Nachi 机器人有两种控制柜,分别为 FD 控制柜和 CFD 控制柜。
·对于 FD 控制器,执行以下操作。
1.旋转控制柜钥匙,使其对准标注位置①。
2.旋转示教器旋钮至下图所示位置。然后依次单击绿色按钮与白色按钮,机器人上电运行。
·对于 CFD 控制器,执行以下操作。
1.旋转示教器旋钮至下图所示位置。
2.点击右上角"示教、再生条件 "。
3.启动选择 设置为 内部 , 同步操作模式 设置为 无效 。

4.同时按下 动作可能 和 I 后,I键指示灯处于点亮状态。
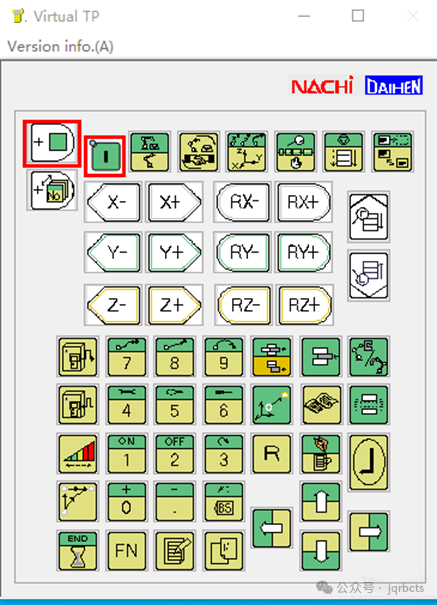
5.同时按下 动作可能 、 上档 和 前进检查 后,在程序窗口中,蓝条滚动,表明程序启动并运行。
|---|-------------------------------------|
| | 机器人主控程序烧录完成后,可启动 Mech-Center,连接机器人。 |