本科阶段最后一次竞赛Vlog------2024年智能车大赛智慧医疗组准备全过程------3bin模型转化环境的准备
今天给大家带来的是在上一期基础上最重要的一步,这个地方是我开始踩坑的开始。
当时一开始看教程,不知道怎么看到了高级进阶版。当时也是弄了好久,今天给大家分享一下
1.坑来自哪里?
我在初始准备转模型看工具链的时候,当时也很奇怪直接看到了9.3的环境安装,唉唉哎当时也是离谱,不知道怎么看到那里 了
一开始刚开始学习的时候,对于地平线这个板子没有架构概括,弄了好久都不知道自己这步在干啥
最后发现入门指南 9.2 入门指南 | RDK X3用户手册 (horizon.cc)是最有用的,我甚至感觉比使用docker都快哈哈

2.虚拟机配置
当然首先要有个环境载体,入门指南说了需要Ubuntu 20.04,接下来带大家如何配置虚拟机
我下面给大家推荐一个链接,我当时就是按照这个进行配置的VMware 下载安装Ubuntu20.04详细图文教程_vmware17安装ubuntu 20.04-CSDN博客
因为我的虚拟机好多东西,就不重新从0开始配置了,当然如果大家哪些地方复现有问题,可以评论区回复,这里我偷个懒
3.ROS2安装配置
3.1设置语言环境
bash
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-83.2添加ROS2的源
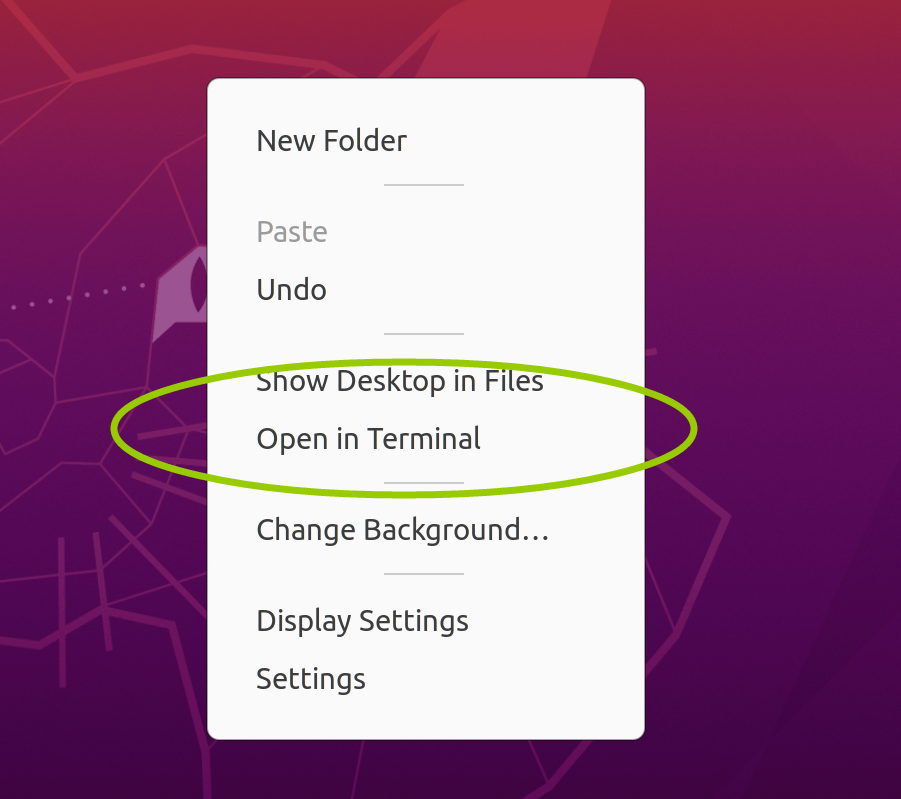
大家回到桌面右键一个终端 new terminal 在里面依次输入下面内容
bash
sudo apt update
sudo apt install curl gnupg2 lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null3.3curl403
这个时候我又遇到了一个问题,curl时候出现了443,接下来告诉大家如何进行下一步
手动下载
bash
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg要实现上述命令的效果,需要将下载的 ros.key 文件手动移动到 /usr/share/keyrings/ 目录,并重命名为 ros-archive-keyring.gpg。按照以下步骤操作:
-
打开终端。
-
移动和重命名文件 。假设
ros.key文件当前位下载文件夹中,可以使用以下命令将其移动到正确的位置并重命名:bashsudo mv ~/Downloads/ros.key /usr/share/keyrings/ros-archive-keyring.gpg请根据实际的文件位置修改这条命令中的路径。
-
验证操作 。检查
/usr/share/keyrings/目录下是否存在ros-archive-keyring.gpg文件。bashCopy code ls -l /usr/share/keyrings/ros-archive-keyring.gpg如果文件存在,表示操作成功。
-
更新APT软件源。运行以下命令sudo apt update更新软件源:
到此为止这一个403问题就解决了
3.4正式安装
bash
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop3.5设置环境变量
bash
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc 3.6测试
新建一个终端输入
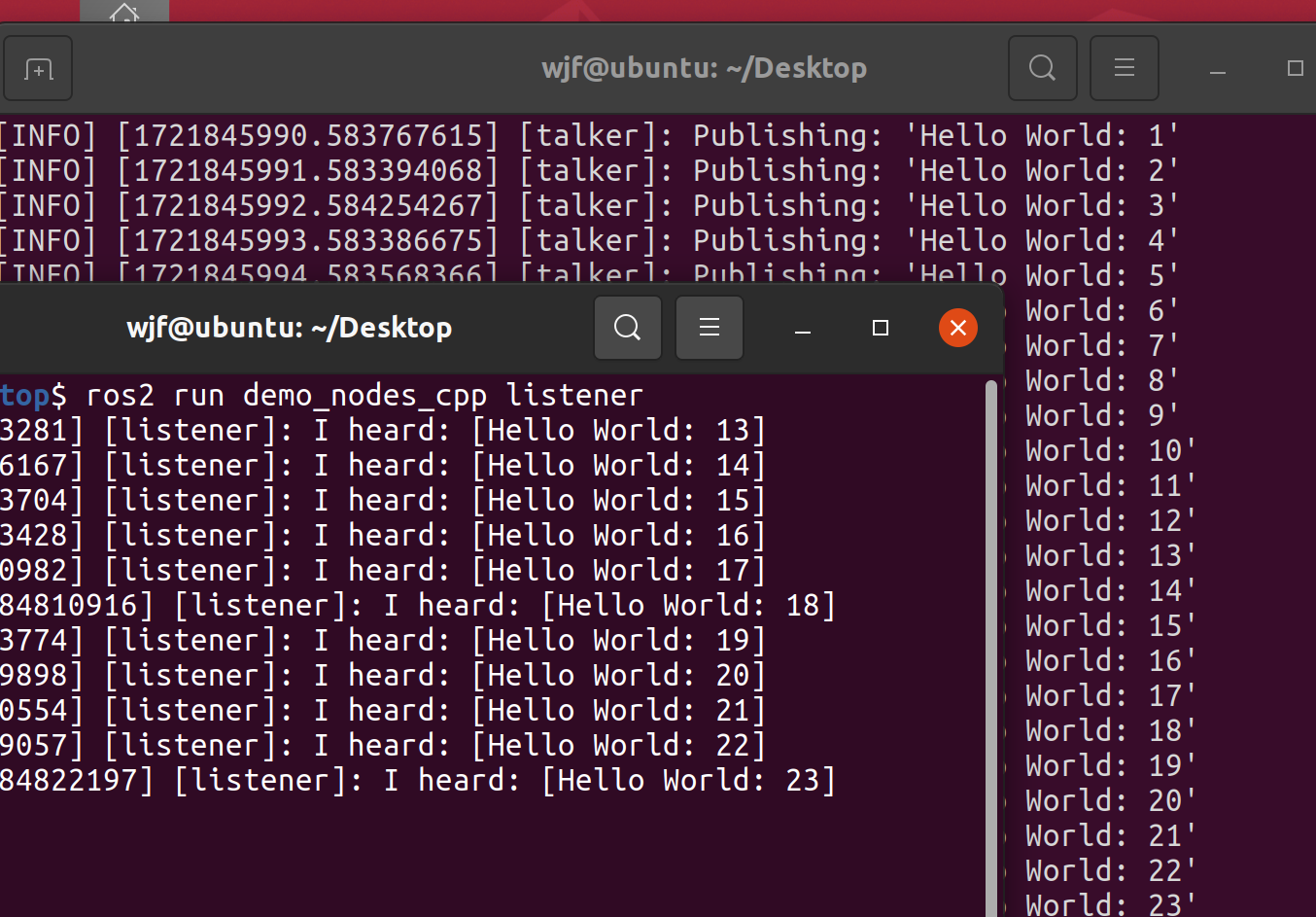
ros2 run demo_nodes_cpp talker再新建一个终端输入
ros2 run demo_nodes_py listener此时就发现hello world正常运行了
4.Anaconda环境配置
我记得上一篇我说有关Anaconda的配置就不教大家了,因为教程确实多,这里Anaconda的linux版本可能大家找不到非常合适的
其实linux版本的anaconda基本上全是命令,还是很简单的
这里给大家详细讲一下,如果Windows版本的大家有问题也可以评论区提问我最后做一个补充
4.1获取并安卓
bash
wget https://mirrors.tuna.tsinghua.edu.cn/anaconda/archive/Anaconda3-5.2.0-Linux-x86_64.sh
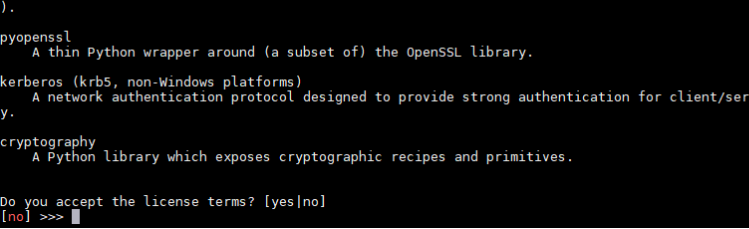
sh Anaconda3-5.2.0-Linux-x86_64.sh 这个时候会弹出一些东西,这里是协议内容,一直空格到底部,然后输入yes ---> 回车
最后所有步骤完成,一路按下enter和yes最后安装路径使用默认路径
4.2配置环境变量
bash
export PATH="$HOME/anaconda3/bin:$PATH"
source ~/.bashrc4.3验证使用
bash
conda --version4.4新建环境
这个时候按照手册上面的就可以新建一个环境了,注意注意要求是py3.8
conda create -n 环境名字 python=3.8
接下里一路按下yes
#激活环境
conda activate 环境名字
#(horizon_bpu是我得环境名字)
5.转化工具链
5.1获取模型转换资料包
在刚才4.4的最后一步激活环境后输入下面命令
bash
wget -c ftp://xj3ftp@vrftp.horizon.ai/ai_toolchain/ai_toolchain.tar.gz --ftp-password=xj3ftp@123$%
wget -c ftp://xj3ftp@vrftp.horizon.ai/model_convert_sample/yolov5s_v2.0.tar.gz --ftp-password=xj3ftp@123$%5.2 安装相关库
bash
tar -xvf yolov5s_v2.0.tar.gz
tar -xvf ai_toolchain.tar.gz
pip install ai_toolchain/h* -i https://mirrors.aliyun.com/pypi/simple
pip install pycocotools -i https://mirrors.aliyun.com/pypi/simple5.3测试
输入下面
bash
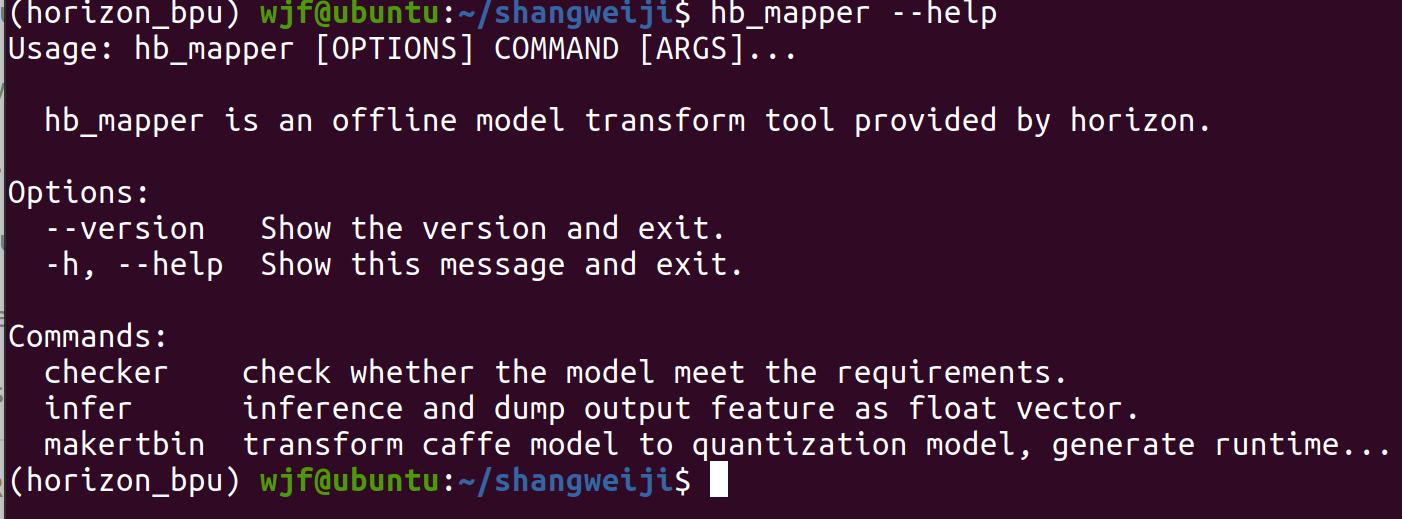
hb_mapper --help看到下面内容就成功啦
6总结与下期预告
到目前为止,你已经拥有了20.04并且有了Anaconda和ROS2
下一期我将给大家带来正式与bin模型转化的工具链相关的内容
5.3测试
输入下面
bash
hb_mapper --help看到下面内容就成功啦
外链图片转存中...(img-UAMvAj7o-1722696668163)
6总结与下期预告
到目前为止,你已经拥有了20.04并且有了Anaconda和ROS2
下一期我将给大家带来正式与bin模型转化的工具链相关的内容