62.不同路径
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 "Start" )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 "Finish" )。
问总共有多少条不同的路径?
示例 1:
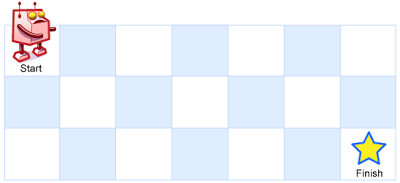
输入:m = 3, n = 7
输出:28示例 2:
输入:m = 3, n = 2
输出:3
解释:
从左上角开始,总共有 3 条路径可以到达右下角。
1. 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右
3. 向下 -> 向右 -> 向下示例 3:
输入:m = 7, n = 3
输出:28示例 4:
输入:m = 3, n = 3
输出:6思路
想用递归来解决当前格子的路径数量,递归计算前面相邻的格子路径数量相加,发现超时。题解中有给出二叉树的思想解题,深搜同样超时。
题解给出了解题时忽略的关键的点,即i==0 ||j==0这种状态是返回1.那么解题只需考虑遍历并按照
递推公式相加即可。
总结来说递推公式一开始想出来了,但是初始化出现了问题。因此dp问题还是得仔细思考五步走的问题。
代码
java
public int uniquePaths(int m, int n) {
int[][] dp=new int[m][n];
for (int i=0;i<m;i++){
dp[i][0]=1;
}
for (int j=0;j<n;j++){
dp[0][j]=1;
}
for (int i=1;i<m;i++){
for (int j=1;j<n;j++){
dp[i][j]=dp[i-1][j]+dp[i][j-1];
}
}
return dp[m-1][n-1];
}