本文内容,全部选自联盟自动化考研联盟企业店( 店)的:初试《现代控制特性班题库》(麒麟篇), 分为讲义和习题两个部分,本文为习题部分的甄选内容,一本书帮你学透现控。
目录
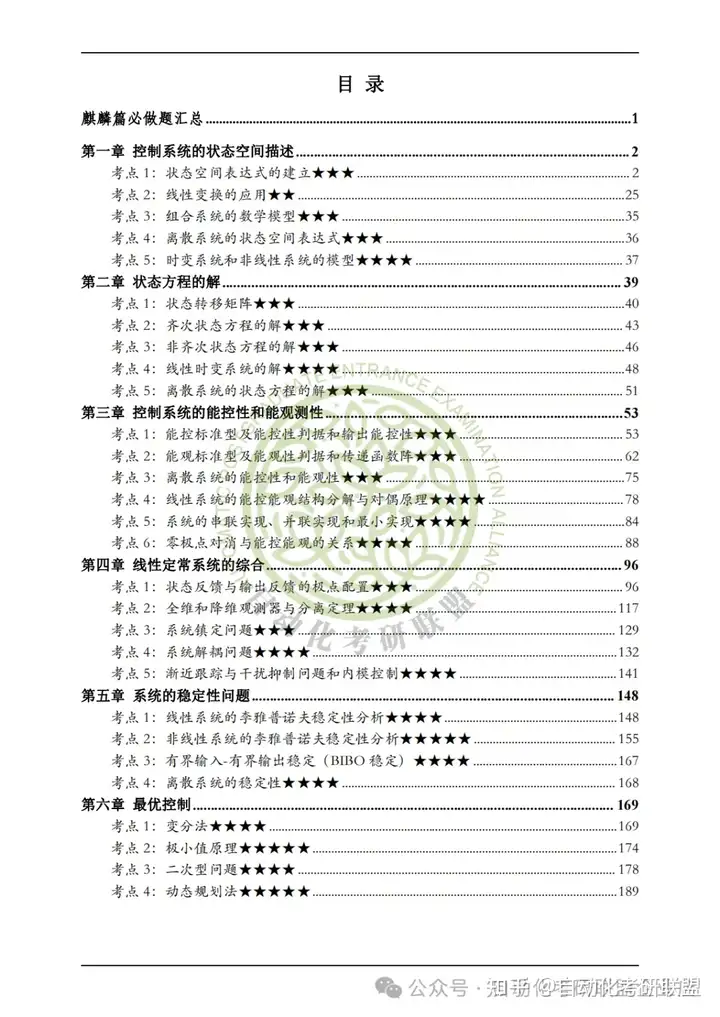
[第1章 控制系统的状态空间描述](#第1章 控制系统的状态空间描述)
[第2章 状态方程的解](#第2章 状态方程的解)
[第3章 控制系统的能控性和能观性](#第3章 控制系统的能控性和能观性)
[第4章 线性定常系统的综合](#第4章 线性定常系统的综合)
[第5章 系统的稳定性问题](#第5章 系统的稳定性问题)
[第6章 最优控制](#第6章 最优控制)
Part1:资料封面&目录

习题部分目录
Part2:习题部分各章节具体内容
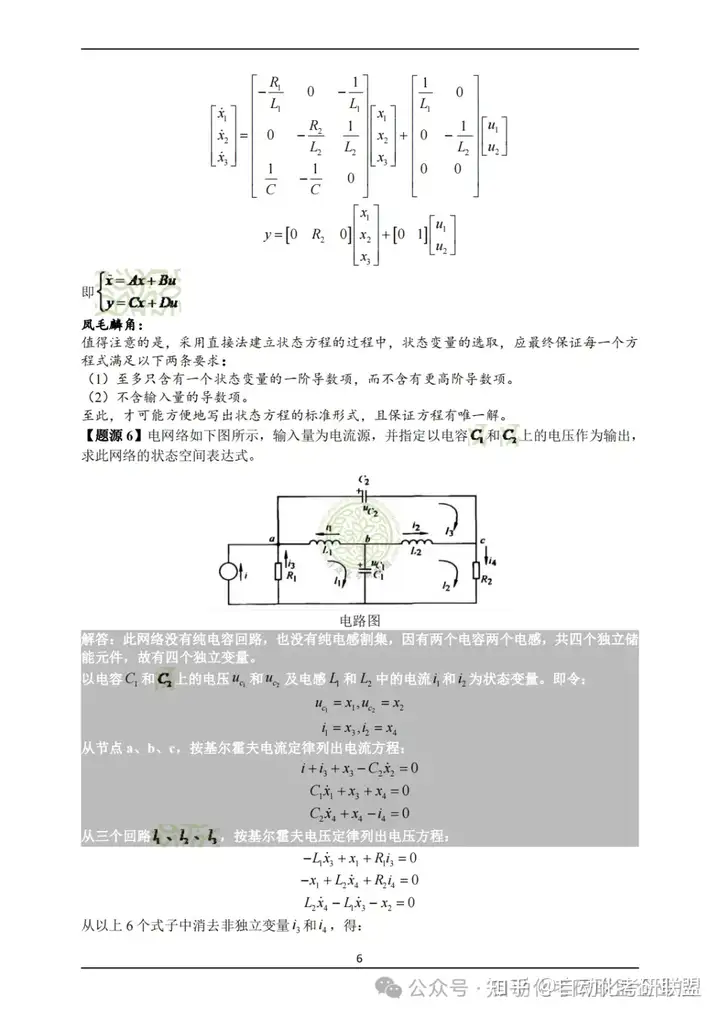
第1章 控制系统的状态空间描述

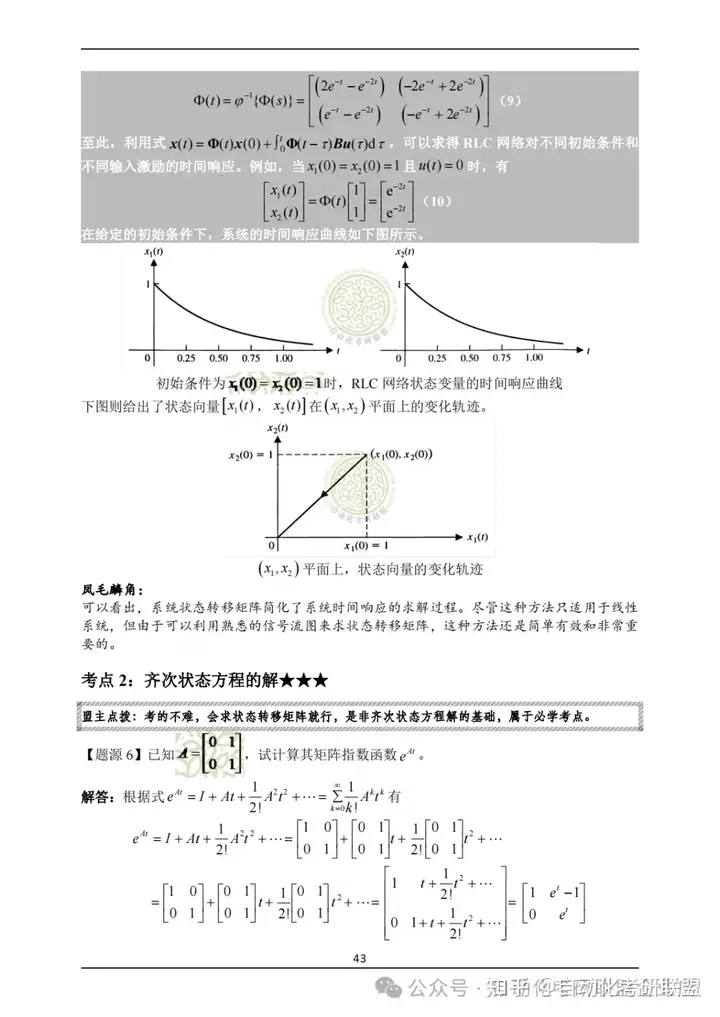
第2章 状态方程的解

第3章 控制系统的能控性和能观性

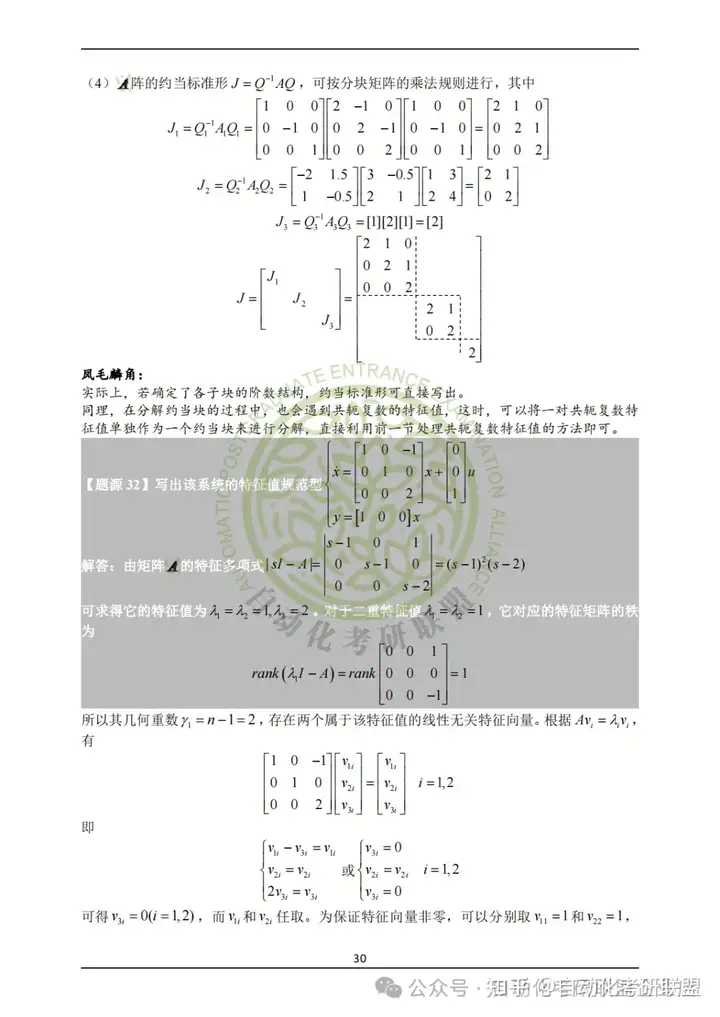
第4章 线性定常系统的综合

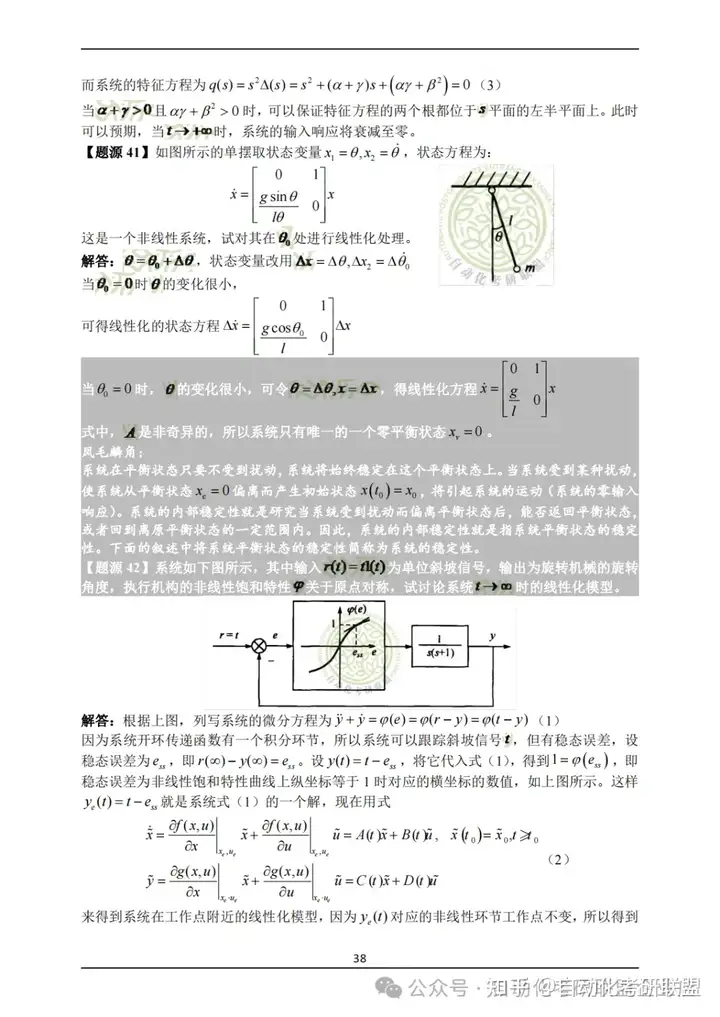
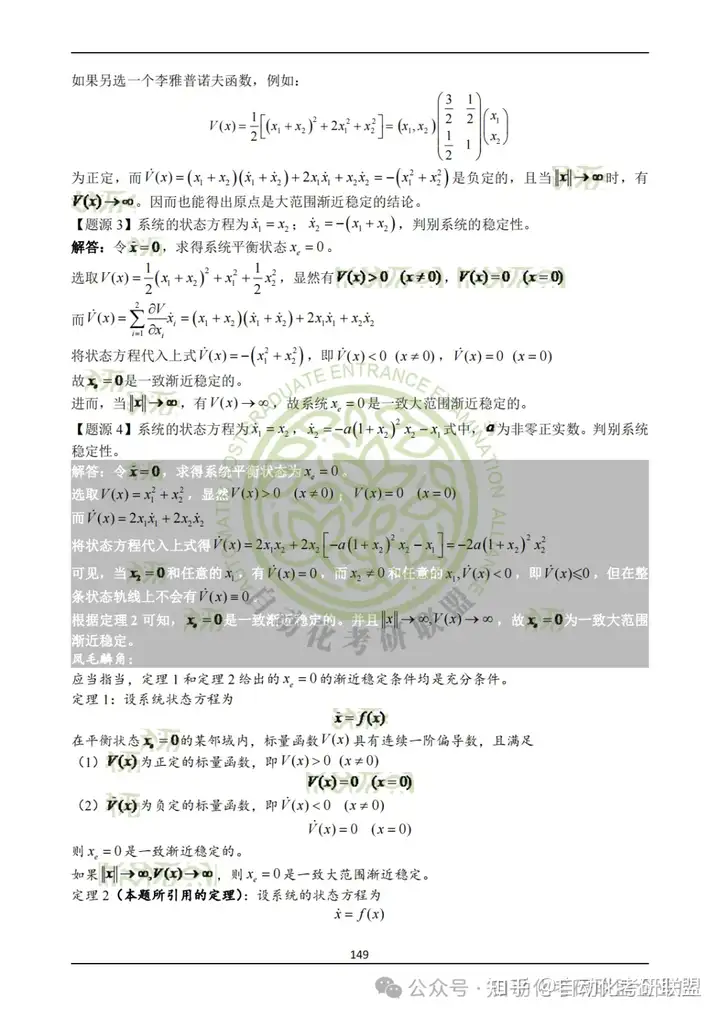
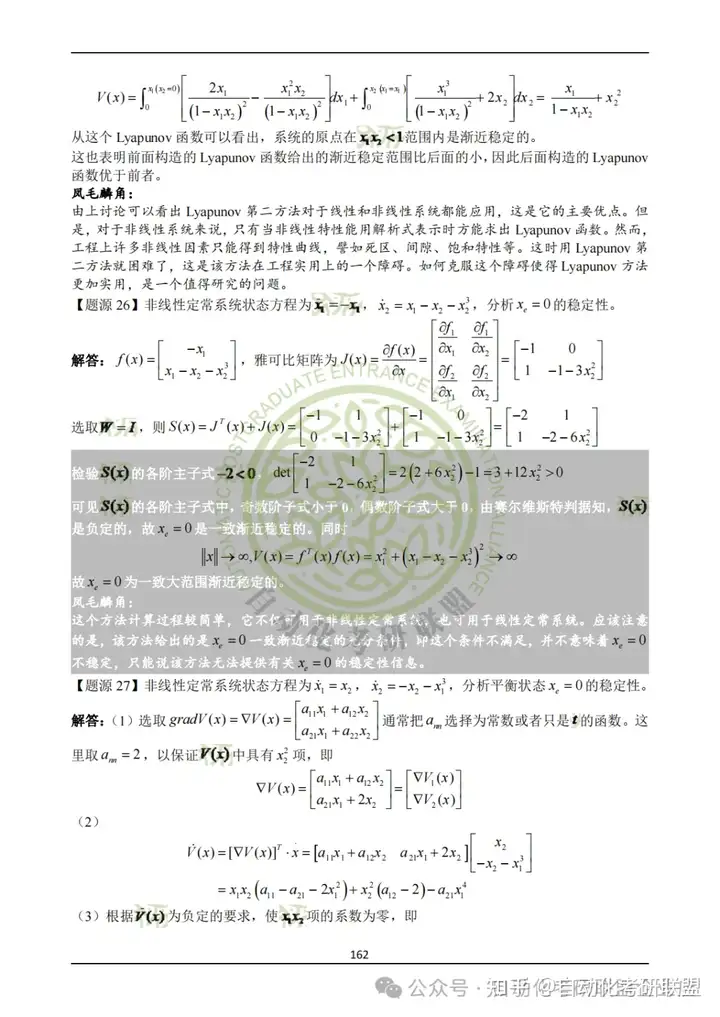
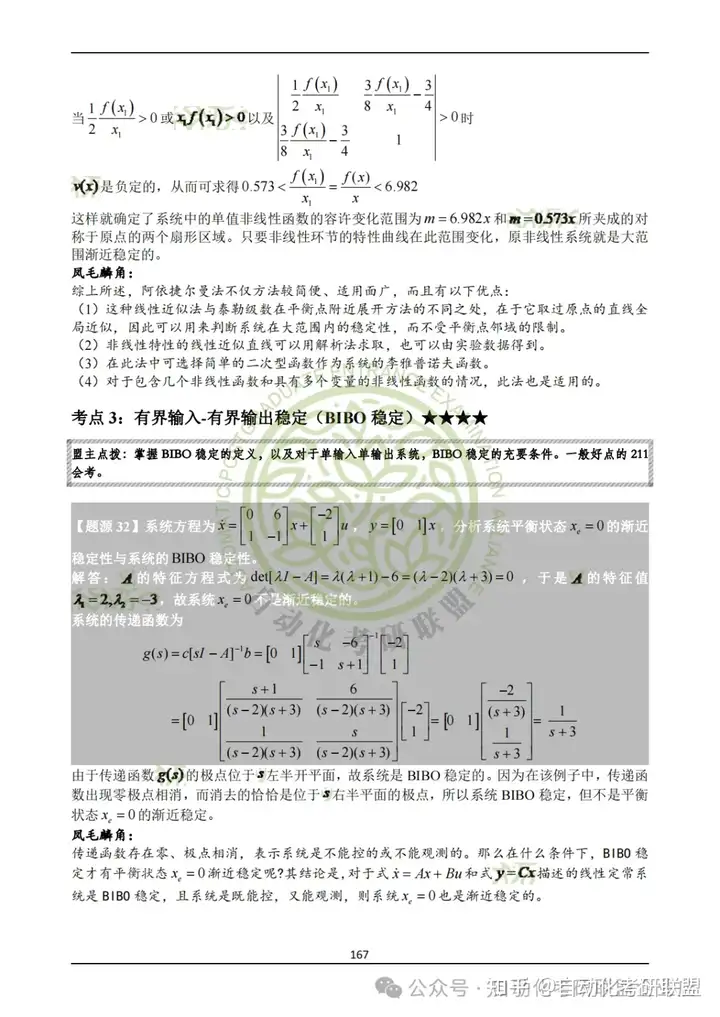
第5章 系统的稳定性问题
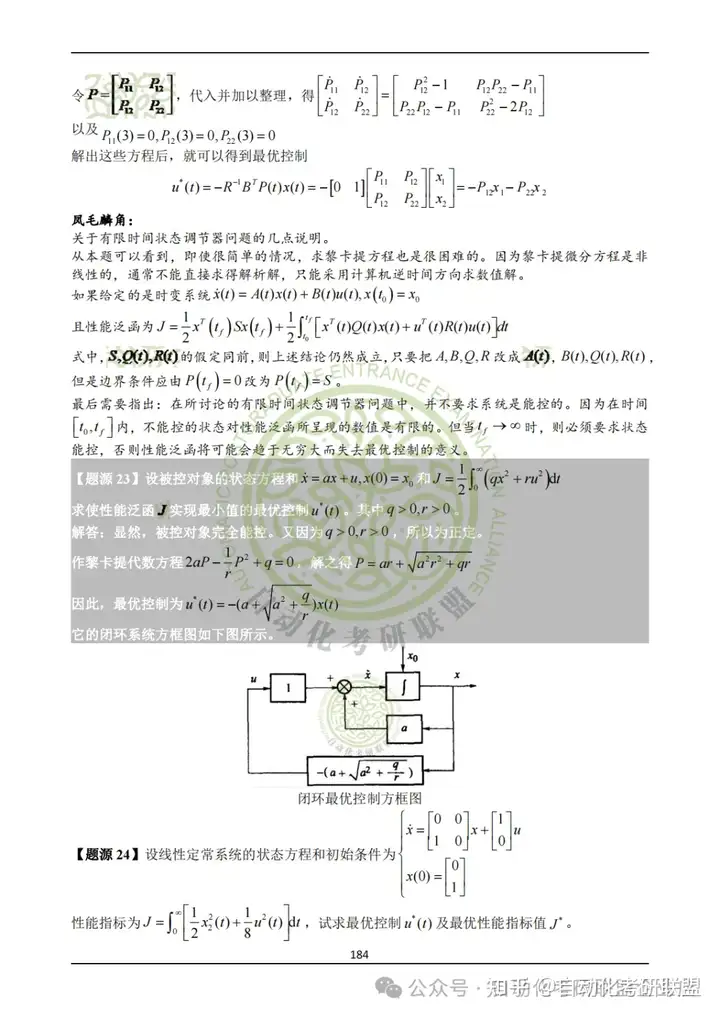
第6章 最优控制