文章目录
[3 ESC遥测记录和报告](#3 ESC遥测记录和报告)
[4 用作电池监测器](#4 用作电池监测器)
前言
如果ESC具有此功能,则允许监测和记录以前需要额外传感器(如电源模块和RPM传感器)的性能数据。每个ESC提供的详细数据允许实时决策和单个ESC或电机性能调整和故障分析。请注意,给定的ESC可能有也可能没有通过遥测传输的特定传感器类型的数据。通常,4/1 ESC提供电压和电流传感器,但不通过遥测传输数据,而是直接连接到自动驾驶仪。有关详细信息,请查看ESC数据表和连接信息。
3 ESC遥测记录和报告
自动驾驶仪一次从一个ESC请求状态信息,在它们之间循环。此信息记录在机载日志的ESCn消息中,可以在任何与ArduPilot兼容的日志查看器中查看( ArduPilot compatible log viewer)。
- RPM
- Voltage
- Current
- Temperature
- Total Current
RCOU消息也会写入板载日志,这些日志保存了发送给ESC的请求输出级别,以1000(表示停止)到2000(表示完全输出)的数字表示。
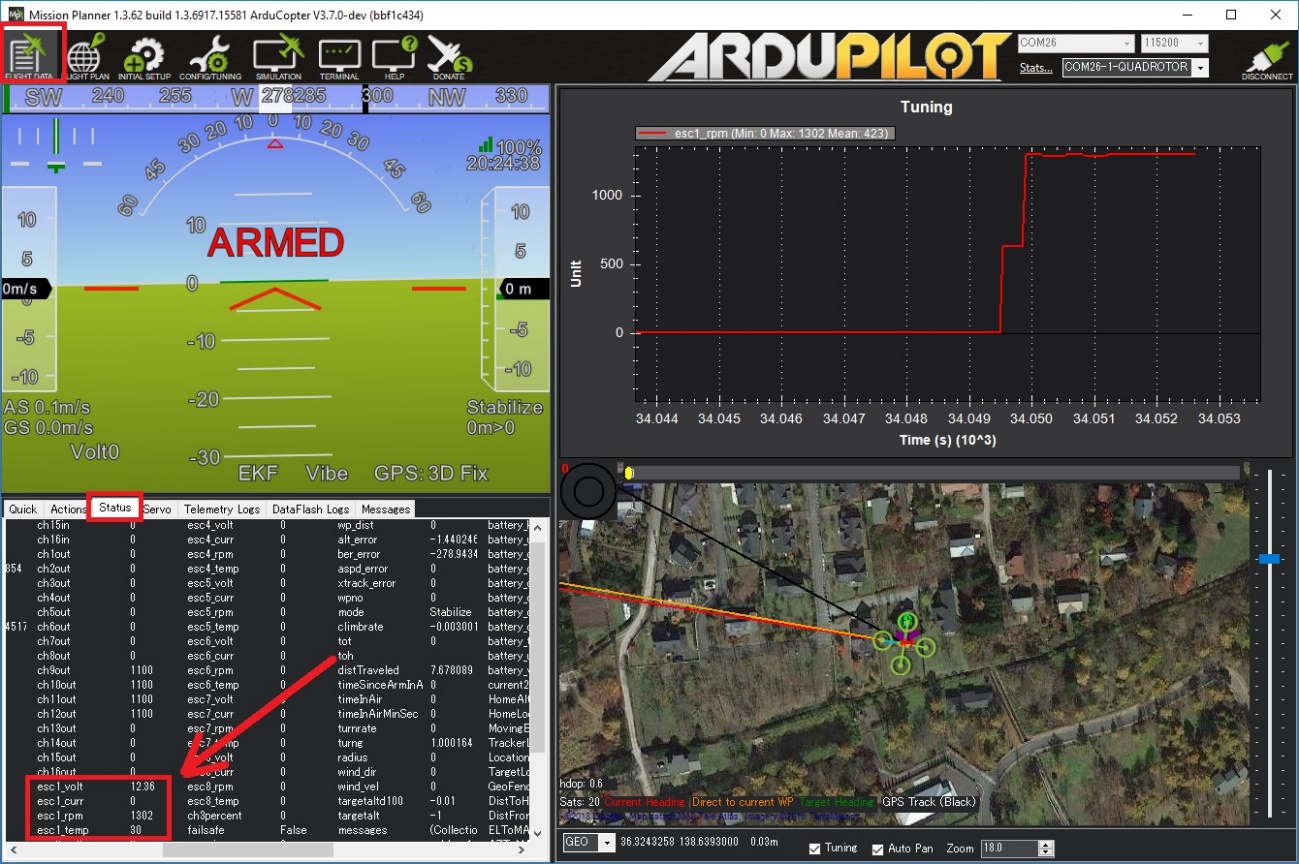
这些数据也可以使用地面站实时查看。如果使用任务计划器,请转到飞行数据屏幕的状态选项卡,查找esc1_rpm。
! Note
向地面军事系统发送BLHeli32遥测数据需要使用MAVLink2进行遥测连接。默认情况下,ArduPilot在USB端口上使用MAVLink2,但如果使用其他端口,可能需要将SERIALx_PROTOCOL参数设置为2(其中"x"是用于遥测连接的串行端口号)。
此外,如果你的自动驾驶仪有,一些遥测值可以显示在集成的机载OSD上(on-board OSD)。
较新固件版本(如BlHeli32自32.10版起,以及Bluejay自0.19版起)也通过双向DShot协议报告上述部分信息,采用名为扩展DShot遥测(Extended DShot Telemetry)的协议扩展。该协议的第二版EDTv2还规定了电调可报告的以下信息:
- 换向应力;
- 故障事件(如螺旋桨失速);
- 警告事件(如失步);
- 警报事件(如退磁事件)。
若通过双向DShot连接的ESC支持此扩展功能,相关信息将自动发送至飞行控制器,并以EDT2消息形式记录。此类信息通常采用尽力而为的方式传输,主要用于飞行后的数据分析。
4 用作电池监测器
通过将电池监测器实例设置为BLHeli32电调类型(例如BATT2_MONITOR = 9),所有连接至配置的自动驾驶仪串口且接有遥测线路的BLHeli32电调将被聚合为单一数据源。通常所有电调报告的电压和温度值将被取平均值,电流值将被累加,消耗电流将被累计。但用户可通过设置监控器(此处以BATT3监控器为例)的BATT3_ESC_MASK位来选择使用特定电调的数据,而非全部电调数据。默认情况下,系统将使用所有配置为报告电源遥测数据的电调。