文章目录:
一、库文件的下载及导入
二、库文件源代码说明
三、库文件应用举例
一、库文件的下载及导入
有关arduino开源库的导入有两种方案:
1.第一种方案需要借助arduino.cc网站来进行查询下载,然后在Arduino软件中进行导入。
2.第二种方案则只需要使用较新版本的Arduino软件(2.2版本之后),在软件中可以直接搜索并导入开源库。
1.在Arduino.cc进行导入库
首先在网页地址框直接输入arduino.cc便可进入网站:
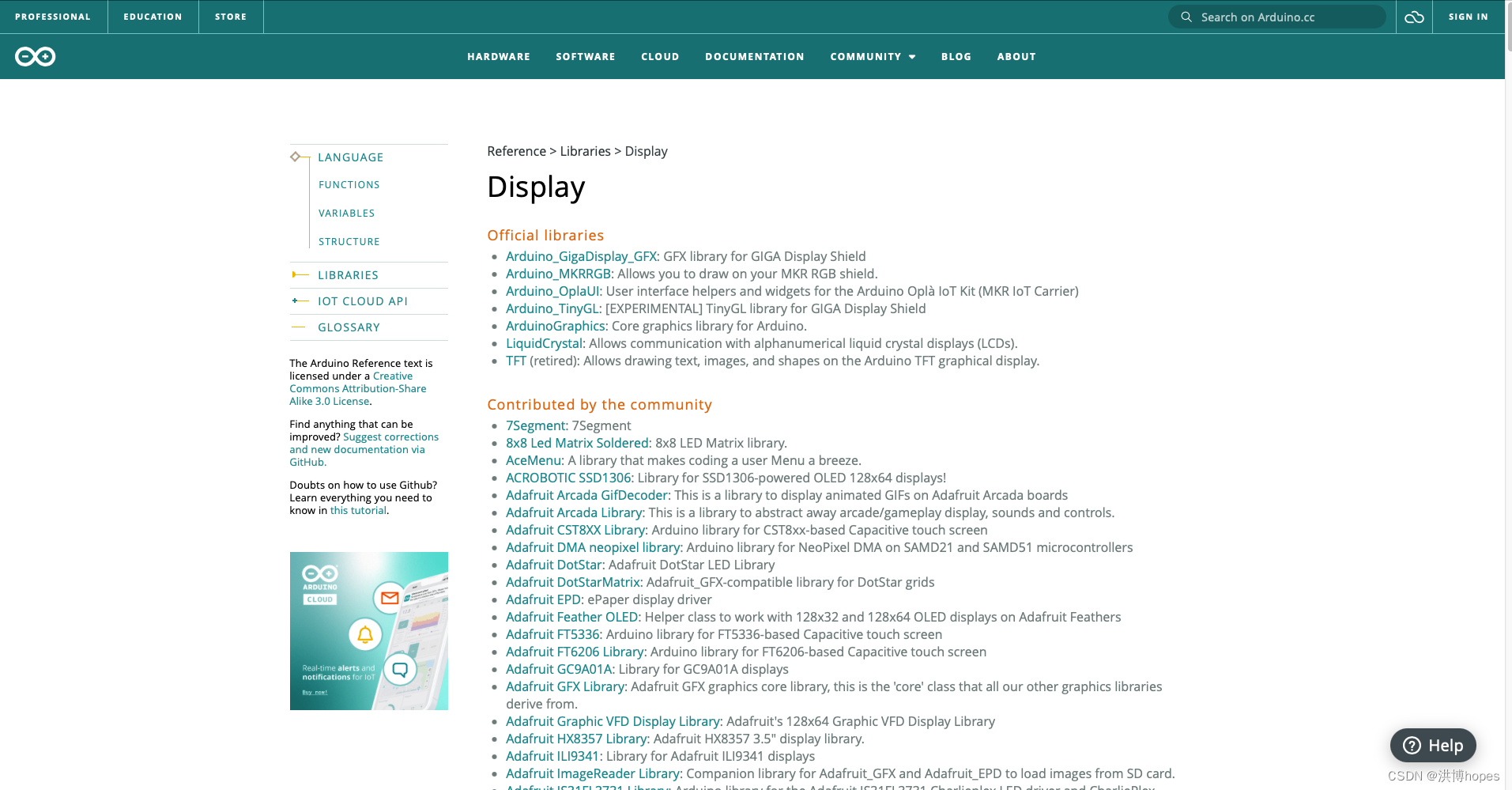
然后点击上方【DOCUMENTATION】选项:
在此页面点击左侧【Libraries】选项,便可进入官方收录的库文件页面:
选择要用的库文件的类目,这里以【display】为例:
然后点击具体的库文件,以【LiquidCrystal】为例:
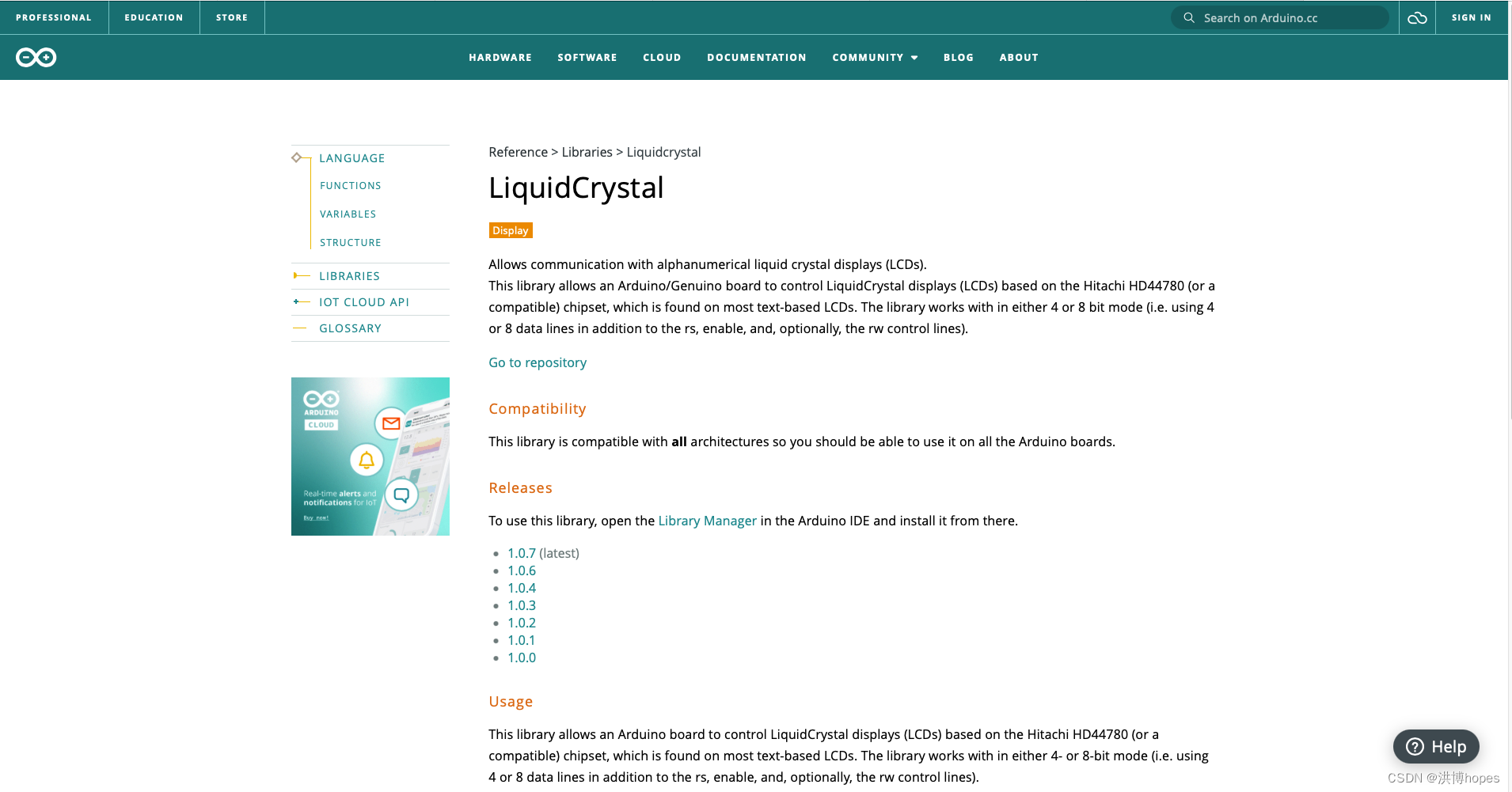
进入库文件下载目录后,直接点击要用的版本号即可直接下载。
下载完成后如果不是压缩包,最好压缩成zip文件:
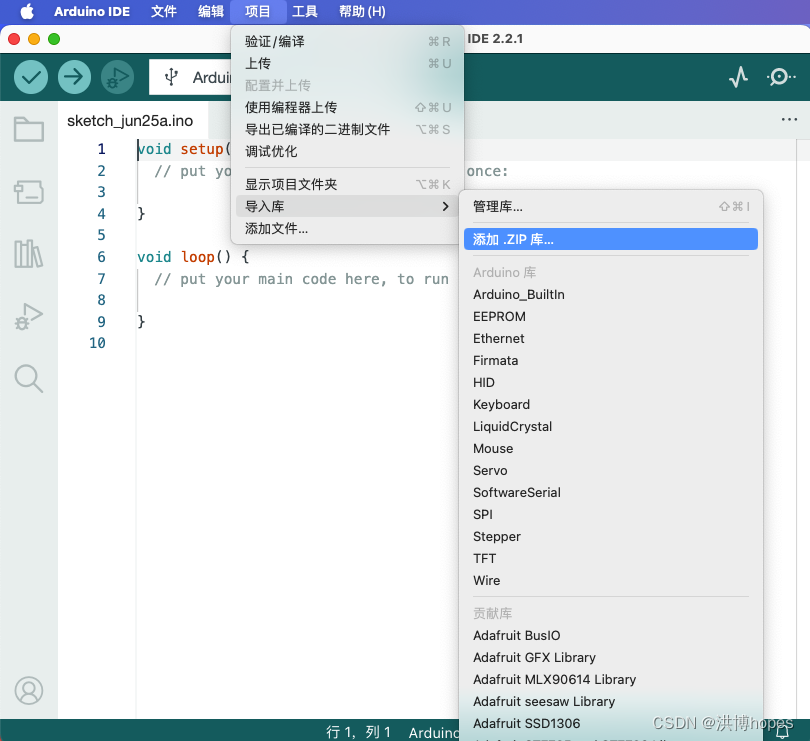
最后打开Arduino软件,选择【项目】-【导入库】-【添加.ZIP库】然后选择对应的zip文件即可导入成功。
2.使用Arduino软件导入库
上述方案较为复杂,所以建议使用较新版本的Arduino软件直接导入库:

在此版本的软件中直接点选左侧的"书籍"样式的图标(其表示为库文件),然后直接在搜索框查找要使用的库文件名,选择对应库文件及版本点击安装即可。
这种方案则最为简洁,当然有些时候要使用的库在软件中查询不到,此时就需要采用第一种方案进行导入。
2、库文件源代码说明
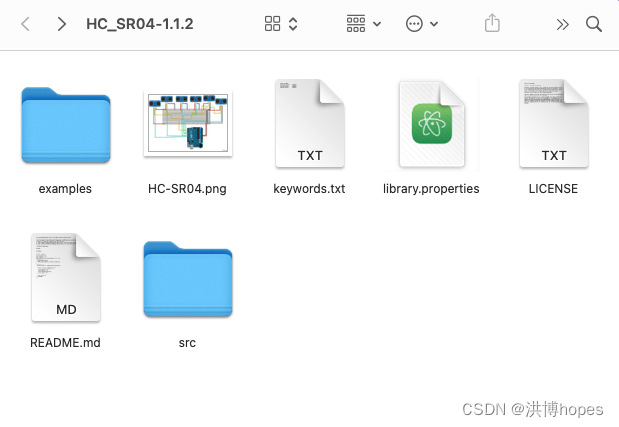
如上图所示,一般库文件中会有如上几个文件(会存在些许不同)。
1.示例程序的使用
example文件即为【示例】,这里面会有开源文件贡献者编写的几个示例程序,用于帮助学习者理解库的使用:
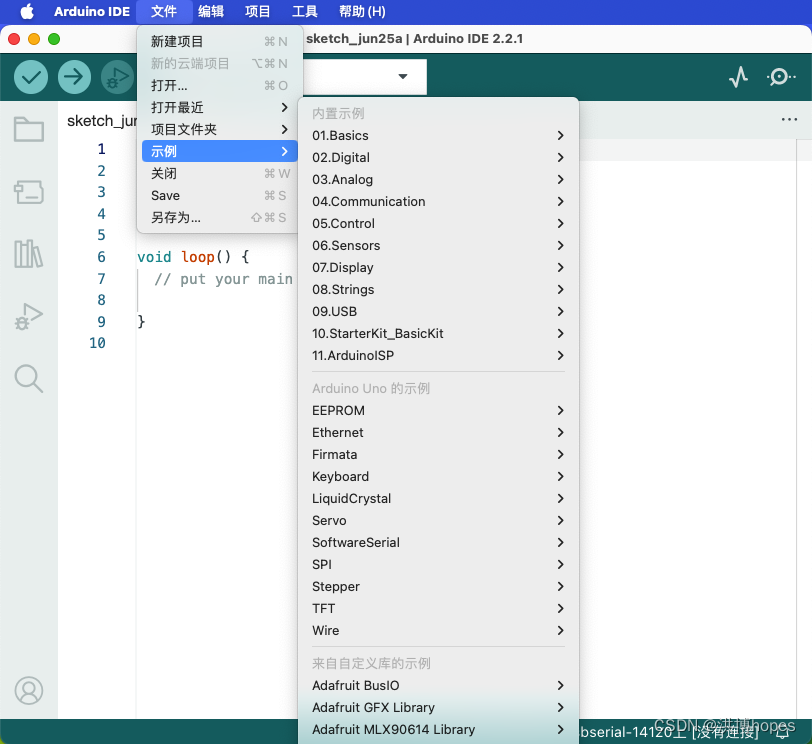
当然只要将库文件导入过Arduino中,也可以在Arduino软件中打开相应的示例程序:
2.【.h文件】及【.cpp】文件说明
在【src】文件夹中存在以下两个文件:
【.h】后缀我们称之为头文件 ,【.cpp】后缀我们称之为源文件
头文件 通常包含类声明 、函数原型 、宏定义 和全局变量声明等。它们的目的是提供一种方式来共享代码,并确保在多个源文件中使用一致的声明:
cpp
/*
HCSR04 - Library for arduino, for HC-SR04 ultrasonic distance sensor.
Created by Dirk Sarodnick, 2020.
*/
#ifndef HCSR04_H
#define HCSR04_H
#include "Arduino.h"
#define HCSR04_INVALID_RESULT -1;
#define HCSR04_NO_TRIGGER -2;
#define HCSR04_NO_ECHO -3;
class HCSR04Sensor {
public:
HCSR04Sensor();
~HCSR04Sensor();
typedef enum eUltraSonicUnlock {
unlockSkip = 0,
unlockMaybe = 1,
unlockForced = 2
} eUltraSonicUnlock_t;
void begin(uint8_t triggerPin, uint8_t echoPin) { begin(triggerPin, new uint8_t[1]{ echoPin }, 1); }
void begin(uint8_t triggerPin, uint8_t* echoPins, uint8_t echoCount) { begin(triggerPin, echoPins, echoCount, 100000, eUltraSonicUnlock_t::unlockSkip); }
void begin(uint8_t triggerPin, uint8_t echoPin, uint32_t timeout, eUltraSonicUnlock_t unlock) { begin(triggerPin, new uint8_t[1]{ echoPin }, 1, timeout, unlock); }
void begin(uint8_t triggerPin, uint8_t* echoPins, uint8_t echoCount, uint32_t timeout, eUltraSonicUnlock_t unlock) { begin(triggerPin, echoPins, echoCount, timeout, 10, 10, unlock); }
void begin(uint8_t triggerPin, uint8_t* echoPins, uint8_t echoCount, uint32_t timeout, uint16_t triggerTime, uint16_t triggerWait, eUltraSonicUnlock_t unlock);
void end();
long* measureMicroseconds() { measureMicroseconds(lastMicroseconds); return lastMicroseconds; }
void measureMicroseconds(long* results);
double* measureDistanceMm() { measureDistanceMm(defaultTemperature, lastDistances); return lastDistances; }
void measureDistanceMm(double* results) { measureDistanceMm(defaultTemperature, results == NULL ? lastDistances : results); }
double* measureDistanceMm(float temperature) { measureDistanceMm(temperature, lastDistances); return lastDistances; }
void measureDistanceMm(float temperature, double* results);
double* measureDistanceCm() { measureDistanceCm(defaultTemperature, lastDistances); return lastDistances; }
void measureDistanceCm(double* results) { measureDistanceCm(defaultTemperature, results == NULL ? lastDistances : results); }
double* measureDistanceCm(float temperature) { measureDistanceCm(temperature, lastDistances); return lastDistances; }
void measureDistanceCm(float temperature, double* results);
double* measureDistanceIn() { measureDistanceIn(defaultTemperature, lastDistances); return lastDistances; }
void measureDistanceIn(double* results) { measureDistanceIn(defaultTemperature, results == NULL ? lastDistances : results); }
double* measureDistanceIn(float temperature) { measureDistanceIn(temperature, lastDistances); return lastDistances; }
void measureDistanceIn(float temperature, double* results);
static void triggerInterrupt0(void);
static void triggerInterrupt1(void);
static void triggerInterrupt2(void);
static void triggerInterrupt3(void);
static void triggerInterrupt4(void);
static void triggerInterrupt5(void);
static void triggerInterrupt6(void);
static void triggerInterrupt7(void);
static void triggerInterrupt8(void);
static void triggerInterrupt9(void);
static void echoInterrupt0(void);
static void echoInterrupt1(void);
static void echoInterrupt2(void);
static void echoInterrupt3(void);
static void echoInterrupt4(void);
static void echoInterrupt5(void);
static void echoInterrupt6(void);
static void echoInterrupt7(void);
static void echoInterrupt8(void);
static void echoInterrupt9(void);
private:
float defaultTemperature = 19.307;
long* lastMicroseconds;
double* lastDistances;
uint32_t timeout;
uint16_t triggerTime = 10; // HC-SR04 needs at least 10�s trigger. Others may need longer trigger pulses.
uint16_t triggerWait = 10; // HC-SR04 sends its signal about 200�s. We only wait a small amount to reduce interference, but to not miss anything on slower clock speeds.
volatile uint8_t triggerPin;
volatile unsigned long* volatile triggerTimes;
uint8_t echoCount;
volatile int16_t* volatile echoStages;
volatile int16_t* volatile echoInts;
volatile int16_t* volatile echoPorts;
volatile unsigned long* volatile echoTimes;
void triggerInterrupt(uint8_t);
void echoInterrupt(uint8_t);
void unlockSensors(eUltraSonicUnlock_t, uint8_t*);
};
extern HCSR04Sensor HCSR04;
#endif // HCSR04_H源文件包含了实现代码,即函数和方法的定义。它们通常包含与头文件对应的实现:
cpp
/*
HCSR04 - Library for arduino, for HC-SR04 ultrasonic distance sensor.
Created by Dirk Sarodnick, 2020.
*/
#include "Arduino.h"
#include "HCSR04.h"
HCSR04Sensor::HCSR04Sensor() {}
HCSR04Sensor::~HCSR04Sensor() { this->end(); }
void HCSR04Sensor::begin(uint8_t triggerPin, uint8_t* echoPins, uint8_t echoCount, uint32_t timeout, uint16_t triggerTime, uint16_t triggerWait, eUltraSonicUnlock_t unlock) {
if (this->echoCount != echoCount) this->end();
this->triggerPin = triggerPin;
pinMode(triggerPin, OUTPUT);
this->timeout = timeout;
this->triggerTime = triggerTime;
this->triggerWait = triggerWait;
this->echoCount = echoCount;
if (this->lastMicroseconds == NULL) this->lastMicroseconds = new long[echoCount];
if (this->lastDistances == NULL) this->lastDistances = new double[echoCount];
if (this->triggerTimes == NULL) this->triggerTimes = new unsigned long[echoCount];
if (this->echoTimes == NULL) this->echoTimes = new unsigned long[echoCount];
if (this->echoStages == NULL) this->echoStages = new int16_t[echoCount];
if (this->echoInts == NULL) this->echoInts = new int16_t[echoCount];
if (this->echoPorts == NULL) this->echoPorts = new int16_t[echoCount];
for (uint8_t i = 0; i < this->echoCount; i++) {
this->triggerTimes[i] = 0;
this->echoTimes[i] = 0;
int16_t interrupt = digitalPinToInterrupt(echoPins[i]);
if (interrupt == NOT_AN_INTERRUPT) {
this->echoStages[i] = -1;
this->echoInts[i] = -1;
this->echoPorts[i] = echoPins[i];
} else {
this->echoStages[i] = 0;
this->echoInts[i] = interrupt;
this->echoPorts[i] = -1;
}
pinMode(echoPins[i], INPUT);
}
// Unlock sensors that are possibly in a locked state, if this feature is enabled.
this->unlockSensors(unlock, echoPins);
}
void HCSR04Sensor::end() {
if (this->lastMicroseconds != NULL) delete []this->lastMicroseconds;
if (this->lastDistances != NULL) delete []this->lastDistances;
if (this->triggerTimes != NULL) delete []this->triggerTimes;
if (this->echoTimes != NULL) delete []this->echoTimes;
if (this->echoPorts != NULL) delete []this->echoPorts;
if (this->echoInts != NULL) delete []this->echoInts;
if (this->echoStages != NULL) delete []this->echoStages;
this->lastMicroseconds = NULL;
this->lastDistances = NULL;
this->triggerTimes = NULL;
this->echoTimes = NULL;
this->echoPorts = NULL;
this->echoInts = NULL;
this->echoStages = NULL;
}
void HCSR04Sensor::measureMicroseconds(long* results) {
if (results == NULL) results = this->lastMicroseconds;
bool finished = true;
bool waiting = true;
unsigned long startMicros = micros();
unsigned long currentMicros = 0;
unsigned long elapsedMicros = 0;
// Make sure that trigger pin is LOW.
digitalWrite(triggerPin, LOW);
delayMicroseconds(4);
// Hold trigger HIGH for 10 microseconds (default), which signals the sensor to measure distance.
digitalWrite(triggerPin, HIGH);
delayMicroseconds(this->triggerTime);
// Set trigger LOW again and wait to give the sensor time for sending the signal without interference
digitalWrite(triggerPin, LOW);
delayMicroseconds(this->triggerWait);
// Attach interrupts to echo pins for the starting point
for (uint8_t i = 0; i < this->echoCount; i++) {
if (this->echoInts[i] >= 0 && this->echoStages[i] == 0) {
this->echoStages[i] = 1;
switch (i) {
case 0: attachInterrupt(this->echoInts[i], &triggerInterrupt0, RISING); break;
case 1: attachInterrupt(this->echoInts[i], &triggerInterrupt1, RISING); break;
case 2: attachInterrupt(this->echoInts[i], &triggerInterrupt2, RISING); break;
case 3: attachInterrupt(this->echoInts[i], &triggerInterrupt3, RISING); break;
case 4: attachInterrupt(this->echoInts[i], &triggerInterrupt4, RISING); break;
case 5: attachInterrupt(this->echoInts[i], &triggerInterrupt5, RISING); break;
case 6: attachInterrupt(this->echoInts[i], &triggerInterrupt6, RISING); break;
case 7: attachInterrupt(this->echoInts[i], &triggerInterrupt7, RISING); break;
case 8: attachInterrupt(this->echoInts[i], &triggerInterrupt8, RISING); break;
case 9: attachInterrupt(this->echoInts[i], &triggerInterrupt9, RISING); break;
}
}
}
// Wait until all echos are returned or timed out.
while(true) {
delayMicroseconds(1);
finished = true;
waiting = true;
currentMicros = micros();
elapsedMicros = currentMicros - startMicros;
for (uint8_t i = 0; i < this->echoCount; i++) {
waiting &= elapsedMicros < this->timeout || (this->triggerTimes[i] > 0 && this->echoTimes[i] == 0 && (currentMicros - this->triggerTimes[i]) < this->timeout);
if (this->echoPorts[i] >= 0 && this->triggerTimes[i] == 0) {
if (digitalRead(this->echoPorts[i]) == HIGH) this->triggerTimes[i] = micros();
}
if (this->triggerTimes[i] > 0 || !waiting) {
if (this->echoInts[i] >= 0 && (this->echoStages[i] == 1 || !waiting)) {
if (this->echoStages[i] == 1) this->echoStages[i] = 2;
detachInterrupt(this->echoInts[i]);
}
} else finished &= false;
if (this->echoInts[i] >= 0 && this->triggerTimes[i] > 0 && this->echoStages[i] == 2 && waiting) {
this->echoStages[i] = 3;
switch (i) {
case 0: attachInterrupt(this->echoInts[i], &echoInterrupt0, FALLING); break;
case 1: attachInterrupt(this->echoInts[i], &echoInterrupt1, FALLING); break;
case 2: attachInterrupt(this->echoInts[i], &echoInterrupt2, FALLING); break;
case 3: attachInterrupt(this->echoInts[i], &echoInterrupt3, FALLING); break;
case 4: attachInterrupt(this->echoInts[i], &echoInterrupt4, FALLING); break;
case 5: attachInterrupt(this->echoInts[i], &echoInterrupt5, FALLING); break;
case 6: attachInterrupt(this->echoInts[i], &echoInterrupt6, FALLING); break;
case 7: attachInterrupt(this->echoInts[i], &echoInterrupt7, FALLING); break;
case 8: attachInterrupt(this->echoInts[i], &echoInterrupt8, FALLING); break;
case 9: attachInterrupt(this->echoInts[i], &echoInterrupt9, FALLING); break;
}
}
if (this->echoPorts[i] >= 0 && this->triggerTimes[i] > 0 && this->echoTimes[i] == 0) {
if (digitalRead(this->echoPorts[i]) == LOW) this->echoTimes[i] = micros();
}
if ((this->triggerTimes[i] > 0 && this->echoTimes[i] > 0) || !waiting) {
if (this->echoInts[i] >= 0 && (this->echoStages[i] == 3 || !waiting)) {
if (this->echoStages[i] == 3) this->echoStages[i] = 4;
detachInterrupt(this->echoInts[i]);
}
} else finished &= false;
}
if (!waiting || finished) break;
}
// Determine the durations of each sensor.
for (uint8_t i = 0; i < this->echoCount; i++) {
if (this->echoInts[i] >= 0) this->echoStages[i] = 0;
if (this->triggerTimes[i] > 0 && this->echoTimes[i] > 0) {
long resultTime = this->echoTimes[i] - this->triggerTimes[i];
results[i] = resultTime > 0 ? resultTime : HCSR04_INVALID_RESULT;
} else if (this->triggerTimes[i] > 0) {
results[i] = HCSR04_NO_ECHO;
} else {
results[i] = HCSR04_NO_TRIGGER;
}
this->triggerTimes[i] = 0;
this->echoTimes[i] = 0;
}
}
void HCSR04Sensor::measureDistanceMm(float temperature, double* results) {
if (results == NULL) results = this->lastDistances;
double speedOfSoundInMmPerMs = (331.3 + 0.606 * temperature) / 1000; // Cair ≈ (331.3 + 0.606 ⋅ ϑ) m/s
long* times = measureMicroseconds();
// Calculate the distance in mm for each result.
for (uint8_t i = 0; i < this->echoCount; i++) {
double distanceMm = times[i] / 2.0 * speedOfSoundInMmPerMs;
if (distanceMm < 10 || distanceMm > 4000) {
results[i] = HCSR04_INVALID_RESULT;
} else {
results[i] = distanceMm;
}
}
}
void HCSR04Sensor::measureDistanceCm(float temperature, double* results) {
if (results == NULL) results = this->lastDistances;
double speedOfSoundInCmPerMs = (331.3 + 0.606 * temperature) / 1000 / 10; // Cair ≈ (331.3 + 0.606 ⋅ ϑ) m/s
long* times = measureMicroseconds();
// Calculate the distance in cm for each result.
for (uint8_t i = 0; i < this->echoCount; i++) {
double distanceCm = times[i] / 2.0 * speedOfSoundInCmPerMs;
if (distanceCm < 1 || distanceCm > 400) {
results[i] = HCSR04_INVALID_RESULT;
} else {
results[i] = distanceCm;
}
}
}
void HCSR04Sensor::measureDistanceIn(float temperature, double* results) {
if (results == NULL) results = this->lastDistances;
double speedOfSoundInCmPerMs = (331.3 + 0.606 * temperature) * 39.37007874 / 1000 / 1000; // Cair ≈ (331.3 + 0.606 ⋅ ϑ) m/s
long* times = measureMicroseconds();
// Calculate the distance in cm for each result.
for (uint8_t i = 0; i < this->echoCount; i++) {
double distanceIn = times[i] / 2.0 * speedOfSoundInCmPerMs;
if (distanceIn < 1 || distanceIn > 157.4804) {
results[i] = HCSR04_INVALID_RESULT;
}
else {
results[i] = distanceIn;
}
}
}
void HCSR04Sensor::unlockSensors(eUltraSonicUnlock_t unlock, uint8_t* echoPins) {
if (unlock == eUltraSonicUnlock_t::unlockSkip) return;
bool hasLocked = false;
// Check if any sensor is in a locked state and unlock it if necessary.
for (uint8_t i = 0; echoPins[i] != 0; i++) {
if (unlock == eUltraSonicUnlock_t::unlockMaybe && digitalRead(echoPins[i]) == LOW) continue;
pinMode(echoPins[i], OUTPUT);
digitalWrite(echoPins[i], LOW);
hasLocked = true;
}
if (hasLocked) delay(100);
// Revert the pinMode after potential unlocking.
for (uint8_t i = 0; echoPins[i] != 0; i++) {
pinMode(echoPins[i], INPUT);
}
if (hasLocked) delay(100);
}
void HCSR04Sensor::triggerInterrupt(uint8_t index) {
if (this->triggerTimes[index] == 0) this->triggerTimes[index] = micros();
}
void HCSR04Sensor::echoInterrupt(uint8_t index) {
if (this->triggerTimes[index] > 0 && this->echoTimes[index] == 0) this->echoTimes[index] = micros();
}
void HCSR04Sensor::triggerInterrupt0() { HCSR04.triggerInterrupt(0); }
void HCSR04Sensor::triggerInterrupt1() { HCSR04.triggerInterrupt(1); }
void HCSR04Sensor::triggerInterrupt2() { HCSR04.triggerInterrupt(2); }
void HCSR04Sensor::triggerInterrupt3() { HCSR04.triggerInterrupt(3); }
void HCSR04Sensor::triggerInterrupt4() { HCSR04.triggerInterrupt(4); }
void HCSR04Sensor::triggerInterrupt5() { HCSR04.triggerInterrupt(5); }
void HCSR04Sensor::triggerInterrupt6() { HCSR04.triggerInterrupt(6); }
void HCSR04Sensor::triggerInterrupt7() { HCSR04.triggerInterrupt(7); }
void HCSR04Sensor::triggerInterrupt8() { HCSR04.triggerInterrupt(8); }
void HCSR04Sensor::triggerInterrupt9() { HCSR04.triggerInterrupt(9); }
void HCSR04Sensor::echoInterrupt0() { HCSR04.echoInterrupt(0); }
void HCSR04Sensor::echoInterrupt1() { HCSR04.echoInterrupt(1); }
void HCSR04Sensor::echoInterrupt2() { HCSR04.echoInterrupt(2); }
void HCSR04Sensor::echoInterrupt3() { HCSR04.echoInterrupt(3); }
void HCSR04Sensor::echoInterrupt4() { HCSR04.echoInterrupt(4); }
void HCSR04Sensor::echoInterrupt5() { HCSR04.echoInterrupt(5); }
void HCSR04Sensor::echoInterrupt6() { HCSR04.echoInterrupt(6); }
void HCSR04Sensor::echoInterrupt7() { HCSR04.echoInterrupt(7); }
void HCSR04Sensor::echoInterrupt8() { HCSR04.echoInterrupt(8); }
void HCSR04Sensor::echoInterrupt9() { HCSR04.echoInterrupt(9); }
HCSR04Sensor HCSR04;三、库文件应用举例
下文以超声波传感器 的库HCSR04 来进行举例(仅说明代码用法,不作实物接线)
在导入HCSR04库之后,可打开库文件中的实例:
c
#include <HCSR04.h>
HCSR04 hc(5, 6); //initialisation class HCSR04 (trig pin , echo pin)
//初始化超声波传感器,即表明接口号。
void setup()
{
Serial.begin(9600); //串口初始化
}
void loop()
{
Serial.println(hc.dist()); // return curent distance in serial
// hc.dist()会返回超声波传感器检测的距离数据
delay(60); // 延时60毫秒
}具体实例可参考文章------Arduino项目式编程教学第四章------超声波测距
如果想要了解此库文件下的方法,则可以在Arduino软件中,按住【Alt / cmd】键,然后使用鼠标点击对应的库文件名,即可打开其头文件 :
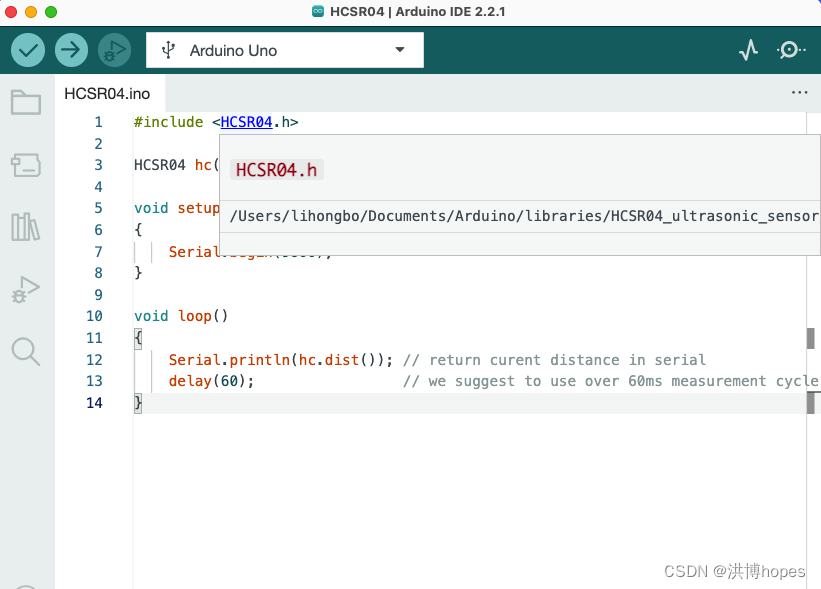
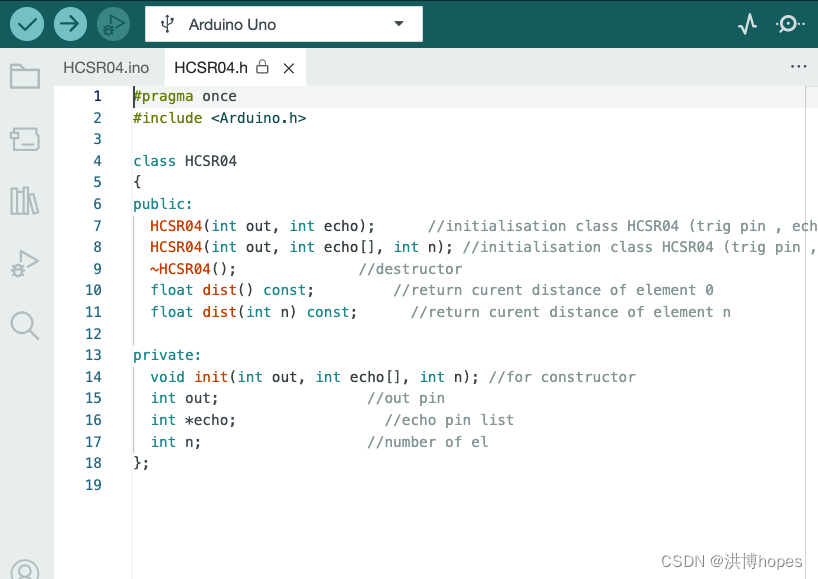
在头文件中,可以阅读文件贡献者做出的注释来了解此库文件中可供使用的方法。