松灵机器人scout mini小车 自主导航
最近实验室来了个松灵机器人scout mini的底座。本着学习的目的对其进行了研究,从最基础的连接开始。
1.硬件连接准备
松灵scout mini提供了航空插头用于can串口转USB的操作。

将通讯航空插头连接到小车对应插口。然后将CAN线引出,将CAN线中的CAN_H和CAN_L分别与CAN_TO_USB适配器相连。然后打开scout mini移动机器人底盘开关,将CAN_TO_USB连接到笔记本的usb口。
具体连接方式如下图所示:

注意:一根usb to can线300 money,用的时候要小心保护
2.测试硬件与CAN通讯
设置CAN_TO_USB对应适配器,检测是否连接成功
1.启动gs_usb 内核模块
sudo modprobe gs_usb2.设置500k波特率适配
sudo ip link set can0 up type can bitrate 500000 3.如果前面没有出现错误,可以使用命令ifconfig -a查看can设备
ifconfig -a 4.安装并使用can-utils来测试硬件
sudo apt install can-utils5。使用命令监听小车底盘数据
candump can0如果前面都没有错,且小车打开状态,执行完candump can0后会源源不断收到小车底盘反馈的数据。
如果出现错误,拔插一下重新运行命令。
3. ROS功能包测试
松灵机器人提供了对应的ROS功能包用于二次开发。可以通过ROS依赖包直接对小车底盘进行控制。
3.1.下载ROS相关依赖
首先需要根据自己的ROS版本安装对应的依赖,我的是ubuntu18,对应的ROS为melodic
#根据自己ROS版本更改命令
sudo apt install ros-melodic-controller-manager
sudo apt install ros-melodic-joint-state-publisher-gui
sudo apt install -y libasio-dev3.2. 新建工作空间
新建工作空间,将代码包复制到新建工作空间下的src目录。然后进行编译
mkdir -p scout_ws/src
cd scout_ws/src
git clone --recursive https://github.com/agilexrobotics/ugv_sdk.git
git clone https://github.com/agilexrobotics/scout_ros.git
cd ..
catkin_make3.3 键盘控制小车移动
在测试完硬件与CAN连接成功后,松灵官方提供了键盘控制小车移动指令
连接电脑usb和小车后,打开电源,运行下面命令:
#1)连接设备
sudo ip link set can0 up type can bitrate 500000
#2)测试接受数据
candump can0
#3)运行小车底盘的ros节点 base
cd scout_ws/
source devel/setup.bash
roslaunch scout_bringup scout_mini_robot_base.launch
#4)运行键盘控制节点
source devel/setup.bahs
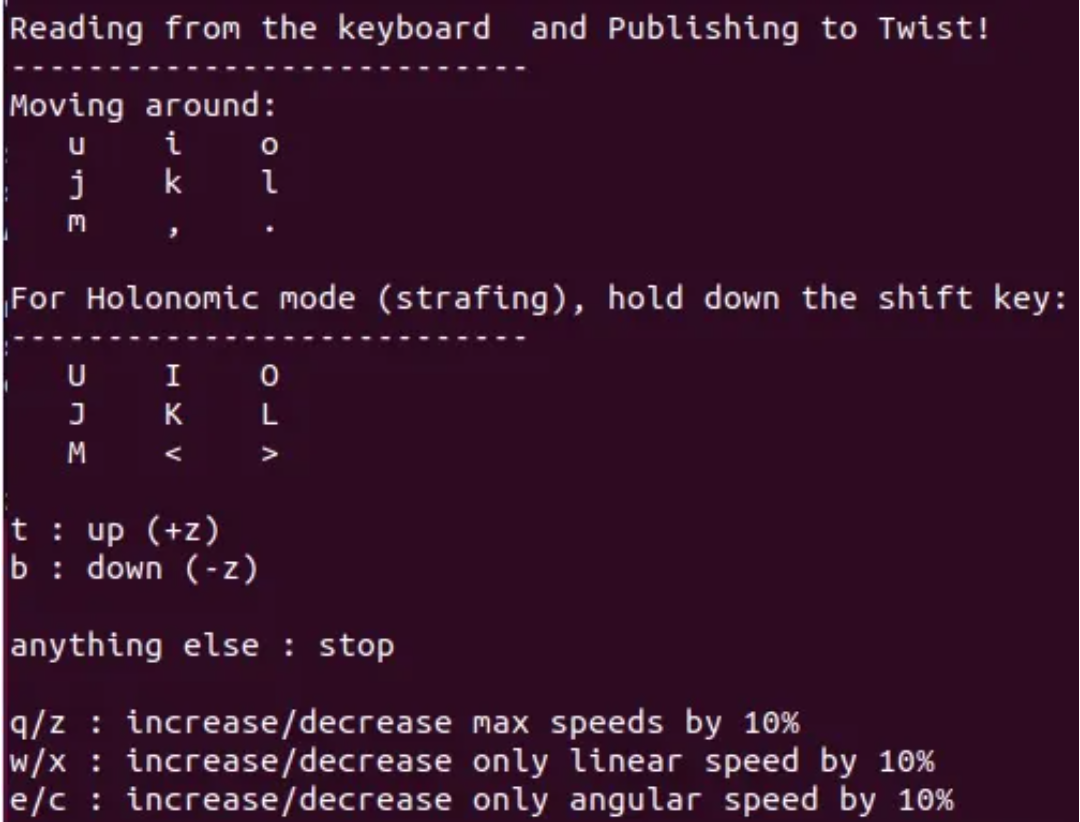
roslaunch scout_bringup scout_teleop_keyboard.launch注意:建议先用z将小车速度降低到可控范围内,并打开遥控器确保随时接手控制防止发生碰撞。再运行节点命令
终端的控制界面如下所示: