目录
一、算法原理
1、概述
多视滤波算法较简单,实现较容易,干涉相位 ϕ \phi ϕ可以通过下式得到:
ϕ = W ( a r t a n a 2 b 1 − a 1 b 2 a 1 a 2 + b 1 b 2 ) (1) \phi=W\Bigg(artan\Bigg\\frac{a_2b_1-a_1b_2}{a_1a_2+b_1b_2}\\Bigg\Bigg) \tag{1} ϕ=W(artana1a2+b1b2a2b1−a1b2)(1)
其中: ϕ \phi ϕ为相位值, a 1 a 2 a_1a_2 a1a2和 b 1 b 2 b_1b_2 b1b2分别为复影像的实部与虚部。多视处理公式如下:
ϕ m u l t = ∑ k = − ( M − 1 ) 2 ( M − 1 ) 2 ∑ l = − ( N − 1 ) 2 ( N − 1 ) 2 I ( i + k , j + l ) M × N (2) \phi_{mult}=\frac{\sum_{k=-(M-1)^2}^{(M-1)^2 }\sum_{l=-(N-1)^2}^{(N-1)^2}I(i+k,j+l)}{M \times N} \tag{2} ϕmult=M×N∑k=−(M−1)2(M−1)2∑l=−(N−1)2(N−1)2I(i+k,j+l)(2)
其中: M M M为方位向视数, N N N为距离向视数。多视滤波平滑影像,但是以牺牲空间分辨率为代价,平均视数越大,噪声抑制效果越好。但超过一定极限时,反而会使干涉图失真。
2、参考文献
1薛跃明,郭华东,王长林. InSAR处理中滤波方法研究 J. 遥感技术与应用, 2008, (03): 356-359+245.
二、软件操作
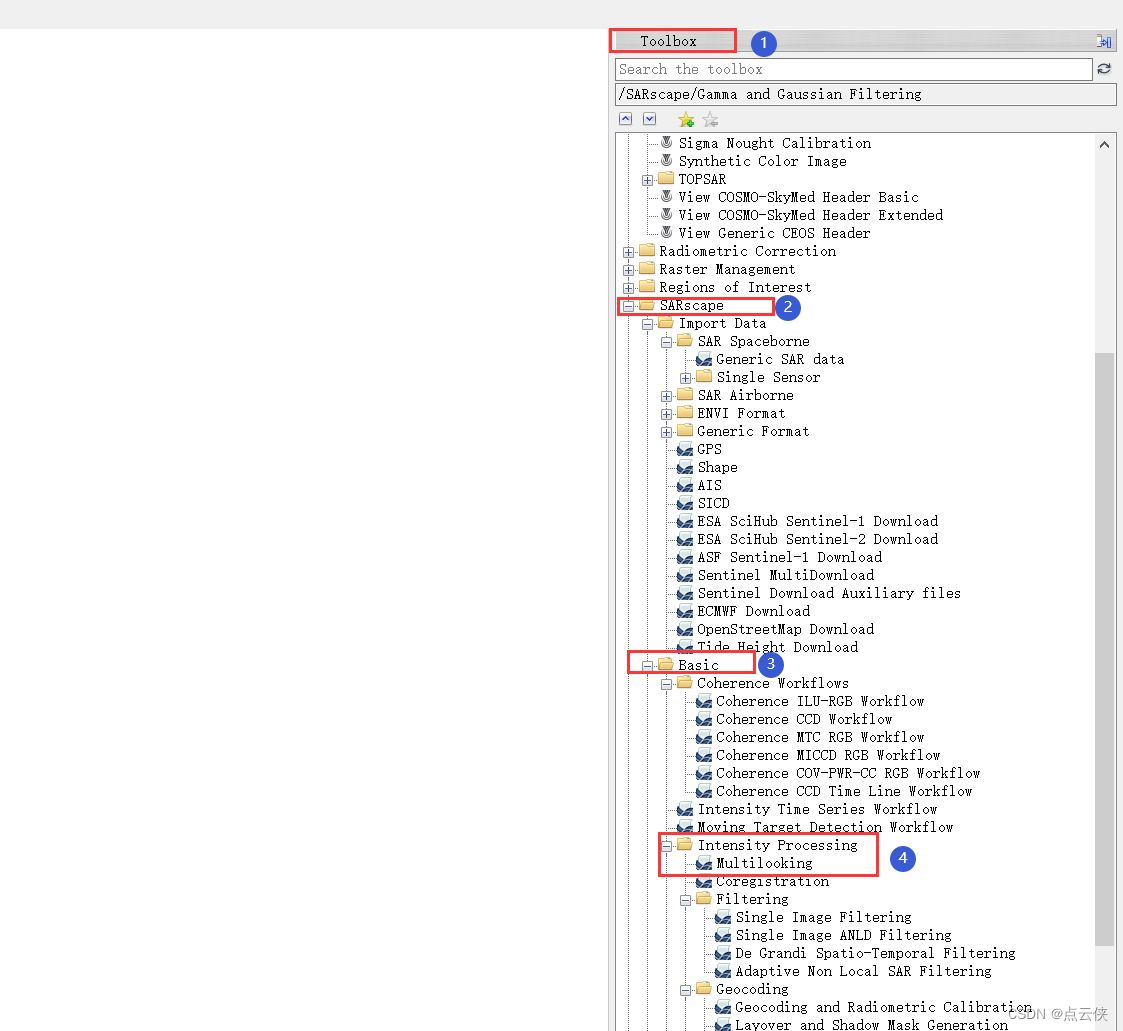
(1)Toolbox 中,选择/SARscape/Basic/Intensity Processing/Multilooking。
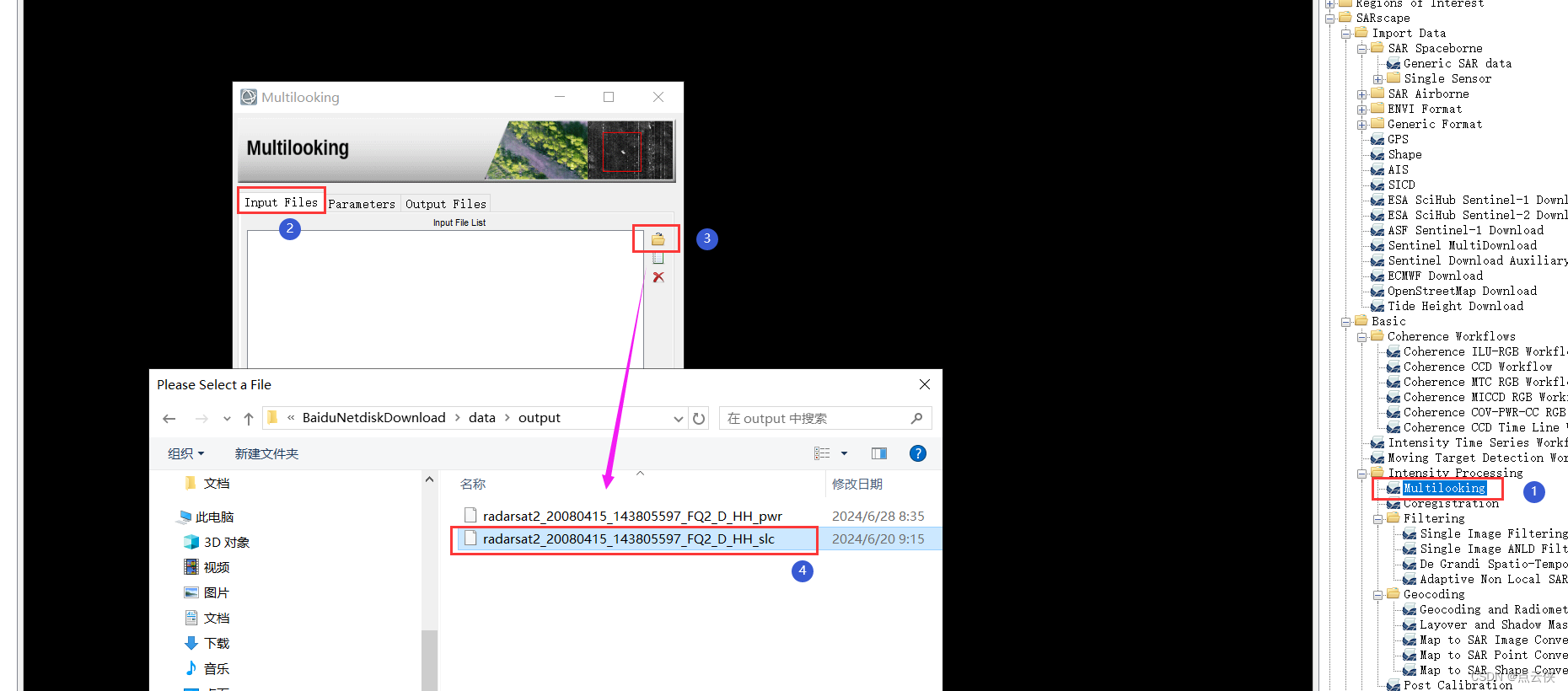
(2)在Multilooking面板:
-
数据输入( Input Files )面板,单击 Brower 按钮,选择所要处理的SLC数据。
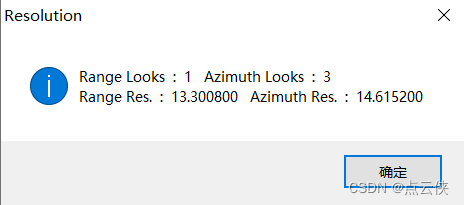
数据,根据 元数据文件自动算出了分辨率和视数。自动计算距离向视数和方位向视数。
-
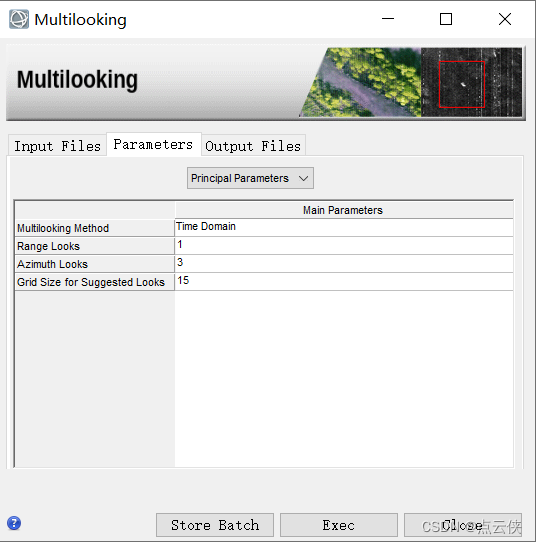
参数设置( Parameters )面板,主要参数设置 Principal Parameters )中,多视的视数和输出的制图分辨率按照默认。
•数据输出( Output Files): 输出路径和文件名按照默认,自动添加了 _pwr 的后缀。
(3)单击 Exec 执行。
三、结果展示
1、原始图像
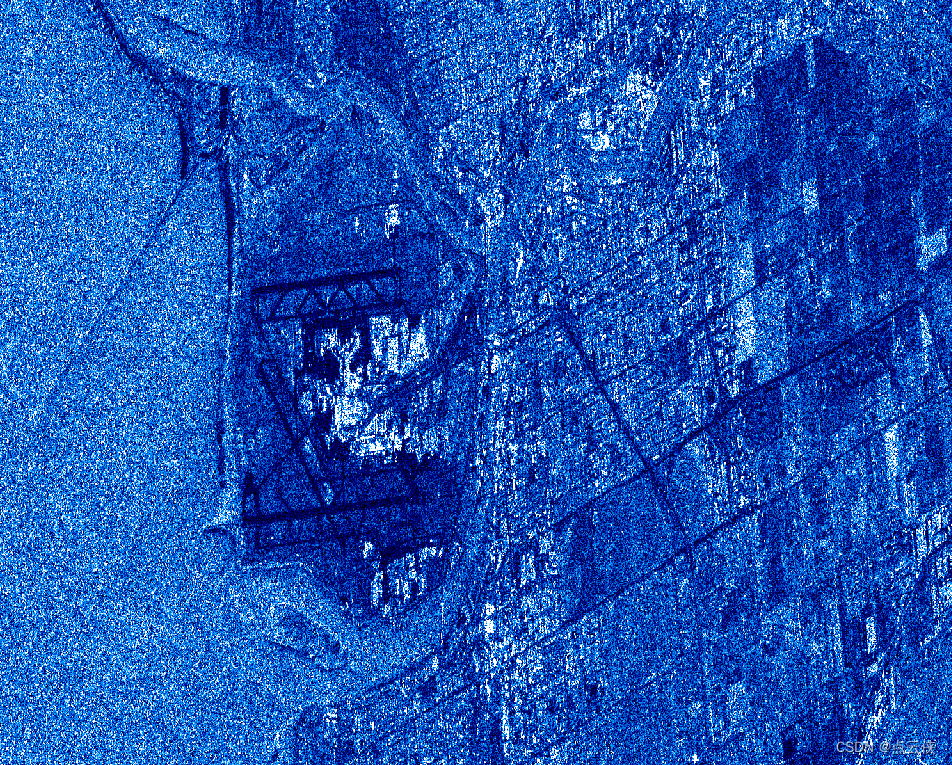
2、滤波结果
