Foundations of Spatial Perception for Robotics: Hierarchical Representations and Real-Time Systems
项目代码:Hydra
论文链接:https://arxiv.org/pdf/2305.07154
Hydra-ROS
在当今机器人领域,一个核心挑战是如何让机器人不仅看到环境,还能真正理解环境。传统的SLAM系统能创建精确的几何地图,却无法理解"厨房在哪里"或"桌子上的水杯"这类概念。最近,MIT SPARK实验室发表了一篇开创性论文《Foundations of Spatial Perception for Robotics: Hierarchical Representations and Real-Time Systems》,提出了一个突破性的解决方案:层次化3D场景图。这篇博客将深入解析这一研究的核心思想、理论基础与创新实现。
1. 为什么层次化表示如此重要?
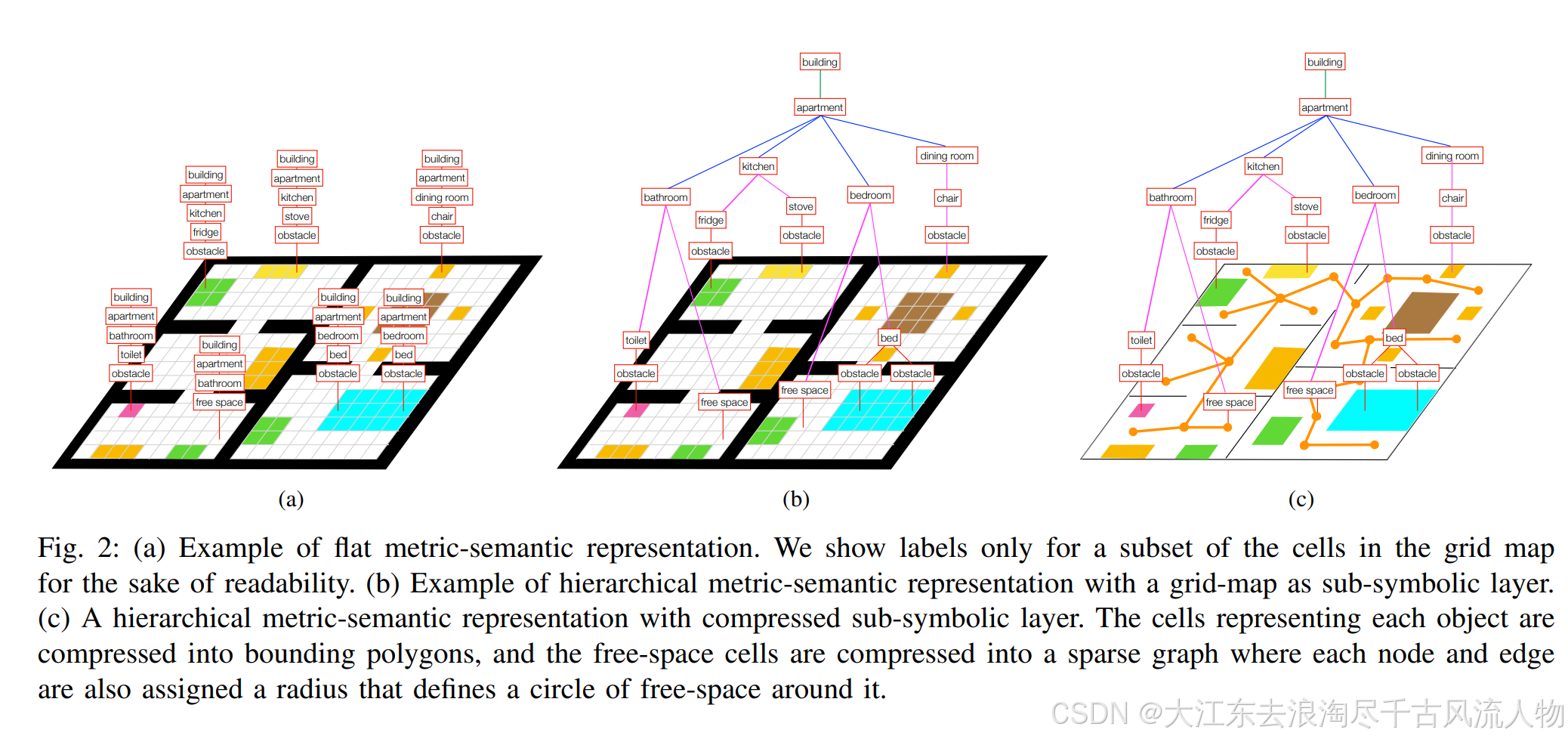
论文首先指出,传统的"扁平"度量-语义表示在大型环境中面临严重的可扩展性问题。考虑一个使用体素网格表示的3D环境,如果每个体素需要存储L个语义标签,所需内存为:
m = O ( L c d o t V / d e l t a 3 ) m = O(L cdot V/delta^3) m=O(LcdotV/delta3)
其中V是场景体积, δ δ δ是体素大小。当映射大型环境时, V / d e l t a 3 V/delta^3 V/delta3会迅速变得不可持续。例如,以10厘米分辨率覆盖 10 k m × 10 k m 10km×10km 10km×10km区域,即使不考虑垂直维度,也需要 10 10 10^{10} 1010个体素!
层次化表示则通过智能组织信息大幅减少内存需求:
m = O ( N s u b − s y m + N o b j e c t s + N r o o m s + l d o t s + N b u i l d i n g s ) m = O(N_{sub-sym} + N_{objects} + N_{rooms} + ldots + N_{buildings}) m=O(Nsub−sym+Nobjects+Nrooms+ldots+Nbuildings)
其中 N s u b − s y m N_{sub-sym} Nsub−sym是压缩后的子符号表示大小, N l a y e r N_{layer} Nlayer是每个层次的符号数量。关键是,这种表示将符号数量与子符号表示大小解耦,实现了显著的内存节省。
2. 关键理论突破:小树宽与高效推理
论文的一个核心贡献是证明层次化图具有小树宽(small treewidth)。树宽是图复杂度的关键度量,直接影响推理效率。论文证明,l层层次化图G的树宽受其子图树宽限制:

t w G l e q m a x m a x t w G \[ C ( v ) ] + 1 , t w G \[ V l ] twG leq max{max{twG\[C(v)]+1}, twG\[V_l]} twGleqmaxmaxtwG\[C(v)]+1,twG\[Vl]
其中 C ( v ) C(v) C(v)是节点v的子节点集合, V l V_l Vl是顶层节点集合。这意味着层次化图的树宽不随环境大小增长,而是受限于每个层次内的局部复杂度。
对于室内3D场景图,论文进一步证明:
- 房间层树宽不超过2(假设每个房间最多连接两个有门的其他房间)
- 对象-房间-建筑图的树宽为: t w G l e q 1 + N o twG leq 1 + N_o twGleq1+No
其中 N o N_o No是一个房间中的最大对象数量
这一理论保证使高效的概率推理和机器学习成为可能,为后续的算法设计奠定基础。
3. 3D场景图:为机器人构建"心智模型"
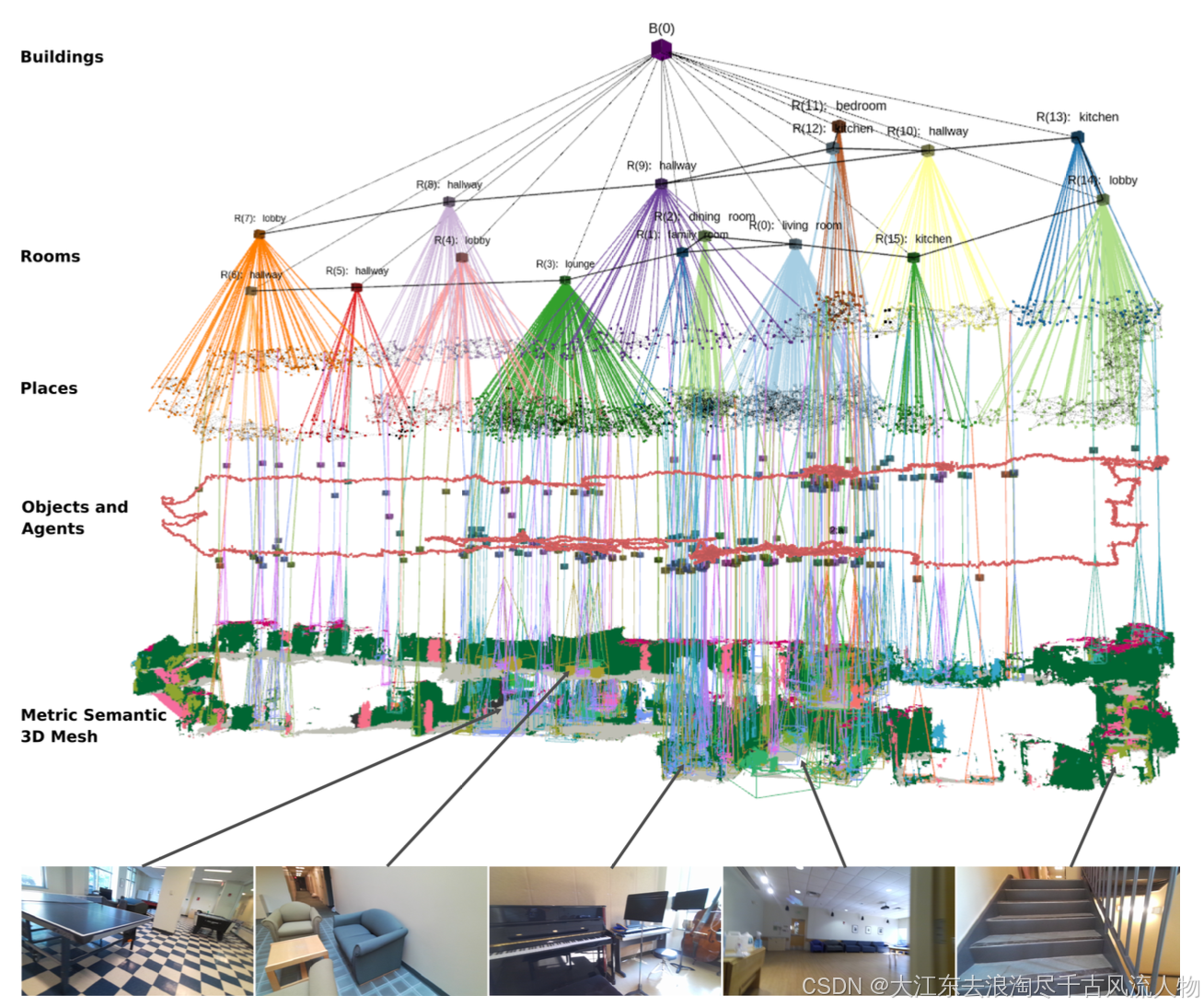
论文提出的3D场景图是一种层次化表示,包含5个层次(从底到顶):
- 度量-语义3D网格:描述环境几何与基础语义
- 对象和智能体层:识别环境中物体和移动实体
- 位置(places)层:表示自由空间的拓扑连接
- 房间层:语义化空间分割
- 建筑层:最高层次的环境抽象
这种结构模拟了人类如何理解和记忆环境:我们不会记住每个像素,而是记住关键对象、它们之间的关系以及空间层次结构。
实时构建3D场景图的突破性算法
构建这样的层次化表示需要解决多个技术挑战。论文提出了完整的算法框架,核心创新包括:
- 使用持久同调(Persistent Homology)进行房间分割
传统房间分割方法依赖于2D平面假设或处理整个体素地图,计算效率低下。论文创新性地将拓扑数据分析应用于位置图:
- 通过"膨胀"障碍物(移除半径小于δ的位置节点),环境自然分割成不同连通分量
- 使用过滤(filtration)概念,在不同膨胀尺度上分析连通分量数量
- 通过Betti曲线(连通分量数量随膨胀距离的变化)找到最持久(persistent)的分割
这种方法自动确定最佳膨胀距离,无需硬编码参数,适用于各种建筑类型。
- 神经树(Neural Tree)实现高效房间分类
识别房间类型(如厨房、卧室)是语义理解的关键。论文利用对象与房间的层次关系,采用创新的神经树架构:
- 与传统GNN在原始图上进行消息传递不同,神经树在H-tree(由输入图构造的树状结构)上操作
- 利用3D场景图的小树宽特性,高效构建H-tree
- 消息传递在树结构上更加高效,支持实时推理
这种架构在保持高准确性的同时,显著降低了计算复杂度,使嵌入式系统上的实时运行成为可能。
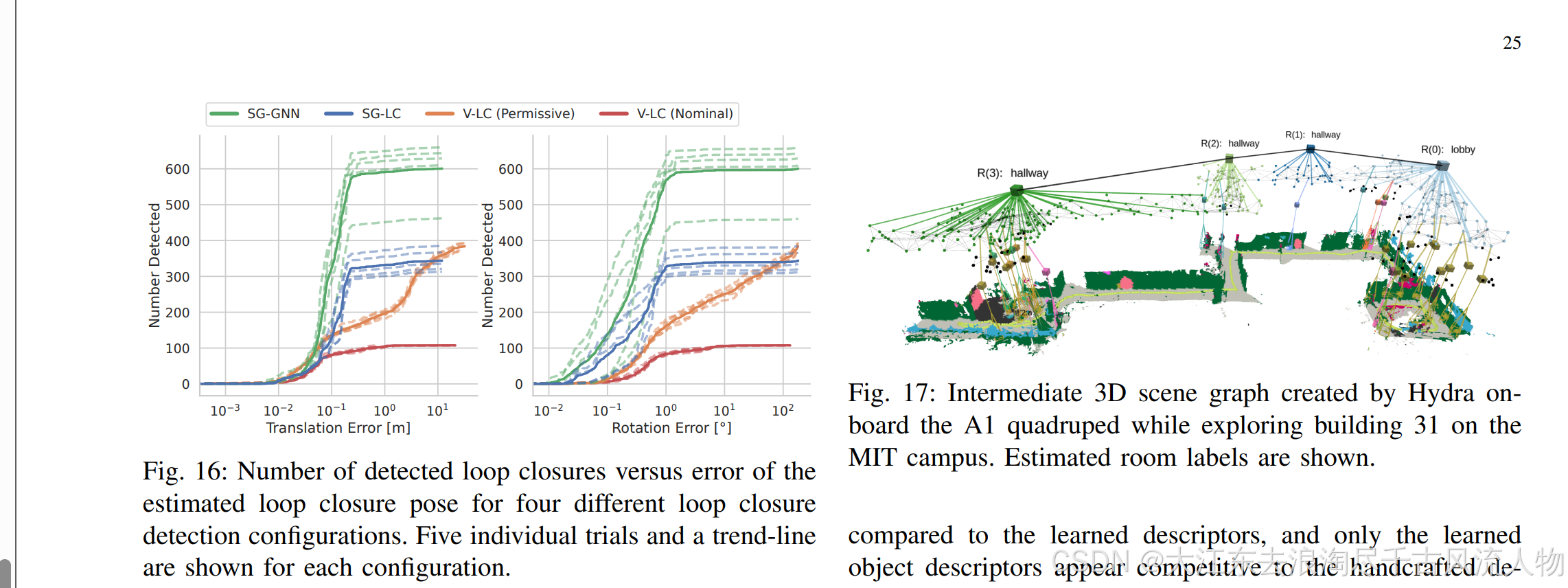
- 层次化闭环检测与全局优化
为构建持久地图,系统需识别之前访问过的位置并校正累积误差:
- 自上而下的闭环检测:使用层次化描述符(捕获场景图各层统计信息)快速检索候选匹配
- 自下而上的几何验证:通过精确配准验证候选匹配
- 全局优化:使用嵌入变形图(embedded deformation graphs)同时校正场景图所有层次(3D网格、对象、位置和机器人轨迹)
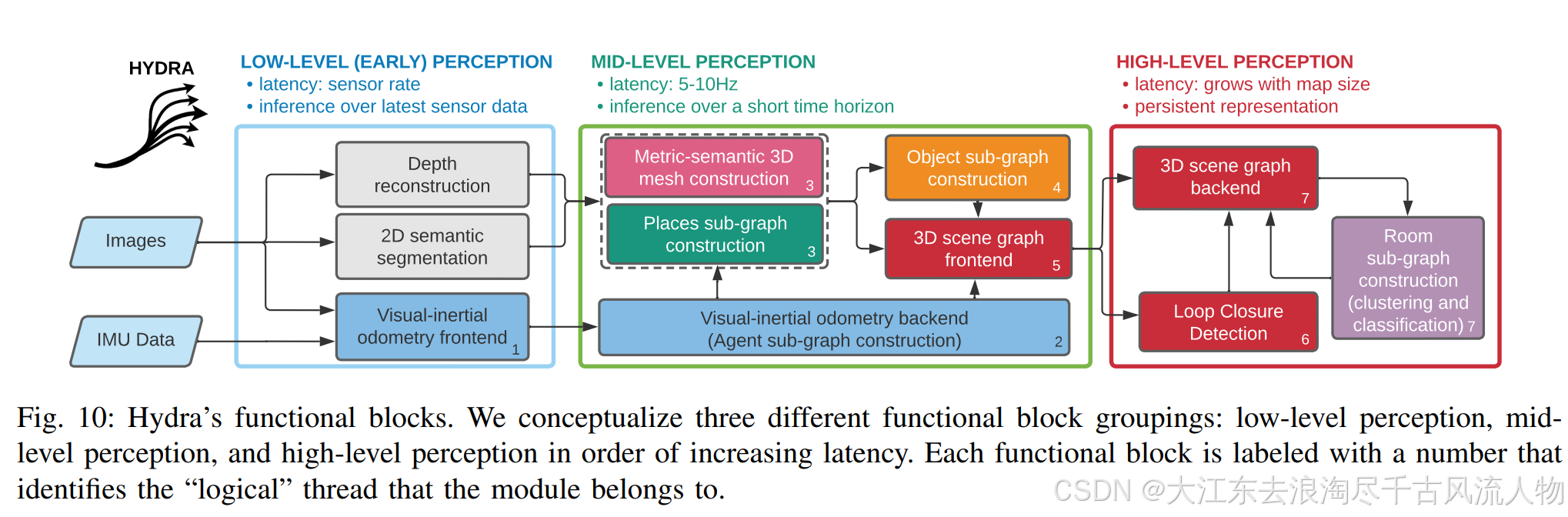
4. Hydra:首个实时层次化空间感知系统
所有这些算法被集成为一个名为Hydra的高度并行系统,特点是:
- 结合快速低级处理(局部建图)与较慢高级推理(全局优化)
- 在单个GPU上实现实时性能
- 处理从传感器数据到层次化表示的完整流程
评估结果令人印象深刻:
- 在大型真实环境中实时构建3D场景图
- 在线算法达到与批处理离线方法相当的精度
- 层次化闭环检测在质量和数量上优于传统词袋和视觉特征匹配方法
- 在Clearpath Jackal和Unitree A1等真实机器人平台上验证
5. 为什么这项工作如此重要?
- 理论基础:首次正式证明层次化表示对可扩展机器人感知的必要性
- 桥接经典与现代:将传统几何SLAM与神经符号推理无缝集成
- 效率突破:解决长期存在的实时性能问题,使层次化表示适用于实际机器人
- 新架构:提出神经树等新型GNN架构,为几何深度学习开辟新方向
6. 未来展望
这项工作为机器人空间AI设定了新标准。未来,我们可以期待:
- 扩展到室外和城市规模环境
- 整合更多语义概念和关系
- 与任务规划和人机交互更紧密结合
- 在自主车辆、家庭服务机器人和工业自动化中广泛应用
正如论文所展示的,理解空间不仅是关于"在哪里",更是关于"是什么"和"如何关联"。通过层次化表示,机器人正逐步接近人类级别的环境理解能力。