前言
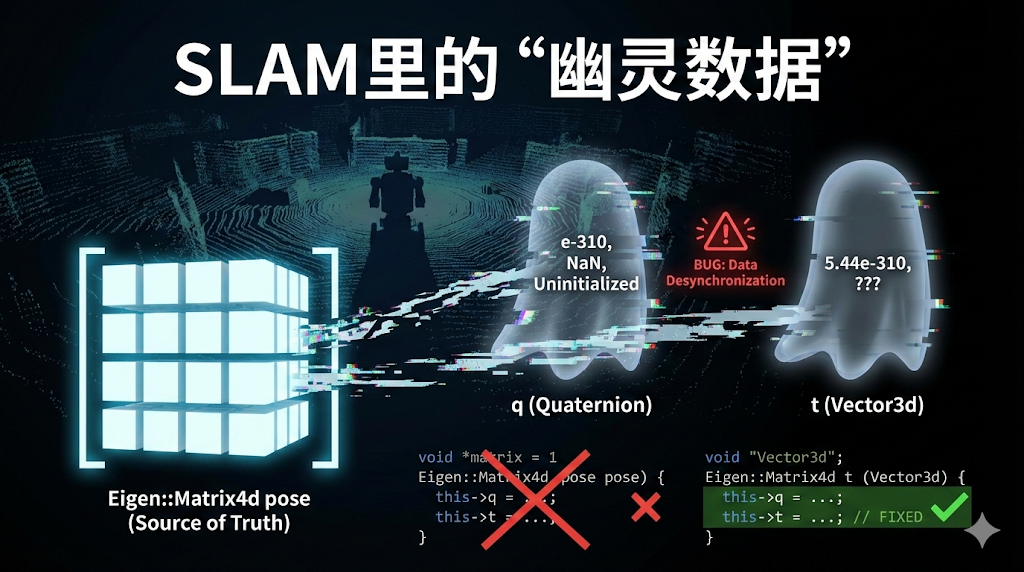
在开发 LiDAR SLAM 系统时,因为 PoseT 类的一个构造函数疏忽,导致里程计(Odometry)输出出现了极其诡异的 e-310 量级数值。本文将复现这个由"数据冗余"引发的 Bug,探讨 C++ 中"单一数据源"的重要性,并深入剖析拷贝构造函数在 Eigen 类型成员中的正确用法。
1. 案发现场:诡异的 e-310
在调试 robust_lidarslam 项目的里程计模块时,我发现了一个奇怪的现象。虽然算法逻辑看似正确,但在日志中,当前帧的位姿(Pose)打印出来却是这样的:
bash
INFO .../lidar_odometry.cpp : Current Pose: t(xyz) = 5.44091e-310 5.44091e-310 6.51858e-310, q(wxyz) = 6.51858e-310 ...e-310 是一个典型的"非正常"数值,通常意味着读取了未初始化的内存(或者接近 double 的精度下限)。
1.1 问题代码复现
我的 PoseT 类定义如下(简化版):
cpp
class PoseT {
public:
// 成员变量
Eigen::Matrix<double, 4, 4> pose; // 变换矩阵
Eigen::Quaternion<double> q; // 旋转四元数
Eigen::Matrix<double, 3, 1> t; // 平移向量
// 出问题的构造函数
PoseT(double x, double y, double z, double roll, double pitch, double yaw) {
this->pose = Eigen::Matrix4d::Identity();
// ... 省略繁琐的三角函数计算 ...
// 计算出了 pose(0,0) ... pose(3,3)
// !!!唯独忘记了给 this->q 和 this->t 赋值!!!
}
std::string print() const {
std::ostringstream oss;
// 打印时使用的是 q 和 t,而不是 pose
oss << "t=" << t.transpose() << ", q=" << q.coeffs().transpose();
return oss.str();
}
};1.2 原因分析
这是一个典型的 数据同步(Data Synchronization) 问题:
-
构造函数逻辑缺失 :在
PoseT(x,y,z,r,p,y)构造函数中,我辛辛苦苦计算了this->pose矩阵,但完全忘记了同步更新this->q和this->t。 -
打印逻辑偏差 :
print()函数依赖q和t进行输出。 -
未定义行为:在 C++ 中,成员变量如果没有显式初始化,其内存中的值是未定义的(垃圾值)。
2. 核心反思:数据冗余 vs. 单一数据源
这个 Bug 的根源不在于忘记写那两行代码,而在于类设计模式。
2.1 陷阱:数据冗余 (Data Redundancy)
在我的类中,pose (4x4矩阵) 包含了完整的旋转和平移信息。同时,我又维护了 q 和 t。
-
优点 :获取
q或t时不需要计算,速度快。 -
缺点 :必须时刻保持同步 。只要有一个函数只改了
pose没改q(或者反过来),Bug 就诞生了。
2.2 最佳实践:单一数据源 (Single Source of Truth)
对于 Pose 这种数学类,除非性能瓶颈极度苛刻(例如在每秒调用百万次的内循环中),否则不建议缓存冗余数据。
改进方案 :只存储 pose,需要 q 和 t 时即时计算。
3. 解决方案
方案 A:快速修复(Patch)
如果不改变类结构,必须在构造函数中补全赋值:
cpp
PoseT::PoseT(double x, double y, double z, double roll, double pitch, double yaw) {
this->pose = Eigen::Matrix4d::Identity();
// ... 填充 pose ...
// 【新增】必须手动同步!
this->t << x, y, z;
this->q = Eigen::Quaterniond(this->pose.block<3,3>(0,0));
}方案 B:重构设计(推荐)
修改 PoseT 类,删除 q 和 t 成员变量,确保存储的唯一性。
cpp
// poseT.h
class PoseT {
private:
Eigen::Matrix4d pose; // 唯一的数据源
public:
// 构造函数只负责填充 pose
PoseT(double x, double y, double z, double roll, double pitch, double yaw) {
// ... 计算并填充 pose ...
}
// Getter:即时计算,保证数据永远一致
Eigen::Vector3d GetXYZ() const {
return pose.block<3,1>(0,3);
}
Eigen::Quaterniond GetQ() const {
return Eigen::Quaterniond(pose.block<3,3>(0,0));
}
// print 函数直接从 pose 读取
std::string print() const {
Eigen::Vector3d t = GetXYZ();
Eigen::Quaterniond q = GetQ();
// ... 打印 t 和 q ...
}
};4. 深度辨析:拷贝构造函数 (Copy Constructor)
在社区中经常看到大家纠结:"我自定义的类包含 Eigen 成员,需要手写拷贝构造函数吗?"
4.1 什么时候需要拷贝构造函数?
C++ 的 Rule of Three (or Five) 告诉我们,只有当你管理原始资源(Raw Resource)时才需要自定义拷贝构造函数。例如:
-
手动
new出来的指针(需要深拷贝)。 -
打开的文件句柄、Socket 连接。
4.2 Eigen 成员需要吗?
不需要。 Eigen 的矩阵和四元数类内部已经妥善处理了内存管理。它们表现得像"值类型"(Value Type)。
-
默认行为 :编译器生成的默认拷贝构造函数会执行 Member-wise Copy(逐成员拷贝)。
-
效果 :对于
Eigen::Matrix,这就是深拷贝(数据会被完整复制)。
4.3 为什么你的代码里不需要?
如果你手写了拷贝构造函数(如下所示),反而容易出锅:
cpp
// 糟糕的手写版本
PoseT::PoseT(const PoseT &other) {
this->pose = other.pose;
// 如果你以后给 PoseT 加了个新成员 double timestamp;
// 你很可能忘记回来改这个函数,导致 timestamp 没被拷贝!
}结论 :直接使用编译器默认生成的版本,或者显式声明 default:
cpp
PoseT(const PoseT&) = default;
PoseT& operator=(const PoseT&) = default;5. 延伸知识点:Eigen 的内存对齐陷阱
既然谈到了 PoseT 的设计,不得不提一个在 SLAM 开发中极易崩溃的点:内存对齐。
如果你的 PoseT 类中包含固定大小的 Eigen 成员(如 Eigen::Matrix4d, Eigen::Vector4d),在 x86 架构下,为了利用 SSE/AVX 指令集加速,Eigen 要求这些成员在内存中 16 字节或 32 字节对齐。
潜在 Crash
如果你使用 std::vector<PoseT> 或者 new PoseT(),可能会因为内存未对齐导致程序直接崩溃(Segfault)。
解决方法
在类定义的 public 区域加上宏:
cpp
class PoseT {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW // <--- 加上这一行
Eigen::Matrix4d pose;
// ...
};注:C++17 之后,标准库的内存分配器已经基本解决了这个问题,但在 C++14 及以下环境中,这个宏是救命的。
6. 总结
-
数据一致性 :类设计中尽量避免存储多份表达同一物理意义的数据。若必须存储,请务必在所有构造函数和 Setter 中同步更新。
-
拷贝构造 :对于由 Eigen、STL 容器组成的类,不要手写拷贝构造函数,相信编译器的默认行为。
-
调试技巧 :看到
e-310或nan,第一反应应当是"未初始化"或"除以零"。
希望这篇复盘能帮大家避开 SLAM 算法落地过程中的那些"坑"!Happy Coding!