在VTK中,面绘制 (Surface Rendering)和体绘制(Volume Rendering)是两种常见的三维数据可视化方法。面绘制和体绘制是计算机图形学中用于三维数据可视化的重要技术,尤其在医学成像、科学可视化和计算机辅助设计等领域应用广泛。
下面是对这两种技术的介绍:
面绘制(Surface Rendering)
面绘制是一种基于表面的三维数据可视化方法。它首先需要从三维数据集中识别并提取出感兴趣的表面,通常是通过等值面 (isosurface)提取算法,比如Marching Cubes 算法。
一旦提取出表面,就可以使用传统的计算机图形学技术(如OpenGL)来渲染这个表面,包括光照 、纹理映射 和阴影 等效果。
特点:
**快速渲染:**因为只处理表面数据,所以面绘制通常比体绘制更快 。
**有限的内部信息:**只能显示表面特征 ,无法显示体数据内部的细节。
依赖于等值面提取:算法的选择 和参数设置 影响最终的可视化效果。
体绘制(Volume Rendering)
体绘制则是直接对三维体数据进行可视化,无需先提取表面 。
它将整个体积数据集视为渲染的对象,通过对体数据的每个体素 (volume pixel)进行采样和着色,然后将这些采样结果合成到最终图像中。体绘制可以采用不同的技术,如最大强度投影(Maximum Intensity Projection, MIP)、最小强度投影(Minimum Intensity Projection, MinIP)、平均强度投影(Average Intensity Projection, AIP)、光线投射(Ray Casting)等。
体绘制非常适合于分析复杂的内部结构,如医学成像中的组织结构。
特点:
**完整的内部细节:**可以显示体数据内部 的复杂结构和细节。
更复杂的渲染过程: 由于处理的是所有体数据,体绘制通常比面绘制慢 ,但随着GPU加速技术的发展,实时体绘制已成为可能。
**透明度控制:**通过调整体数据的不透明度,可以观察到不同层的结构。
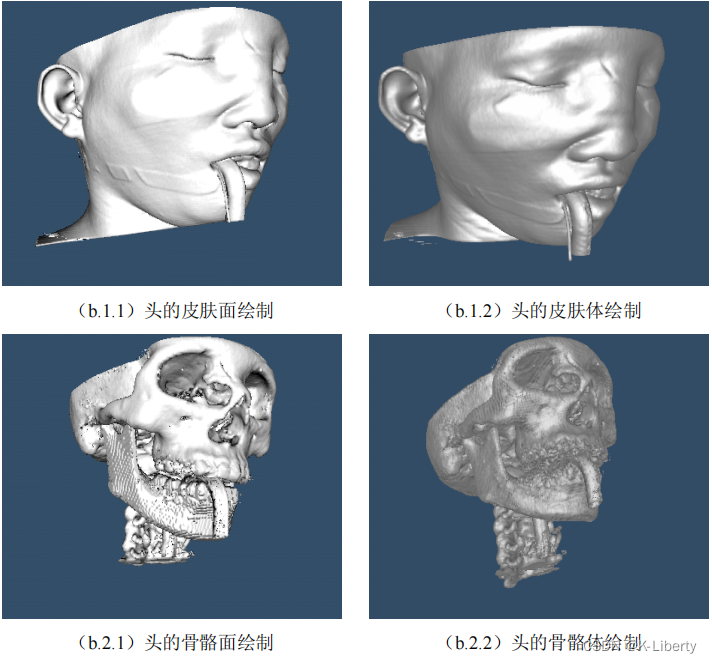
头部 CT 面绘制和体绘制效果图
面绘制与体绘制的区别
面绘制最大的特点是需要先对二维数据场进行三维重建,生成体数据等值面的曲面表示,再用光照模型计算出绘制图像。常用的三维重建方法有:Marching Cubes,Surface Tracking等。Marching Cuhes方法提出一种精确定义体素及其体素内等值面的生成方法,随后又有很多人在它的基础上进行研究,如今已经成为最流行的三维重建方法,在许多商业软件中也有应用。
Marching Cubes(MC)算法是面绘制算法中的经典算法。
面绘制法将感兴趣的部分以等值面 的方式抽取出来,便于利用真实感技术生成高质量的图像,使研究人员可以方便地进行观察和分析。这种绘制方法速度快,适合于实时性 要求高的情形。比如交互操作、图像引导手术等。
体绘制则放弃了传统方法中 体由面构造这一约束,采用体绘制光照模型直接从三维体数据中绘制各类物理量的分布情况。
体绘制是直接处理数据集中所有的体素,在每一个体素中设置了不同的透明度 和颜色值 ,当光线穿透过三维数据场时,不同体素对光线的透射和发射强度不同,可以不显示不感兴趣的区域,从而达到成像的结果。
等值面 、等势面 等体数据的几何面表示方法,是研究者为了适应图形显示,人为提出的一种体数据表示形式。体绘制放弃这一做法,将三维体数据中的体素看成一个半透明物质,并赋予其一定的颜色和阻光度,由光线穿过整个数据场,进行颜色合成,得到最终的绘制结果。
常用的体绘制算法有光线投影法 、频域体绘制算法 、抛雪球算法 、足迹算法 、错切-变形算法 等。光线投影算法 (Ray Casting)是体绘制算法中最经典的方法。
医学图像的三维重建方法大体可分为两类,一类是面绘制方法,另一类是体绘制方法。面绘制方法本质上就是等值面的拼接或者拟合,典型的算法有移动立方体法(Marching Cubes)。而体绘制是以体素为基本单元利用光学原理成像的,典型的算法有光线投射法(Ray Casting)。
VTK软件包提供了这两种算法的实现。