论文阅读【时间序列】DSformer
arxive: DSformer: A Double Sampling Transformer for Multivariate Time Series Long-term Prediction
github: MTST
分类:多变量时间序列(Multivariate time series)
核心观点
多变量时间序列3个维度信息
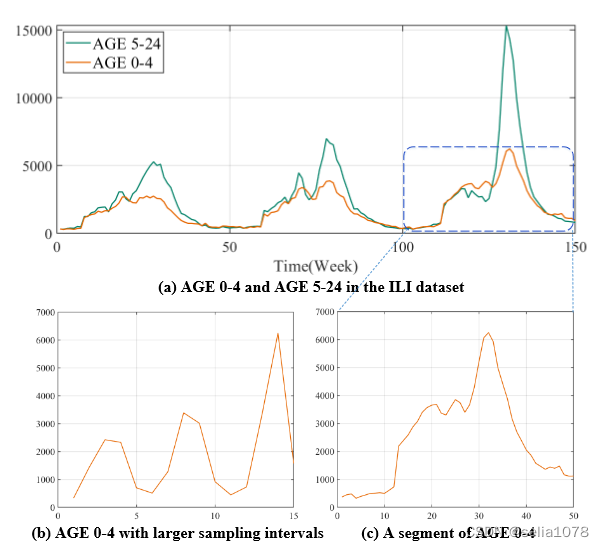
- 变量间关联(Variable correlation):如Fig. 1(a)所示,不同变量具有相似的变化趋势 → \rightarrow →
Variable Attention - 全局信息(Global information):如Fig. 1(b)所示,从全局来看,序列显示出一定的周期性 → \rightarrow →
Down Sampling - 局部信息(Local information):如Fig. 1©所示,局部信息 → \rightarrow →
Piecewise Sampling
个人观点:全局信息更多指周期项,局部信息更多指趋势项
整体框架
| 符号 | 含义 |
|---|---|
| N | 变量数 |
| H | 输入序列长度 |
| L | 输出序列长度 |
| C | 切分子序列数量 |
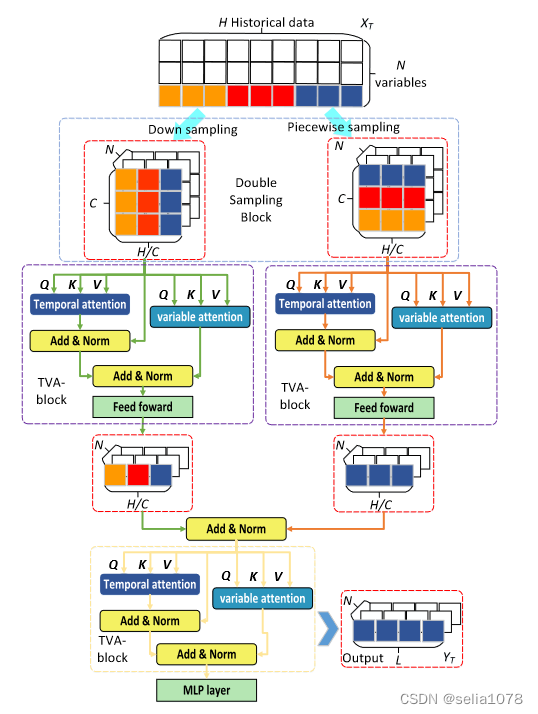
N 为变量数,H为输入序列长度,C是切分子序列的数量。
输入序列 X ∈ R N ∗ H X \in R^{N*H} X∈RN∗H,经过Down sampling得到 X d s ∈ R N ∗ C ∗ H C X_{ds} \in R ^{N * C * \frac{H}{C}} Xds∈RN∗C∗CH,经过Picewise Sampling得到 X p s ∈ R N ∗ C ∗ H C X_{ps} \in R ^{N * C * \frac{H}{C}} Xps∈RN∗C∗CH。
在TVA-block中进行Variable Attention和Temporal Attention。其中Temporal Attention中 Q ∈ R N ∗ C ∗ H C Q \in R ^{N * C * \frac{H}{C}} Q∈RN∗C∗CH, K ∈ R N ∗ H C ∗ C K \in R ^{N * \frac{H}{C} *C} K∈RN∗CH∗C;Variable Attention中 Q ∈ R H C ∗ C ∗ N Q \in R ^{\frac{H}{C} * C * N} Q∈RCH∗C∗N, K ∈ R ∗ H C ∗ N ∗ C K \in R ^{ * \frac{H}{C} *N *C} K∈R∗CH∗N∗C。
Temporal Attention是子序列之间,通过比较同一变量子序列的相似度计算注意力,Variable Attention是不同子序列之间,通过比较同一位置各个变量的相似度计算注意力。
随后,Temporal Attention和Variable Attention输出 X ′ ∈ R N ∗ C ∗ H C X' \in R ^{N * C * \frac{H}{C}} X′∈RN∗C∗CH被FFN压缩成 X ′ ∈ R N ∗ H C X' \in R ^{N * \frac{H}{C}} X′∈RN∗CH,然后相加。
最后,经过一个TVA-block整理来自不同视角的信息(Down sampling和Picewise Sampling)和MLP得到输出。
采样过程
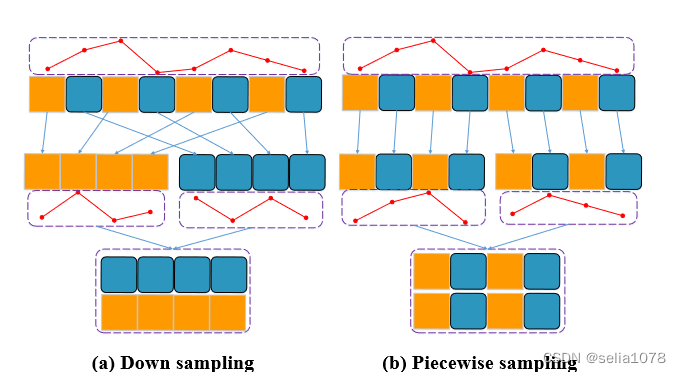
两种采样方式的区别在于如何将切分后的子序列重新排列。
- Down Sampling: 每隔几个点取一个,用来捕获全局信息
X d s j = x j , x j + H C , x j + 2 ∗ H C , . . . , x j + ( C − 1 ) ∗ H C X^j_{ds} = x_j, x_{j+\\frac{H}{C}}, x_{j+2\*\\frac{H}{C}},..., x_{j+(C-1)\*\\frac{H}{C}} Xdsj=xj,xj+CH,xj+2∗CH,...,xj+(C−1)∗CH - Piecewise Sampling:
X p s j = x 1 + ( j − 1 ) ∗ C , x 2 + ( j − 1 ) ∗ C , x 3 + ( j − 1 ) ∗ C , . . . , x j ∗ C X^j_{ps} = x_{1+(j-1)\*C}, x_{2+(j-1)\*C}, x_{3+(j-1)\*C},..., x_{j\*C} Xpsj=x1+(j−1)∗C,x2+(j−1)∗C,x3+(j−1)∗C,...,xj∗C
TVA block
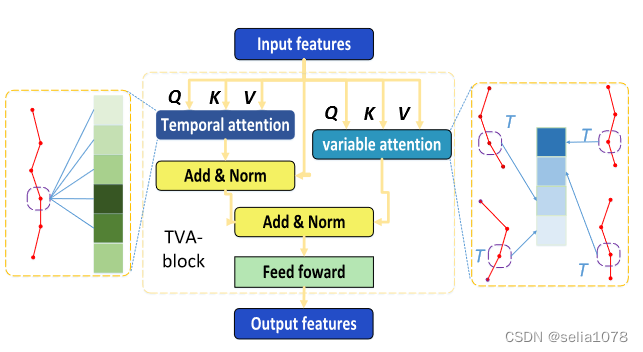
两种attention的主要区别在于X的维度变化:
- Temporal Attention: Q ∈ R N ∗ C ∗ H C Q \isin R^{N * C * \frac{H}{C}} Q∈RN∗C∗CH, K ∈ R N ∗ H C ∗ C K \isin R^{N * \frac{H}{C} * C} K∈RN∗CH∗C
- Variable Attention: Q ∈ R H C ∗ C ∗ N Q \isin R^{ \frac{H}{C} * C * N} Q∈RCH∗C∗N, K ∈ R H C ∗ N ∗ C K \isin R^{ \frac{H}{C} * N * C} K∈RCH∗N∗C