这一节介绍雷达的使用,我们使用的雷达型号是ydlidar x3
1.进入工作空间
bash
cd catkin_ws/src2.下载官方提供的SDK文件
bash
git clone https://github.com/YDLIDAR/YDLidar-SDK.git3.安装cmake
bash
sudo apt install cmake pkg-config4.编译和安装
进入YDLidar-SDK文件夹后如果没有build文件夹可以先创建一个build文件夹然后利用下面的命令编译安装
bash
cd YDLIDAR-SDK
mkdir build
cd build
cmake ..
make
sudo make install5.安装官方提供的ROS功能包
安装到src目录下
bash
cd catkin_ws/src6.从github克隆 ydlidar_ros_driver 包 :
通过指令安装
bash
git clone https://github.com/YDLIDAR/ydlidar_ros_driver.git ydlidar_ws/src/ydlidar_ros_driver7.编译一下
bash
cd catkin_ws
catkin_make没有报错就编译成功了
8.环境设置
bash
cd catkin_ws
source ./devel/setup.sh9.给端口添加权限,完成端口绑定
bash
chmod 0777 src/ydlidar_ros_driver/startup/*
sudo sh src/ydlidar_ros_driver/startup/initenv.sh端口绑定完成后重新插入激光雷达,然后启动雷达测试
10.测试 ydlidar_ros_driver
bash
roslaunch ydlidar_ros_driver [launch file]我们使用的是X3雷达,因为官方没有相关的launch文件,所以我使用的是X2的launch文件
bash
roslaunch ydlidar_ros_driver X2.launch 11.另开一个终端输入rviz,查看雷达数据
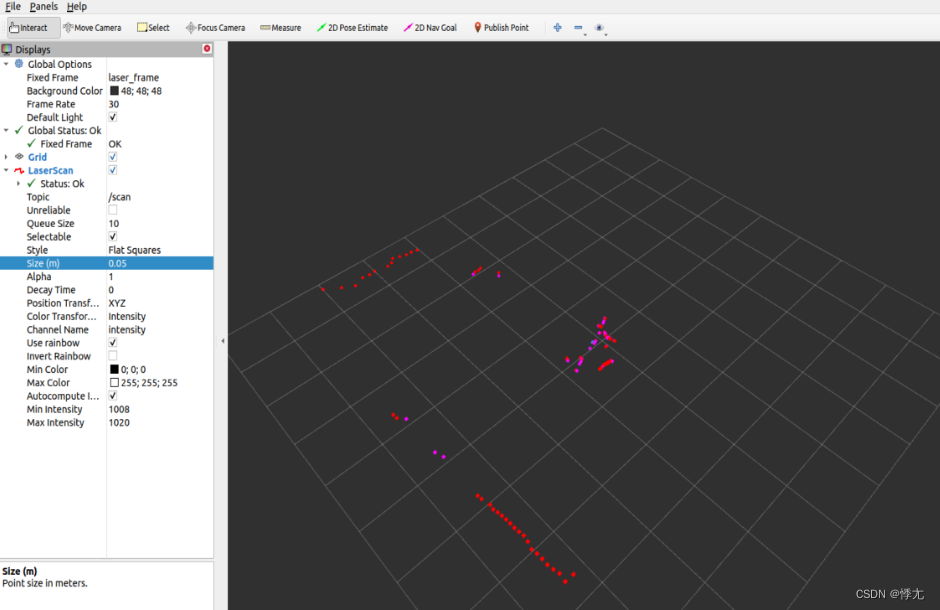
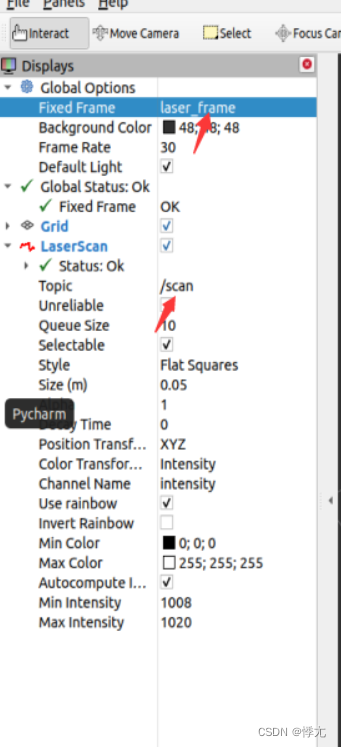
rviz相关配置
到此,雷达的使用就结束了