文章目录
[7.1 所需硬件](#7.1 所需硬件)
[7.2 Nokov 系统设置](#7.2 Nokov 系统设置)
[7.3 配置旋翼机](#7.3 配置旋翼机)
[7.4 启动 Nokov 模块](#7.4 启动 Nokov 模块)
[7.5 MAVProxy 准备](#7.5 MAVProxy 准备)
[7.6 测试飞行](#7.6 测试飞行)
[7.7 参数说明](#7.7 参数说明)
前言
本文将介绍如何通过 Nokov 运动捕捉系统向旋翼机传输姿势信息。联系方式:NOKOV | Optical Motion Capture System。
7.1 所需硬件
从 GCS 计算机到直升机,以及从 GCS 到 Nokov 运动捕捉系统,你都需要一个低延迟的网络链接。
7.2 Nokov 系统设置
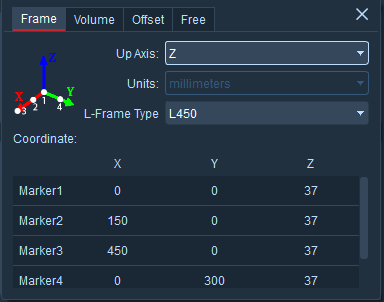
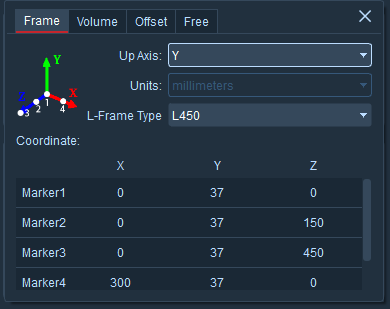
- Nokov 包括两个坐标校准系统,即 Z 轴向上和 Y 轴向上;
- 当 Z 轴向上时,前进方向与 Y 轴对齐;
- 当 Y 轴向上时,前进方向与 X 轴对齐;
- 在飞行器上放置标记:

- Z 轴向上的校准系统;
- Y 轴向上的校准系统;
7.3 配置旋翼机
- AHRS_EKF_TYPE=3;
- EK3_ENABLE=1;
- EK2_ENABLE=0;
- COMPASS_USE=0;
- COMPASS_USE2=0;
- COMPASS_USE3=0;
- VISO_TYPE=1;
- EK3_SRC1_POSXY=6;
- EK3_SRC1_POSZ=6;
- EK3_SRC1_YAW=6;
- EK3_SRC1_VELXY=0;
- EK3_SRC1_VELZ=0。
7.4 启动 Nokov 模块
- 使用 MAVProxy 开始连接旋翼机。在 MAVProxy 中加载 optitrack 模块:
- 模块加载 nokov;
- 将主机设置为动作捕捉系统:
- nokov 设置主机 HOST_IP_ADDRESS;
- 设置轴校准系统("z"或 "y"):
- nokov set axis "z";
- 设置跟踪器名称,以便从运动捕捉系统进行跟踪:
- nokov set tracker_name TRACK_NAME
7.5 MAVProxy 准备
从 Nokov 获取 nokvo-sdk 并将其放入"MAVProxy/modules/mavproxy_nokov",修改 setup.py 文件:zip_safe=True。
7.6 测试飞行
将地面站连接到旋翼机,然后确保启用 Nokov SDK 并有数据流,正确设置主机、轴和跟踪器名称。
7.7 参数说明
1. EK3_SRC1_POSXY:位置 水平源(主要)
注意:该参数适用于高级用户。
位置 水平源(主要)。
| Values |
|---|
- EK3_SRC1_POSZ:位置 垂直源
注意:该参数适用于高级用户。
位置 垂直源。
| Values |
|---|
3. EK3_SRC1_VELXY:速度水平源
注意:该参数适用于高级用户。
速度水平源。
| Values |
|---|
4. EK3_SRC1_VELZ:速度 垂直源
注意:该参数适用于高级用户。
速度 垂直源。
| Values |
|---|