一、应用背景
在当今数字化和信息化时代,算法已经成为企业提高效率、优化决策的重要工具。随着大数据、人工智能技术的迅速发展,客户对算法的需求呈现出爆发式增长。这种需求不仅体现在数量上,更体现在质量上,尤其是对算法定制化的需求。下面阐述下我们客户定制算法的需求,具体如下:
二、项目概述
需要定制一项基于双光谱云台相机的入侵检测系统,该系统将被应用于机场周界巡检车辆,以实现全天候的周界安全监控,包括周界状态监测、入侵物体识别、特定行为分析及夜视能力强化。此确认书旨在确保项目双方对所有关键需求有共同的理解,并作为后续设计、开发与实施工作的基础。
三、系统目标与应用场景
目标:提升机场周界安全监控效能,及时发现并响应潜在威胁。
应用场景:机场周界内,通过搭载于巡检车的双光谱云台相机进行动态巡逻。
四、技术需求
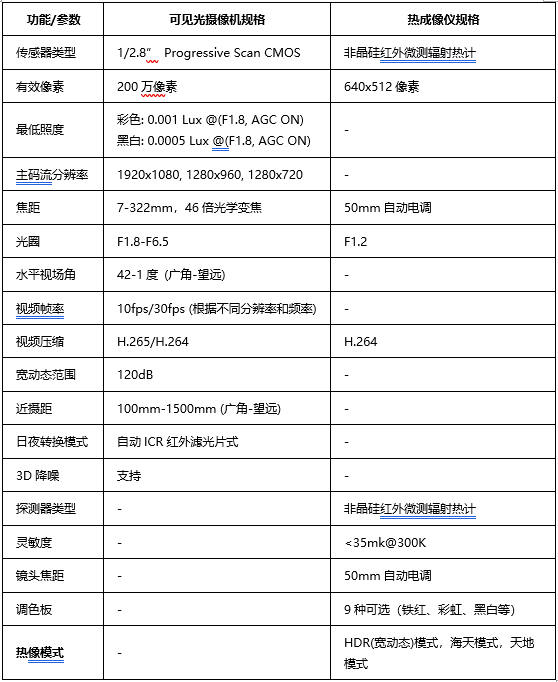
(一)双光谱相机配置(SM400GQ)
(二)检测与识别
目标识别:异常车辆、人员、动物(至少包括牛或羊)、特定行为(如靠近、翻越、逗留)。
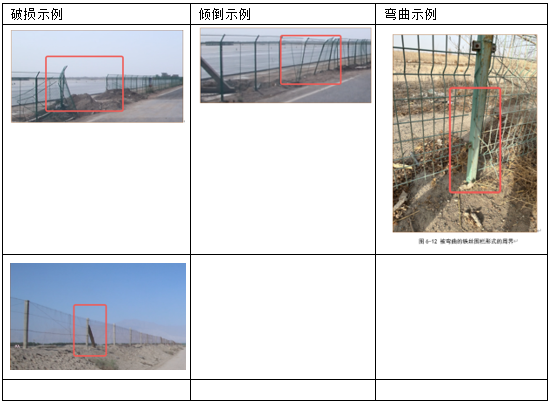
周界识别:至少3种周界类型(水泥栅栏、砖石围墙、铁丝网),并区分破损情况(正常、破损、倾倒、弯曲)。
距离与精度:正常天气下,400米内,100米范围内体积≥0.8立方米的目标识别准确率,车辆≥95%,人员≥90%。
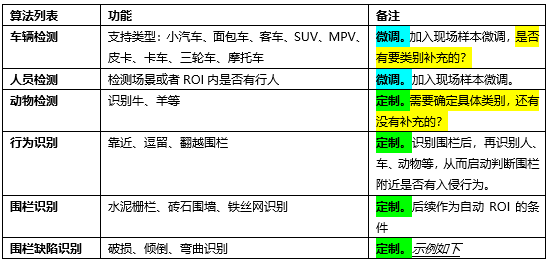
微调:就是已有算法和相关场景的数据,需要加入一些现场样本(每次至少需1000张),重新训练,就是不停根据现场的误报和漏报进行标注训练的迭代过程。每次微调周期为一周。
定制:明确需求后,提供初步样本,再收集一些样本,标注训练形成初始算法,需要的数据量相比微调要大一些,周期要长一些,费用要高一些。
未定事项:双光谱相机的结果是单独通道进行识别外部融合还是算法内部检测融合?如果是算法内部检测融合,可能会涉及到两个通道图像的标定和融合。
缺陷类型示例如下(请补充更多)
五、算法与系统集成
硬件平台:自动驾驶域控制器,算力150Tops,操作系统Ubuntu。
算法接口:提供C/C++接口。
训练样本:初期提供各分类约20张图片,后期快速迭代更新。
本需求确认书旨在确保项目双方对所有关键要素达成共识,为项目的顺利开展奠定坚实基础。双方应认真审阅并及时反馈任何修改意见,以保障后续工作进程的高效推进。