2013年,2013年Sofien Bouaziz等提出了一种新的ICP改进算法,稀疏迭代最近点(Sparse Iterative Closest Point, Sparse ICP)算法。更多扩展资料可参看随书附赠资源中的说明文档。
Sparse ICP算法的设计的灵感、应用范围、优缺点和泛化能力
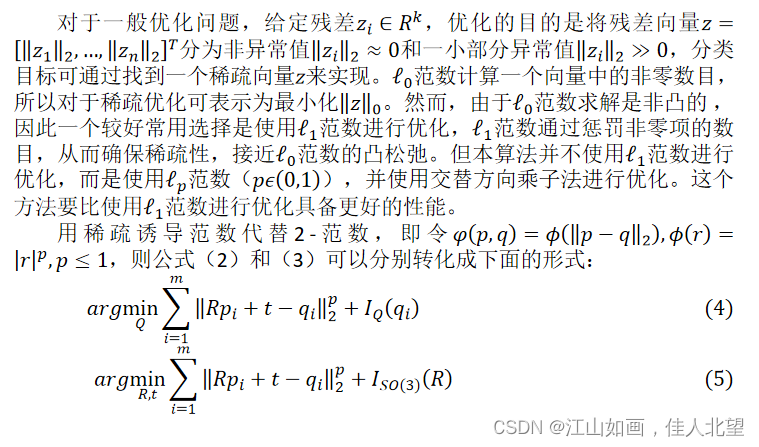
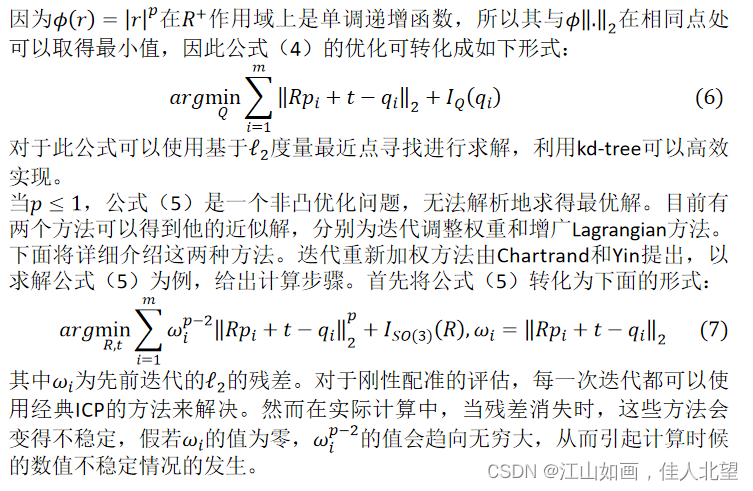
两个几何数据集的刚性配准在机器人导航、表面重建和形状匹配等许多应用中都是必不可少的。最常见的方法是使用迭代最近点(ICP)算法的变体来完成这项任务。原始ICP算法目前的主要困难是在3D扫描中会经常出现异常值和缺失数据的情况。大多数ICP算法的实际实现都通过一些启发式算法来修剪或调整对应的相对权重来解决这个问题。然而,这些启发式方法可能不可靠且难以调优,这通常需要大量的人工协助。Sofien Bouaziz等提出了一种新的ICP算法,通过使用稀疏诱导范数对配准进行优化从而避免噪声、重叠区域有数据缺失等造成的问题。Sparse ICP算法保留了ICP算法的简单结构,同时在处理异常值和不完全数据时取得了更好的配准结果。 Sparse ICP算法对经典的ICP算法进行了扩展,系统地解决了在获得的三维数据中常见的异常值问题。我们将ICP配准问题表达为一个稀疏l_p优化问题,得到了一种无启发式、鲁棒的仅具有一个自由参数的刚性配准算法。算法利用稀疏l_p范数改进ICP算法的鲁棒性,即在l_p范数配准模型上增加p范数的惩罚项,提高每次迭代中求解匹配点的准确性,但其利用增广拉格朗日求解大规模点云配准问题时效率较差。
Sparse ICP算法原理描述
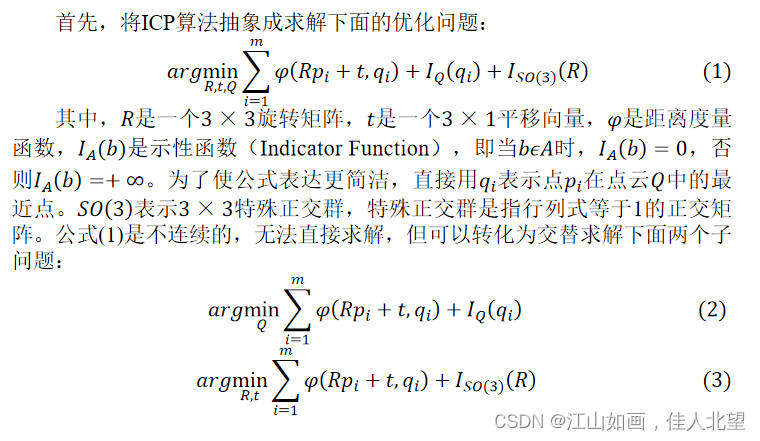
Sparse ICP算法利用稀疏范数对离群点的鲁棒性,不需要任何直觉上的"修剪"规则,获得了比经典ICP算法更好地配准结果。下图5-1给出了一个具体的例子,当p的值降低的时候,配准更精确。
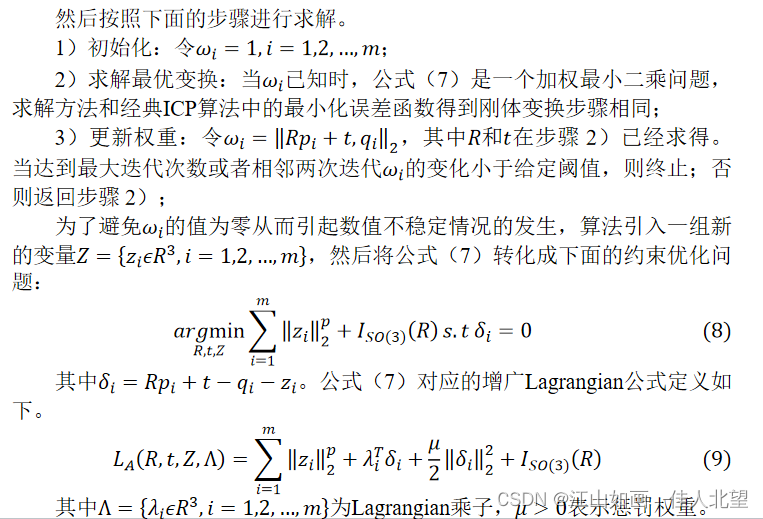
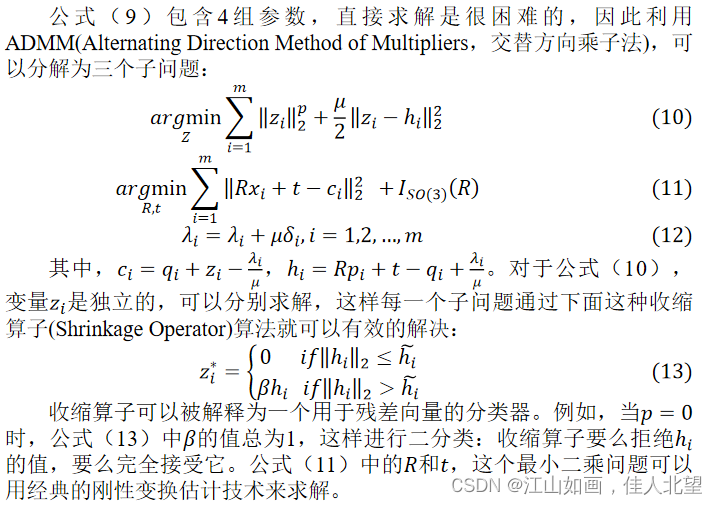
Sparse ICP算法引入稀疏度对模型配准优化,利用l_p范数取代2范数,最大化对应点间距离为0的数量,避免局部噪声对求解的影响。该算法采用拉格朗日方法对误差函数重新定义,解决数值不稳定等问题,再利用交换方向乘子法将重新定义的误差函数分成三个子问题,并通过收缩算子进行求解,提高了算法的精确度,使算法更加可靠。