重新对8259中断控制器进行编程
c
// 发送ICW1命令字0x11(边沿触发,多片8259级联,最后要发送ICW4字)
mov al,#0x11
out #0x20,al
.word 0x00eb,0x00eb
out #0xA0,al
.word 0x00eb,0x00eb
// 发送ICW2命令字
mov al,#0x20
out #0x21,al
.word 0x00eb,0x00eb
mov al,#0x28
out #0xA1,al
.word 0x00eb,0x00eb
// 发送ICW3命令字
mov al,#0x04
out #0x21,al
.word 0x00eb,0x00eb
mov al,#0x02
out #0xA1,al
.word 0x00eb,0x00eb
// 发送ICW4命令字
mov al,#0x01
out #0x21,al
.word 0x00eb,0x00eb
out #0xA1,al
.word 0x00eb,0x00eb
// 屏蔽所有中断请求
mov al,#0xFF
out #0x21,al
.word 0x00eb,0x00eb
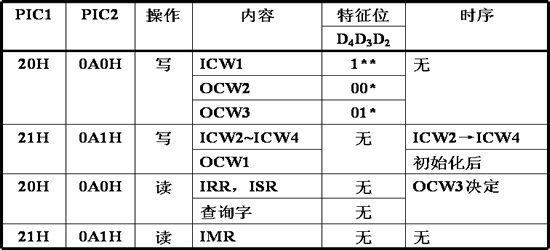
out #0xA1,al端口
PC/XT中,8259A的两个端口地址分别为20H和21H
PC/AT级联8259端口地址:
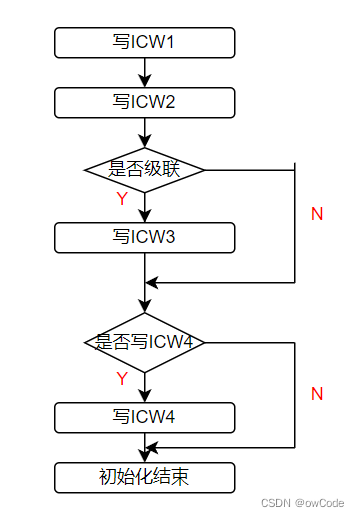
按顺序写入初始化命令字
初始化命令字一定要在系统复位后首先写入8259A,写入时要严格按照写入顺序,不允许颠倒。
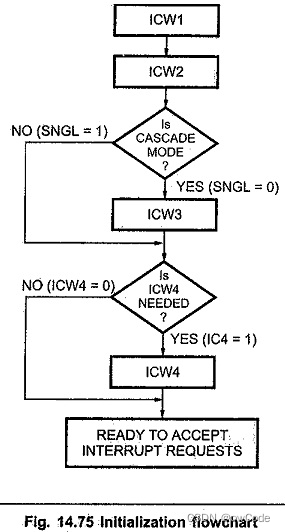
ICW1
ICW1的主要功能:确定级连方式,触发方式
写入ICW1后,8259A内部自动复位,其复位功能为:
(1)初始化命令字顺序逻辑重新置位,准备接收ICW2、ICW3、ICW4
(2)清除IMR和ISR
(3)IRR状态可读
(4)优先级排队,IR0最高,IR7最低
(5)特殊屏蔽方式复位
(6)设定中断请求信号由低变高的边沿触发有效
(7)自动EOI循环方式复位

- ICW1命令字0x11(00010001):边沿触发,
多片8259级联,最后要发送ICW4字(此处已确定写入顺序)
ICW2
ICW2的主要功能:确定中断向量,中断类型码
例:如果ICW2为08H,则
IR3的中断类型号(中断向量)为08H+03H=0BH

- ICW2命令字0x20(00100000):IR0的中断类型号为00H+20H=20H
ICW2命令字0x28(00101000):IR3的中断类型号为03H+28H=2BH
ICW3
ICW3的主要功能:确定主片从片的级连状态,即确定主片的连接位和从片的编码
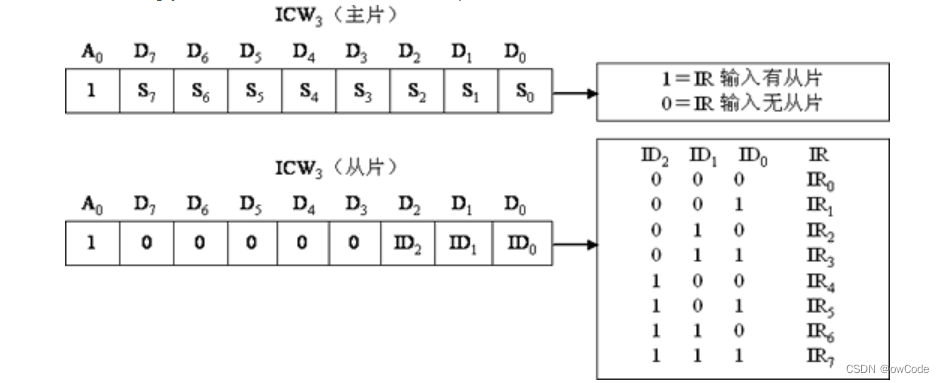
- ICW3命令字0x04(00000100):主芯片的IR2连从芯片INT引脚
ICW3命令字0x02(00000010):从芯片的INT引脚连主芯片的IR2
ICW4
- ICW4命令字0x01(00000001):259A 芯片设置成普通全嵌套、非缓冲、非自动结束中断方式,并且用于 8086 及其兼容系统。
根据要求写入操作命令字
写完初始化命令字后,8259A已经建立了基本的工作环境,可以接受中断请求,也可以写入操作命令字OCW来改变某些中断管理方式
操作命令字可以随时写入、修改,但初始化命令字一经写入一般不再改动。
当初始化完成后工作期间是这样区分三种OCWs的: OCW1写入奇端口,OCW2和OCW3写入偶端口,所以OCW2和OCW3可以和OCW1区分开;而 OCW2和OCW3的D3 位不同,所以二者又被区分开
OCW1
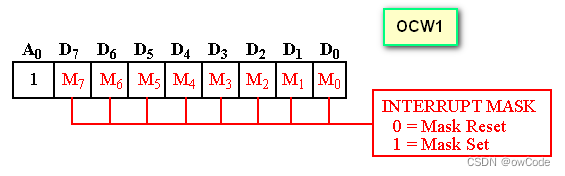
Linux0.12代码setup.S中8259的主从芯片都写入了0xFF,屏蔽所有中断请求!
OCW2 OCW3
略。。。可以参考这篇