安能以血补天哉
- [0. 前言](#0. 前言)
- [1. 实践](#1. 实践)
-
- [1.1 用户手册](#1.1 用户手册)
- [1.2 开发文档](#1.2 开发文档)
- [1.3 网络RTK的注入](#1.3 网络RTK的注入)
- [20240801 与周工的交流](#20240801 与周工的交流)
0. 前言

Rpanion Server 是一个运行在无人机板载计算机上的开软软件方案,是ardupilot生态中的一个开源方案。
它的功能包括:
- 通过UART 或 USB 连接飞控;
- 通过USB连接摄像机,如webcam;
- 网络RTK注入;
- 视频流转发?
- mavlink数据包的UDP/TCP转发;
- 网络配置、vpn配置;
- 日志上传云端;
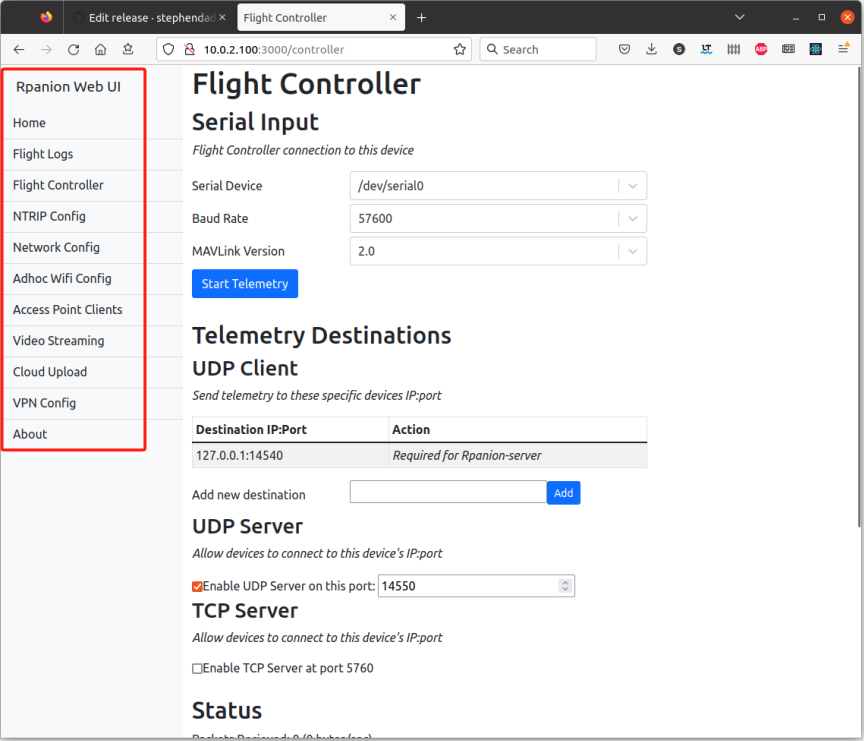
- Rpanion-server 运行后会自动创建一个wifi热点,SSID:rpanion ,password:rpanion123。连接这个热点后可以访问
http://10.0.2.100:3000这个页面对Rpanion-server进行功能配置,如下图:
1. 实践
1.1 用户手册
https://www.docs.rpanion.com/software/rpanion-server#web_interface
1.2 开发文档
https://github.com/stephendade/Rpanion-server/blob/master/README.md
1.3 网络RTK的注入
Rpanion-server/server/ntrip.test.js
20240801 与周工的交流
- 1.关于无人机4g数传方案的实现
方案1 :clover.coex.tech/en/zerotier_vpn.html 看文档
机载计算机运行一个zerotier客户端,另一台联网的PC运行一个zerotier客户端,那么机载计算机和PC就会处在一个"虚拟"的局域网中(机载计算机和PC都会出现一个虚拟的网卡,类似于向日葵远程,本质是一种vpn技术),这样就可以在机载计算机端建立一个固定IP的mavlink数据UDP/TCP转发(这个固定IP就是PC虚拟网卡的ip,转发软件可以使用Rpanion-server 或mavproxy),这样连接以太网的PC端地面站就可以通过UDP/TCP连接接收到飞控的mavlink数据了。
方案2 :https://github.com/fatedier/frp 看 README.md
反向代理,局域网运行一个服务器,公网运行一个服务。 - 2.关于RTSP推流
使用 ZLMediaKit - 3.关于使用MQTT与云平台调度系统的通讯
搭建MQTT服务器,开源方案多,如...
Linux MQTT客户端程序(访问MQTT服务器的程序)的一个例子:https://github.com/eclipse/paho.mqtt.cpp
业务逻辑:
1)机载计算机通过4g/5g sim网卡(或4g/5g 模块)连接以太网,使得机载计算机可以访问到MQTT服务器;
2)MQTT客户端1运行在机载计算机上;MQTT客户端1通过mavsdk得到飞控数据,打包成json格式,json数据以主题订阅和发布的形式被发布到MQTT服务器;
MQTT客户端2运行在云平台调度系统上,MQTT客户端2通过订阅相关的主题,接收到消息后进行数据解析,得到飞控数据。
3)MQTT客户端2与飞机的控制链路则同理,MQTT客户端2的控制指令通过MQTT服务器传递给MQTT客户端1,MQTT客户端1再通过mavsdk控制飞机!