技术栈
关于发那科机器人系统升级方法
jqrbcts
2024-07-02 12:21
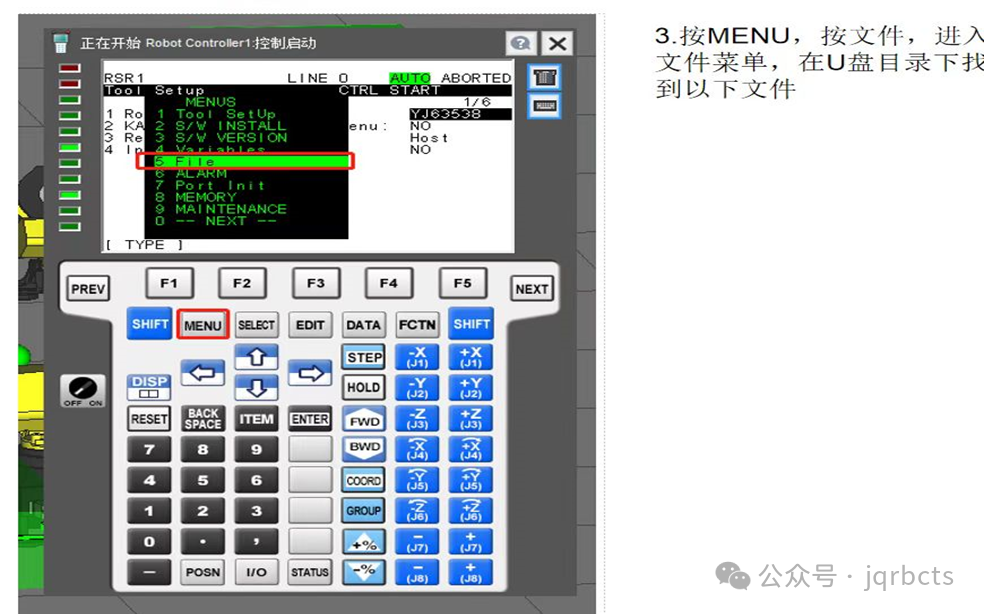
首先需要镜像备份和全备份,最好把机器人要到刻度线位置,零点位置
选择控制器启动,也可以按preev+next进入控制器模式
开发语言
人工智能
python
机器人
c#
上一篇:
卷积层的输出
下一篇:
复杂系统失效原理
相关推荐
阿里云大数据AI技术
5 分钟前
阿里云 EMR Serverless StarRocks(Stella 2.2.0) 发布:内表与湖表同时支持向量、全文与 AI Function,一条 SQL 完成多模态检索
人工智能
格林威
6 分钟前
工业相机Chunk功能全解析:图像嵌入时间戳、编码器元数据(附堡盟C#代码)
开发语言
·
人工智能
·
数码相机
·
计算机视觉
·
c#
·
视觉检测
·
工业相机
怪奇云呼军
10 分钟前
闪电智能Voice Agent:ASR 首字延迟和最终识别延迟怎么测?t0-t3 埋点实战
人工智能
·
科技
·
ai
·
语音识别
冬哥聊AI
17 分钟前
百万行代码里跑Claude Code?三面这题80%的人答不上来
人工智能
甄同学
18 分钟前
第二十三篇:Tasks系统,Claude Code如何统一管理7种后台任务
人工智能
独隅
19 分钟前
IntelliJ IDEA 接入多种AI大模型插件终极指南(2026.1 企业合规版)
java
·
人工智能
·
intellij-idea
Arbori_26215
21 分钟前
Rider 调试 VisionMaster C# 用户脚本
c#
·
visionmaster
有Li
23 分钟前
EvoMDT:用于多癌种结构化临床决策的自进化多智能体系统文献速递/医学智能体前沿
人工智能
·
学习
·
分类
·
文献
·
医学生
小大宇
32 分钟前
Python 集成 Conda
开发语言
·
python
·
conda
小刘BlandNew
34 分钟前
AI核心概念大串联
人工智能
热门推荐
01
2026年7月AI圈大地震:GPT-5.6被政府限制、Claude入驻Slack、Anthropic自研芯片
02
GitHub 镜像站点
03
如何新建文件夹? 电脑新建文件夹的4种方法
04
AI科技热点日报 | 2026年07月01日
05
幻兽帕鲁 - 服务器管理员权限与 GM 命令完全指南
06
国内可直接用、免费额度/永久免费的大模型API清单(含 SiliconFlow、火山、阿里、智谱、百度、Kimi、DeepSeek、DMXAPI 等)
07
AI 编程 IDE 全景解析 2026:Agent 全面接管开发链路
08
2026 国产 AI 大模型横评:DeepSeek、通义千问、Kimi、文心一言、星火、豆包谁更能打?
09
2026 年 AI 大模型 & AI 编程工具实战全总结
10
【解构】DeepSeek V4 发布:技术报告深度解读 + 横向对比六大开源模型,我们的判断是……