器人系统
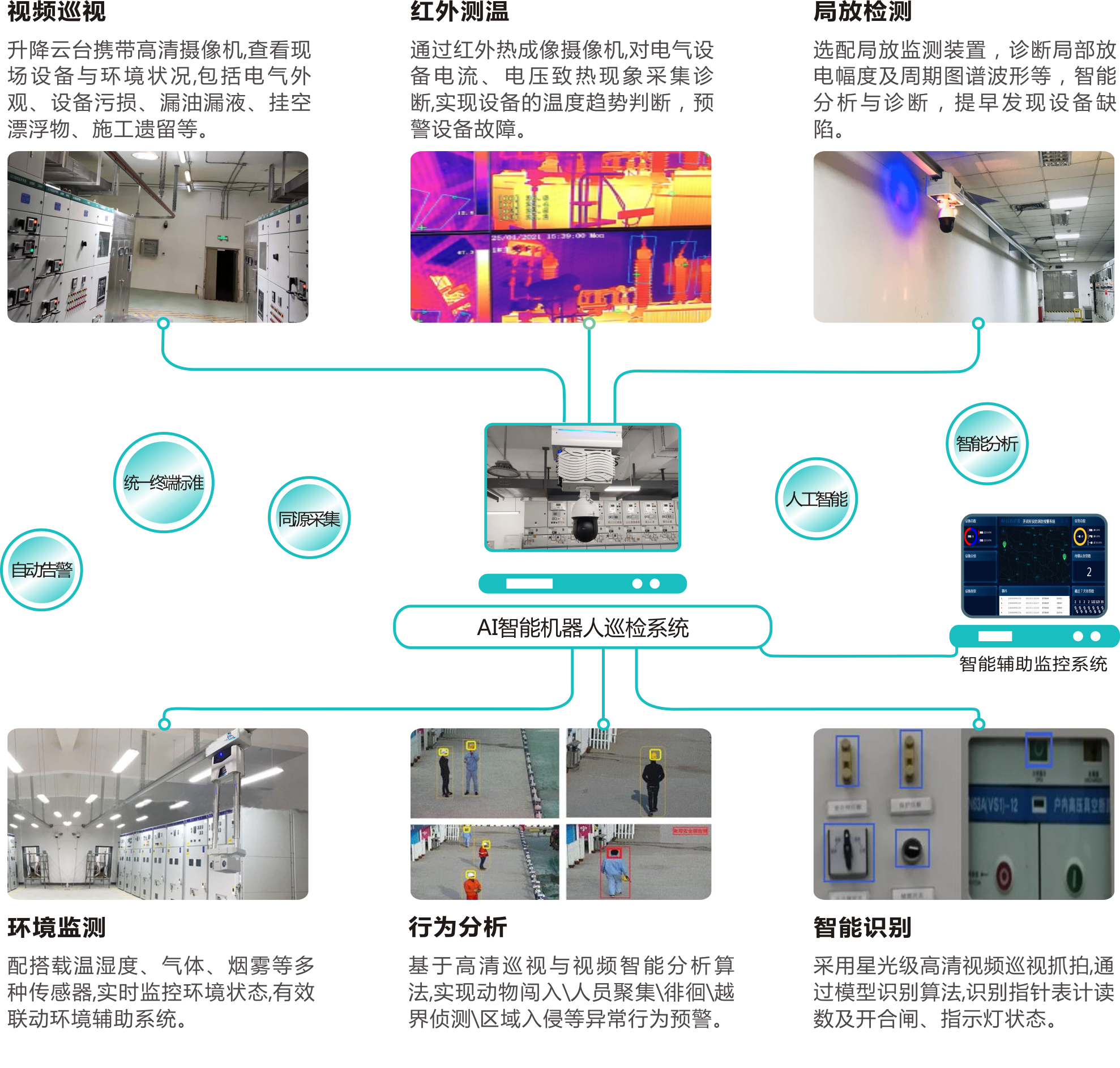
预制舱高压室巡检机器人系统以轨道机器人为硬件平台,搭载可见光云台摄像机、红外热像仪、超声、局放、气体、温湿度以及声音等传感器,集成移动与升降运行控制系统、数据采集和通信模块,整合多传感器融合技术、模式识别及视频分析技术,实现对变配电站所室内设备与环境的全方位感知、全自主智能巡检、全自动异常预警和智能化生产管理。
三、技术特点
主要应用于配电室、开关室等室内场景的内部电力设备及其周边环境实现自主化无人巡检。
机器人搭载可见光、红外、局放,具备表计识别、红外测温及报警、局放检测、报表生成等功能。
1、机器人配备可见光摄像机,能对指示灯、开关分合状态及仪表指示等进行采集并将视频实时上传至本地监控系统。
2、机器人配备在线式红外热成像仪,能对室内的电力设备的温度进行采集,并能将红外视频及温度数据实时传输至本地监控系统,红外影像能实时显示影像中温度最高点位置;
3、局部放电检测采用地电波+超声波检测方式,监测开关柜内部绝缘性能;
4、机器人具有前进、后退、下降三个方向的障碍物检测功能,在行走过程中如遇到障碍物可及时停止,障碍物移除后即可恢复行走;
6、机器人供电方式稳定、可靠,采用滑触线供电或轨道取电方式供电,可实现7*24小时巡检,并支持例行巡检、定点巡检、定制巡检;
7、升降功能机器人升降高度不小于1.3m,升降定位精度不大于±5mm;
8、云台具备多自由度旋转功能,视觉伺服等提高拍摄准确性的功能,能根据设备位置校正云台进行二次对焦确保识别的准确性
四、巡检机器人技术参数
|--------|---------------------------|-------------------------------|-------------------|
| 类别 | 项目名称 | 标准配置 | 可选配置 |
| 机器人本体 | 外形尺寸 | 长37cm×宽25cm×高24cm | |
| 本体重量 | 10kg | | |
| 控制系统 | 嵌入式低功耗高性能 DSP 系统 | | |
| 运行载重 | 45KG | | |
| 作业环境 | -15°C~+55°C / ≤90% | | |
| 电压/功率 | DC36V~48V/300~500W | | |
| 运动性能 | 行走速度 | 0.5~1m/s | |
| 定位精度 | ≤±2mm | | |
| 升降行程 | 2m (1~2m可调) | | |
| 升降速度 | 0.06 m/s | | |
| 安全防护 | 前方异物感知雷达(双向),探测距离 0-150cm | | |
| 云台旋转范围 | 水平 360°连续转动,垂直±180° | | |
| 转弯半径 | ≥300mm | | |
| 巡检轨迹 | 曲线/直线 | | |
| 供电系统 | 供电方式 | 滑触线接触供电 | |
| 续航里程 | 7*24小时 | | |
| 通信模块 | 通讯方式 | PLC滑触线电力载波 | |
| 通信带宽 | 100Mbps | | |
| 运行轨道 | 外形尺寸 | 十字型 长300cm×宽6.0cm×高6.2cm | |
| 轨道重量 | 1.3KG/m(3m/节) | | |
| 轨道材质 | 标准合金铝 表面银白氧化处理 | | |
| 轨道承重 | 100KG/m | | |
| 功能模块 | 视频巡视 | 200W高清相机(1080P) | 400W像素/1080P/自动聚焦 |
| 行为分析 | / | 动物闯入,人员聚集、徘徊、越界侦测、区域入侵 | |
| 表计识别 | / | 指针,压板,指示灯,开合闸 | |
| 红外测温 | / | 红外热成像双目 分辨率384x288, ±0.20 | |
| 环境监测 | / | 温度-40°C +80°C, 湿度0.1~99.9%RH | |
| 局放检测 | / | 超声波+地电波(TEV)+特高频 | |
| 气体检测 | / | CH4、H2S、SF6等 | |
五、应用案例
应用案例:某地市供电公司配电室智能机器人巡检。
针对配电室运维方式采用传统的人工方式进行定期巡检,会存在一定的巡检盲区,现在通过部署智能巡检机器人系统,运维班组人员通过手机或电脑就可以全面监测配电室设备运行状况,不留死角。
智能巡检机器人具备高清视频采集器、红外成像仪等前端硬件采集设备以及后台识别分析软件,能够实现设备状态、装置信号等运行状况信息的实时采集与智能分析,还能监测温度、湿度等环境质量因素。智能巡检机器人系统的投入运行有效减轻了该公司运行维护人员的工作精确度,并提升了工作效率。
智能巡检机器人系统是实现"智能电网"的重要硬件和技术支撑,能够显著提升配电运检自动化和智能化水平。下一阶段,该地市公司将稳步推进智能巡检系统建设,努力实现巡检工作的规范化、智能化、信息化、数据化。
现场图片

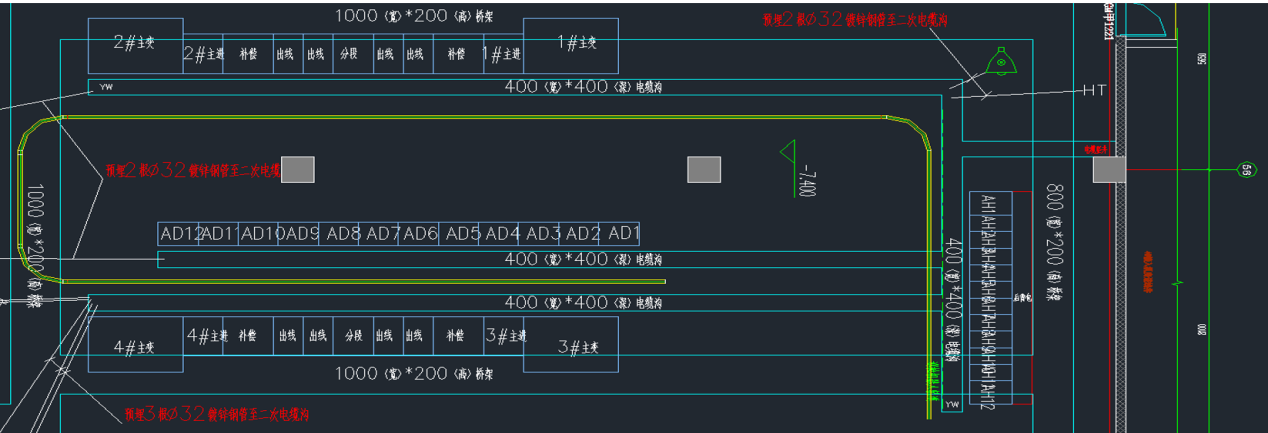
轨道规划图(个站)
六、应用结果与评价
- 实用性及有效性
应用结果表明,该巡检机器人系统具有较高的实用性和有效性,可以满足变电站设备的智能运维需求。
- 提高巡检质量与效率
与传统的人工巡检相比,巡检机器人系统可以有效提升高压室设备巡检的质量和效率。
- 降低运维成本
巡检机器人可以减少运维人员的工作强度和风险,降低运维成本。