概述
OAK FFC 主控板和多种可选配镜头模组非常适合灵活的搭建您的3D人工智能产品原型。由于镜头是分体式的,因此你可以根据需要测量的距离,自定义深度相机安装基线,并根据你的项目要求(分辨率、快门类型、FPS、光学元件)选择镜头模组。
OAK FFC 主控板
OAK FFC主控板具有板载 VPU 并具有外置的 FFC 连接器的 OAK 设备,你可以将 OAK FFC 相机模块连接到这些连接器。此外,它们还公开了 串口,GPIO口等外部接口,因此可以进一步扩展。
以下是我们当前的 OAK FFC 主控板列表:

FFC镜头模组
以下是可以选配的 OAK FFC 相机模组,你可以使用软排线轻松将其连接到任OAK FFC 主板上,我们后期会努力提供更多支持的 OAK FFC 相机模组。
| FFC相机模组 | 快门 | 分辨率 | 备注 |
|---|---|---|---|
| OAK-FFC-IMX378 (AF) | 卷帘快门 | 12 MP | 彩色,自动对焦 |
| OAK-FFC-IMX378-FF | 卷帘快门 | 12 MP | 彩色,定焦 |
| OAK-FFC-IMX378-W | 卷帘快门 | 12 MP | 彩色、定焦、广角 |
| OAK-FFC-OV9282 | 全局快门 | 1 MP | 单色,定焦 |
| OAK-FFC-OV9282-M12 | 全局快门 | 1 MP | 单色,M12 接口 |
| OAK-FFC-OV9282-W | 全局快门 | 1 MP | 单色、定焦、广角 |
| OAK-FFC-OV9782-M12 | 全局快门 | 1 MP | 彩色,M12 接口 |
| OAK-FFC-OV9782-W | 全局快门 | 1 MP | 彩色、定焦、广角 |
| OAK-FFC IMX582 | 卷帘快门 | 32 MP | 彩色,自动对焦 |
| OAK-FFC-IMX577-M12 | 卷帘快门 | 12 MP | 彩色,M12 接口 |
| OAK-FFC-IMX214-W | 卷帘快门 | 13 MP | 彩色、定焦、广角 |
| OAK-FFC-AR0234-M12 | 全局快门 | 2.3 MP | 彩色,M12 接口 |
| OAK-FFC-IMX462 (M12) | 卷帘快门 | 2 MP | 彩色,定焦 |
| Arducam HQ Cam for RPi, IMX477 | 卷帘快门 | 12.3 MP | 彩色,CS卡口镜头 |
Raspberry Pi 摄像头模块
树莓派官方销售的一些镜头模组可以和OAK FFC主控板兼容。RPi相机可以通过RPi相机适配器连接到OAK FFC主控板上。
| RPi 摄像头模块 | 传感器 | 快门 | 像素 | 备注 |
|---|---|---|---|---|
| RPi 摄像头模块3 | IMX708 | 卷帘快门 | 12 MP | 彩色,自动对焦。初始 (WIP) 集成 |
| RPi 摄像头模块 2 | IMX219 | 卷帘快门 | 8 MP | 彩色,定焦。需要 imx219 分支 |
| RPi 高品质相机 | IMX477 | 卷帘快门 | 12 MP | 彩色,C/CS 卡口 |
| RPi全局快门相机 | IMX296 | 全局快门 | 1.6 MP | 彩色,C/CS 卡口 |
如果您只想使用 IMX477,我们建议使用 Arducam HQ Cam for RPi,IMX477可直接与 OAK FFC 主控板配合使用(不带 UC-244 适配器)
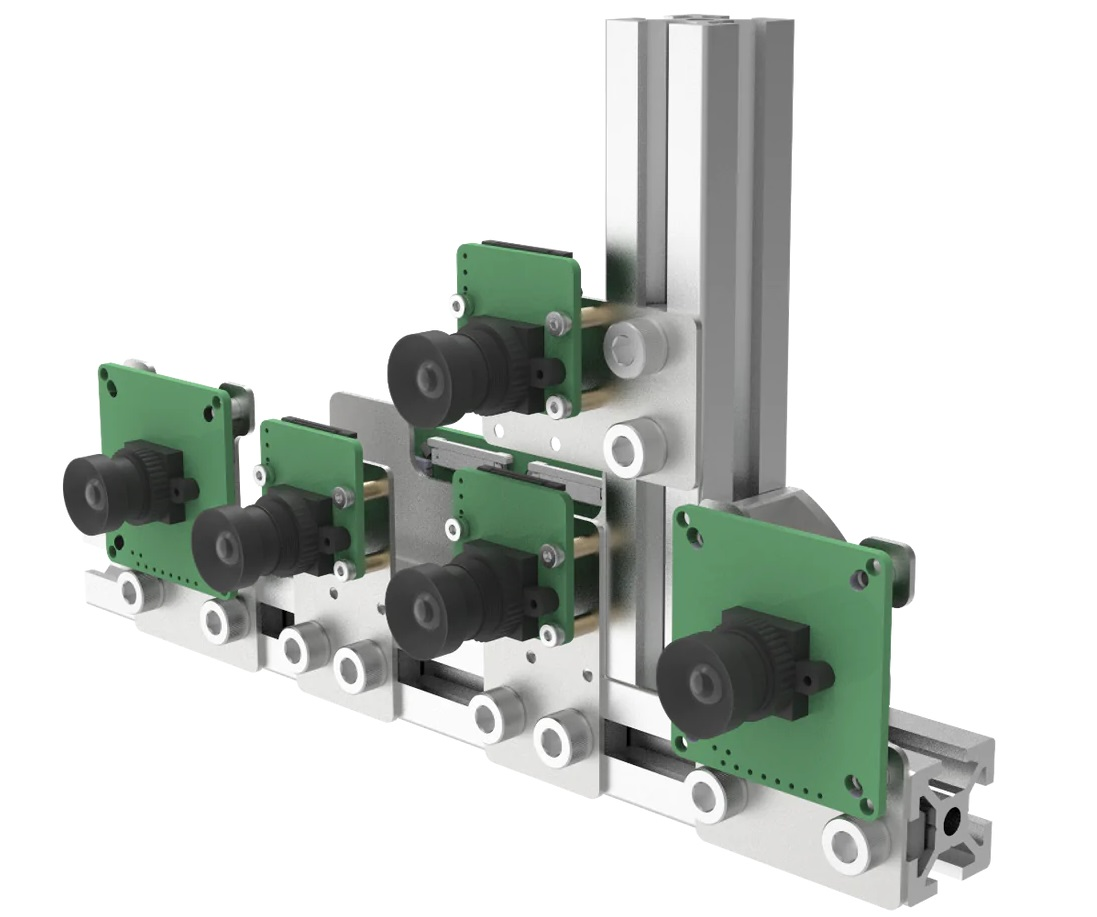
FFC相机安装
OAK-FFC 配件是安装 OAK FFC 相机模块的支架,它允许您轻松自定义水平和垂直立体声基线。你可以从我们的商店购买。有关用法,请参阅此处的说明。
M12 卡口镜头
上述一些 FFC 相机模块具有 M12 卡口,因此您可以使用各种不同的镜头(用于自定义 FoV),例如:
-
10 个不同 M12 镜头的套件(用于测试目的)
-
M25156H14 (HFoV: 141°)
-
M40180H10 (HFoV: 100°)
-
M2506ZH04 (HFoV: 33°)
-
其他
M12 可选 FOV
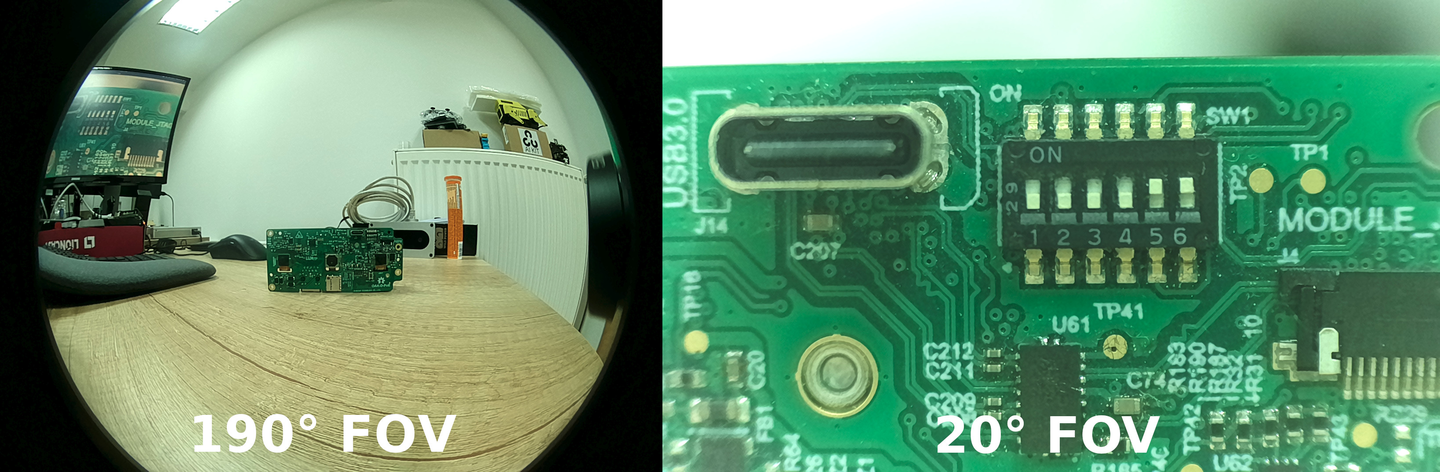
使用 2 个 OAK-FFC-IMX477-M12 和两个不同的 M12 镜头进行测试:20° FOV 和 190° FOV。
OAK-FFC-IMX477-M12 FOV 和广角 FOV M12 镜头的并排比较:
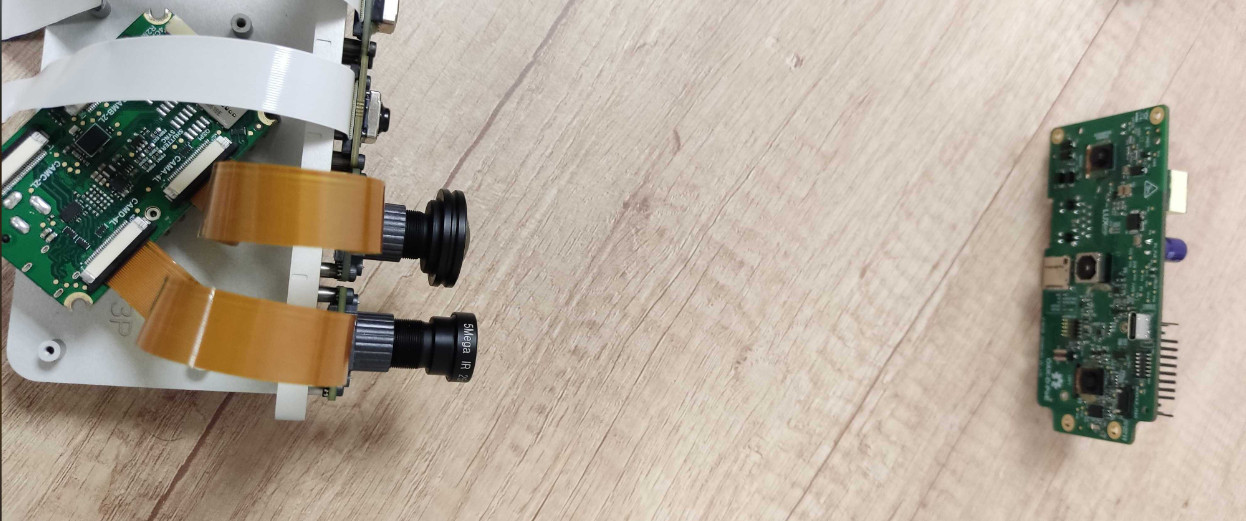
从鸟瞰图进行测试设置:
使用 OAK FFC 进行开发
1. 安装要求
根据你使用的 FFC 设备,您可以查看入门指南,了解以下任一信息:
安装dependencies和 depthai 库后,您可以开始使用 OAK FFC 设备进行开发。
2. 测试配置
将镜头连接到主控板后,你可以使用utilities/cam_test.py脚本快速测试镜头是否按预期工作。默认情况下,它将尝试在 2 通道 MIPI 端口 B(左)和 C(右)上运行 2 个单色摄像头,在端口 A (RGB) 和 D(4 通道 MIPI 端口)上运行 2 个彩色摄像头。
如果连接了不同的摄像机,则可以指定要与参数一起使用的--cameras摄像机类型:
Command Line 命令行
cam_test.py [-h] [--cameras <BoardSocket>,<CameraType>]例如,如果您有 3 个单色摄像头连接到端口 A、B 和 C,则可以运行以下命令:
Command Line 命令行
python3 cam_test.py --cameras rgb,m right,m left,m3. 在代码中运行
要将此类配置添加到脚本中,可以使用以下代码
python
cam_a = pipeline.create(dai.node.MonoCamera)
cam_a.setBoardSocket(dai.CameraBoardSocket.CAM_A) # Same as CameraBoardSocket.RGB
cam_a.setResolution(dai.MonoCameraProperties.SensorResolution.THE_400_P)
cam_b = pipeline.create(dai.node.MonoCamera)
cam_b.setBoardSocket(dai.CameraBoardSocket.CAM_B) # Same as CameraBoardSocket.LEFT
cam_c = pipeline.create(dai.node.MonoCamera)
cam_c.setBoardSocket(dai.CameraBoardSocket.CAM_C) # Same as CameraBoardSocket.RIGHT
cam_d = pipeline.create(dai.node.MonoCamera)
cam_d.setBoardSocket(dai.CameraBoardSocket.CAM_D)
cpp
auto cam_a = pipeline.create<dai::node::MonoCamera>();
cam_a->setBoardSocket(dai::CameraBoardSocket::CAM_A); // Same as CameraBoardSocket::RGB
cam_a->setResolution(dai::MonoCameraProperties::SensorResolution::THE_400_P);
auto cam_b = pipeline.create<dai::node::MonoCamera>();
cam_b->setBoardSocket(dai::CameraBoardSocket::CAM_B); // Same as CameraBoardSocket::LEFT
auto cam_c = pipeline.create<dai::node::MonoCamera>();
cam_c->setBoardSocket(dai::CameraBoardSocket::CAM_C); // Same as CameraBoardSocket::RIGHT
auto cam_d = pipeline.create<dai::node::MonoCamera>();
cam_d->setBoardSocket(dai::CameraBoardSocket::CAM_D);扩展功能
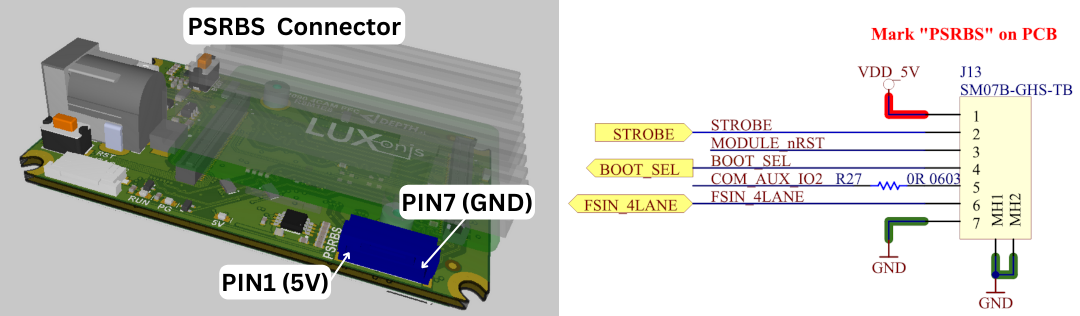
1. PSRBS 连接器
OAK-FFC-4P 具有 PSRBS 连接器,允许用户轻松地将 OAK 相机连接到外部逻辑。您可以使用 PSRBS cable连接到此连接器
| pin | 名称 | 介绍 |
|---|---|---|
| 1 | VDD_5V | 5V电源输入/输出 |
| 2 | STROBE | 频闪信号输出,可驱动外部照明(投影仪、照明灯等) |
| 3 | MODULE_nRST | 允许从外部源重置 OAK-FFC(GND 将重置 RVC2,与 RST 按钮相同) |
| 4 | BOOT_SEL | 允许选择是否启动到引导加载程序(1.8V将跳过引导加载程序,与BOOT按钮相同) |
| 5 | COM_AUX_IO2 | 2-land MIPI FSYNC 信号输入/输出 |
| 6 | FSIN_4LANE | 4-land MIPI FSYNC 信号输入/输出 |
| 7 | GND | GND 电源输入/输出 |
2. 连接 IR 模块
如果你有 OAK-FFC-4P R5 或更高版本,并且希望使用 OAK-FFC-IR 模块,必须首先确定配置哪个镜头将 STROBE 信号驱动连接 IR 模块的连接器。连接器位于交换机的左侧(J12,见下图)

如果你在CAM_B和CAM_C上拥有一对立体声摄像头,并且希望将点投影仪与立体声摄像头同步,则应将开关 2 或 3 向上移动 。请记住,一次只能启动一个开关。
3. UART
某些 OAK FFC 设备上具有 UART端口,因此您可以使用它与其他设备进行通信。例如,您可以将 GPS 模块连接到 UART 端口,并在应用程序中获取 GPS 数据。
要在应用程序中使用 UART,请查看
UART示例
4. UART 引脚排列
引脚排列取决于您使用的电路板。以下是 OAK-FFC 器件的 UART 引脚排列:
| OAK-FFC设备 | TX | RX |
|---|---|---|
| OAK-FFC-4P | 15 | 16 |
| OAK-FFC-4P POE OAK-FFC-4P POE电设备 | / | / |
| OAK-FFC-1P POE OAK-FFC-1P POE电设备 | 45 | 46 |
| OAK-FFC-3P | / | / |
- SD 卡支持
SD 卡功能仅供社区支持,仍应在单独的 depthai 分支上运行,但不会经常更新。
您可以使用 SD 卡来存储来自正在运行的设备的数据(日志/图像/配置) - 请参阅示例。