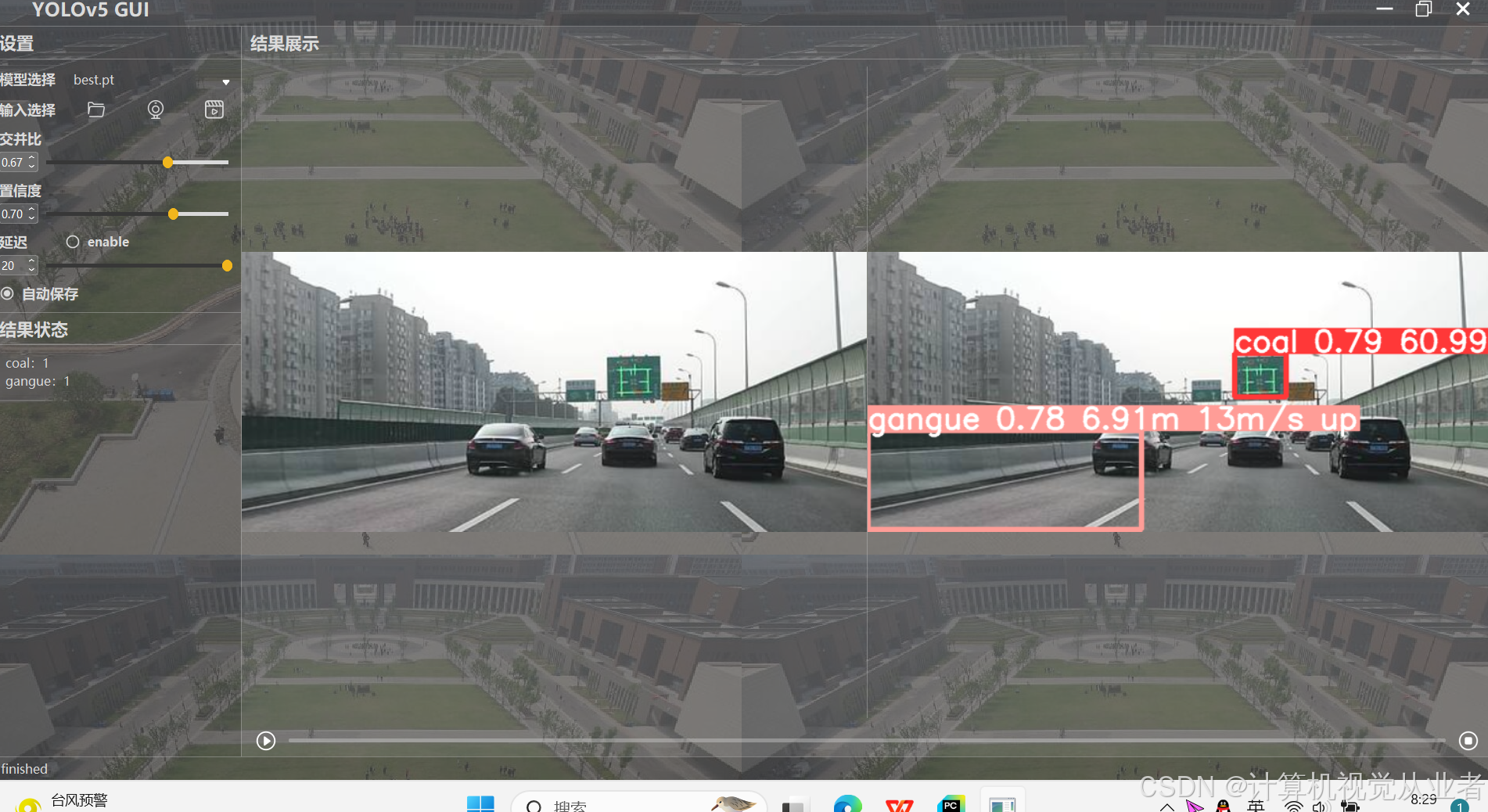
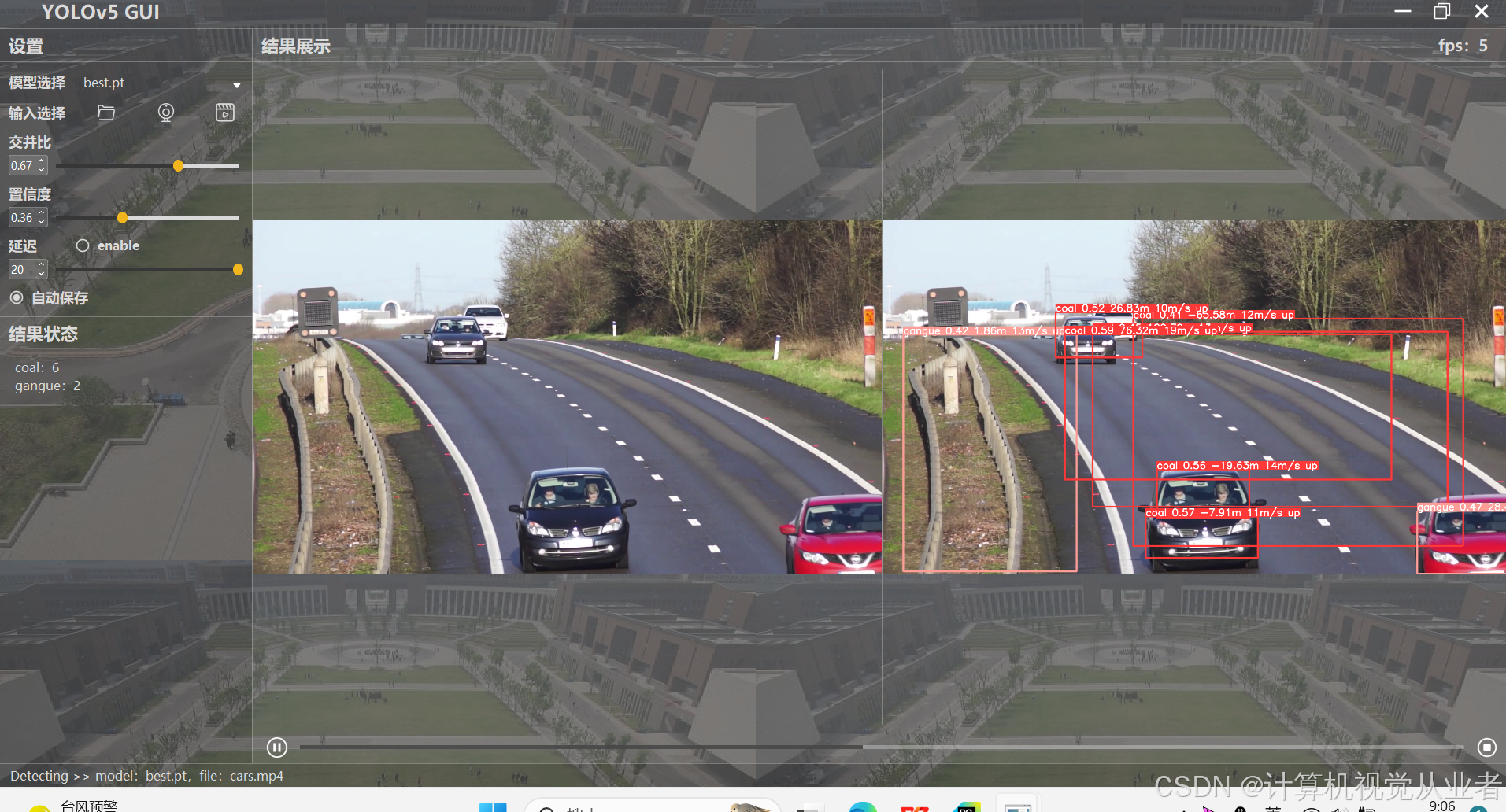
可实现对图片,视频,摄像头的检测
项目概述
本项目旨在实现一个集成了YOLOv5目标检测算法、图形用户界面(GUI)以及单目测距功能的系统。该系统能够对图片、视频或实时摄像头输入进行目标检测,并估算目标的距离。通过结合YOLOv5的强大检测能力和单目测距技术,系统能够在多种应用场景中提供高效、准确的目标检测和测距功能。
技术栈
- YOLOv5:用于目标检测的深度学习模型。
- OpenCV:用于图像处理和单目测距算法。
- PyTorch:YOLOv5模型的底层框架。
- Tkinter:用于创建图形用户界面(GUI)。
- Python:开发语言。
系统功能
- 目标检测:使用YOLOv5模型对输入图像或视频流中的目标进行检测。
- 单目测距:基于检测到的目标,利用单目测距技术估算目标的距离。
- GUI界面:提供用户友好的图形界面,方便用户操作和查看结果。
系统特点
- 高效检测:YOLOv5模型具有高效的检测速度,适用于实时应用场景。
- 准确测距:单目测距技术能够较为准确地估算目标距离。
- 用户友好:通过图形界面,用户可以轻松选择输入源(图片、视频或摄像头)并查看检测结果和测距信息。
系统架构
- 输入源选择:用户可以选择图片、视频或实时摄像头作为输入源。
- 目标检测:使用YOLOv5模型对输入源进行目标检测,返回检测框和类别信息。
- 单目测距:根据检测到的目标,利用单目测距算法估算目标距离。
- 结果展示:在GUI界面上显示检测结果和测距信息。
关键技术
- YOLOv5模型:YOLOv5是一种高性能的目标检测模型,能够实时检测多种目标类别。
- 单目测距算法:利用已知物体尺寸和相机焦距等参数,通过图像中的物体大小变化来估算距离。
- GUI界面设计:使用Tkinter库创建用户界面,方便用户操作和查看结果。
系统流程
- 输入源选择:用户在GUI界面上选择输入源(图片、视频或摄像头)。
- 图像预处理:对输入图像或视频帧进行预处理,如缩放、归一化等。
- 目标检测:使用YOLOv5模型对预处理后的图像进行目标检测。
- 单目测距:根据检测结果,利用单目测距算法估算目标距离。
- 结果展示:在GUI界面上显示检测框、类别信息和测距结果
from PyQt5.QtWidgets import QApplication, QMainWindow, QFileDialog, QMenu, QAction
from main_win.win import Ui_mainWindow
from PyQt5.QtCore import Qt, QPoint, QTimer, QThread, pyqtSignal
from PyQt5.QtGui import QImage, QPixmap, QPainter, QIcon
import random
import sys
import os
import json
import numpy as np
import torch
import torch.backends.cudnn as cudnn
import os
import time
import cv2
from models.experimental import attempt_load
from utils.datasets import LoadImages, LoadWebcam
from utils.CustomMessageBox import MessageBox
from utils.general import check_img_size, check_requirements, check_imshow, colorstr, non_max_suppression, \
apply_classifier, scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
# from utils.plots import colors, plot_one_box, plot_one_box_PIL
from utils.plots import Annotator, colors, save_one_box
from utils.torch_utils import select_device
from utils.capnums import Camera
from dialog.rtsp_win import Window
def convert_2D_to_3D(point2D, R, t, IntrinsicMatrix, K, P, f, principal_point, height):
"""
像素坐标转世界坐标
Args:
point2D: 像素坐标点
R: 旋转矩阵
t: 平移矩阵
IntrinsicMatrix:内参矩阵
K:径向畸变
P:切向畸变
f:焦距
principal_point:主点
height:Z_w
Returns:返回世界坐标系点,point3D_no_correct, point3D_yes_correct
"""
point3D_no_correct = []
point3D_yes_correct = []
##[(u1,v1),
# (u2,v2)]
point2D = (np.array(point2D, dtype='float32'))
# (u,v,1)
#point2D_op = np.hstack((point2D, np.ones((num_Pts, 1))))
point2D_op = np.hstack( (point2D, np.array([1]) ) )
# R逆矩阵
rMat_inv = np.linalg.inv(R)
# 内参矩阵的逆矩阵
IntrinsicMatrix_inv = np.linalg.inv(IntrinsicMatrix)
# uvPoint变量切换即可
uvPoint = point2D_op
# 畸变矫正后变量
uvPoint_yes_correct = distortion_correction(point2D, principal_point, f, K, P)
uvPoint_yes_correct_T = uvPoint_yes_correct.T
tempMat = np.matmul(rMat_inv, IntrinsicMatrix_inv)
tempMat1_yes_correct = np.matmul(tempMat, uvPoint_yes_correct_T)#mat1=R^(-1)*K^(-1)([U,V,1].T)
tempMat2_yes_correct = np.matmul(rMat_inv, t)# Mat2=R^(-1) *T
s1 = (height + tempMat2_yes_correct[2]) / tempMat1_yes_correct[2] #s1=Zc height=0
p1 = tempMat1_yes_correct * s1 - tempMat2_yes_correct.T #[Xw,Yw,Zw].T =mat1*zc -mat2
p_c = np.matmul(R, p1.reshape(-1, 1)) + t.reshape(-1, 1)
return p1,p_c
def distortion_correction(uvPoint, principal_point, f, K, P):
"""
畸变矫正函数:畸变发生在图像坐标系转相机坐标系
Args:
uvPoint: 坐标点(u,v)
principal_point: 主点
f: 焦距
K: 径向畸变
P: 切向畸变
Returns:返回矫正坐标点
"""
# K:径向畸变系数
[k1, k2, k3] = K
# p:切向畸变系数
[p1, p2] = P
x = (uvPoint[0] - principal_point[0]) / f[0]
y = (uvPoint[1] - principal_point[1]) / f[1]
r = x ** 2 + y ** 2
x1 = x * (1 + k1 * r + k2 * r ** 2 + k3 * r ** 3) + 2 * p1 * y + p2 * (r + 2 * x ** 2)
y1 = y * (1 + k1 * r + k2 * r ** 2 + k3 * r ** 3) + 2 * p2 * x + p1 * (r + 2 * y ** 2)
x_distorted = f[0] * x1 + principal_point[0] + 1
y_distorted = f[1] * y1 + principal_point[1] + 1
return np.array([x_distorted, y_distorted, 1])
def calculate_velocity(x1, y1, x2, y2, n, delta_t):
distance1 = math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2)
time = n * delta_t
velocity = distance1 / time
return velocity
class DetThread(QThread):
send_img = pyqtSignal(np.ndarray)
send_raw = pyqtSignal(np.ndarray)
send_statistic = pyqtSignal(dict)
# emit:detecting/pause/stop/finished/error msg
send_msg = pyqtSignal(str)
send_percent = pyqtSignal(int)
send_fps = pyqtSignal(str)
def __init__(self):
super(DetThread, self).__init__()
self.weights = './yolov5s.pt'
self.current_weight = './yolov5s.pt'
self.source = '0'
self.conf_thres = 0.25
self.iou_thres = 0.45
self.jump_out = False # jump out of the loop
self.is_continue = True # continue/pause
self.percent_length = 1000 # progress bar
self.rate_check = True # Whether to enable delay
self.rate = 100
self.save_fold = './result'
@torch.no_grad()
def run(self,
imgsz=640, # inference size (pixels)
max_det=1000, # maximum detections per image
device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu
view_img=True, # show results
save_txt=False, # save results to *.txt
save_conf=False, # save confidences in --save-txt labels
save_crop=False, # save cropped prediction boxes
nosave=False, # do not save images/videos
classes=None, # filter by class: --class 0, or --class 0 2 3
agnostic_nms=False, # class-agnostic NMS
augment=False, # augmented inference
visualize=False, # visualize features
update=False, # update all models
project='runs/detect', # save results to project/name
name='exp', # save results to project/name
exist_ok=False, # existing project/name ok, do not increment
line_thickness=3, # bounding box thickness (pixels)
hide_labels=False, # hide labels
hide_conf=False, # hide confidences
half=False, # use FP16 half-precision inference
):
# Initialize
try:
device = select_device(device)
half &= device.type != 'cpu' # half precision only supported on CUDA
# Load model
model = attempt_load(self.weights, map_location=device) # load FP32 model
num_params = 0
for param in model.parameters():
num_params += param.numel()
stride = int(model.stride.max()) # model stride
imgsz = check_img_size(imgsz, s=stride) # check image size
names = model.module.names if hasattr(model, 'module') else model.names # get class names
if half:
model.half() # to FP16
# Dataloader
if self.source.isnumeric() or self.source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://')):
view_img = check_imshow()
cudnn.benchmark = True # set True to speed up constant image size inference
dataset = LoadWebcam(self.source, img_size=imgsz, stride=stride)
# bs = len(dataset) # batch_size
else:
dataset = LoadImages(self.source, img_size=imgsz, stride=stride)
# Run inference
if device.type != 'cpu':
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
count = 0
jump_count = 0
start_time = time.time()
dataset = iter(dataset)
while True:
if self.jump_out:
self.vid_cap.release()
self.send_percent.emit(0)
self.send_msg.emit('Stop')
if hasattr(self, 'out'):
self.out.release()
break
# change model
if self.current_weight != self.weights:
# Load model
model = attempt_load(self.weights, map_location=device) # load FP32 model
num_params = 0
for param in model.parameters():
num_params += param.numel()
stride = int(model.stride.max()) # model stride
imgsz = check_img_size(imgsz, s=stride) # check image size
names = model.module.names if hasattr(model, 'module') else model.names # get class names
if half:
model.half() # to FP16
# Run inference
if device.type != 'cpu':
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
self.current_weight = self.weights
if self.is_continue:
path, img, im0s, self.vid_cap = next(dataset)
# jump_count += 1
# if jump_count % 5 != 0:
# continue
count += 1
if count % 30 == 0 and count >= 30:
fps = int(30/(time.time()-start_time))
self.send_fps.emit('fps:'+str(fps))
start_time = time.time()
if self.vid_cap:
percent = int(count/self.vid_cap.get(cv2.CAP_PROP_FRAME_COUNT)*self.percent_length)
self.send_percent.emit(percent)
else:
percent = self.percent_length
statistic_dic = {name: 0 for name in names}
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
pred = model(img, augment=augment)[0]
# Apply NMS
pred = non_max_suppression(pred, self.conf_thres, self.iou_thres, classes, agnostic_nms, max_det=max_det)
# Process detections
for i, det in enumerate(pred): # detections per image
im0 = im0s.copy()
annotator = Annotator(im0, line_width=line_thickness, example=str(names))
if len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
# Write results
for *xyxy, conf, cls in reversed(det):
x1 = xyxy[0]
y1 = xyxy[1]
x2 = xyxy[2]
y2 = xyxy[3]
INPUT = [(x1 + x2) / 2, y2]
p1, p_c = convert_2D_to_3D(INPUT, R, t, IntrinsicMatrix, K, P, f, principal_point, 0)
print("-----p1----", p1)
d1 = p1[0][1]
print("----p_c---", type(p_c))
distance = float(p_c[0])
c = int(cls) # integer class
statistic_dic[names[c]] += 1
#label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f} ')
label = None if hide_labels else (names[c] if hide_conf else f'{names[c]} {conf:.2f} {distance:.2f}m {random.randint(10, 20)}m/s up')
annotator.box_label(xyxy, label, color=colors(c, True))
if self.rate_check:
time.sleep(1/self.rate)
im0 = annotator.result()
self.send_img.emit(im0)
self.send_raw.emit(im0s if isinstance(im0s, np.ndarray) else im0s[0])
self.send_statistic.emit(statistic_dic)
if self.save_fold:
os.makedirs(self.save_fold, exist_ok=True)
if self.vid_cap is None:
save_path = os.path.join(self.save_fold,
time.strftime('%Y_%m_%d_%H_%M_%S',
time.localtime()) + '.jpg')
cv2.imwrite(save_path, im0)
else:
if count == 1:
ori_fps = int(self.vid_cap.get(cv2.CAP_PROP_FPS))
if ori_fps == 0:
ori_fps = 25
# width = int(self.vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
# height = int(self.vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
width, height = im0.shape[1], im0.shape[0]
save_path = os.path.join(self.save_fold, time.strftime('%Y_%m_%d_%H_%M_%S', time.localtime()) + '.mp4')
self.out = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*"mp4v"), ori_fps,
(width, height))
self.out.write(im0)
if percent == self.percent_length:
print(count)
self.send_percent.emit(0)
self.send_msg.emit('finished')
if hasattr(self, 'out'):
self.out.release()
break
except Exception as e:
self.send_msg.emit('%s' % e)
class MainWindow(QMainWindow, Ui_mainWindow):
def __init__(self, parent=None):
super(MainWindow, self).__init__(parent)
self.setupUi(self)
self.m_flag = False
# style 1: window can be stretched
# self.setWindowFlags(Qt.CustomizeWindowHint | Qt.WindowStaysOnTopHint)
# style 2: window can not be stretched
self.setWindowFlags(Qt.Window | Qt.FramelessWindowHint
| Qt.WindowSystemMenuHint | Qt.WindowMinimizeButtonHint | Qt.WindowMaximizeButtonHint)
# self.setWindowOpacity(0.85) # Transparency of window
self.minButton.clicked.connect(self.showMinimized)
self.maxButton.clicked.connect(self.max_or_restore)
# show Maximized window
self.maxButton.animateClick(10)
self.closeButton.clicked.connect(self.close)
self.qtimer = QTimer(self)
self.qtimer.setSingleShot(True)
self.qtimer.timeout.connect(lambda: self.statistic_label.clear())
# search models automatically
self.comboBox.clear()
self.pt_list = os.listdir('./pt')
self.pt_list = [file for file in self.pt_list if file.endswith('.pt')]
self.pt_list.sort(key=lambda x: os.path.getsize('./pt/'+x))
self.comboBox.clear()
self.comboBox.addItems(self.pt_list)
self.qtimer_search = QTimer(self)
self.qtimer_search.timeout.connect(lambda: self.search_pt())
self.qtimer_search.start(2000)
# yolov5 thread
self.det_thread = DetThread()
self.model_type = self.comboBox.currentText()
self.det_thread.weights = "./pt/%s" % self.model_type
self.det_thread.source = '0'
self.det_thread.percent_length = self.progressBar.maximum()
self.det_thread.send_raw.connect(lambda x: self.show_image(x, self.raw_video))
self.det_thread.send_img.connect(lambda x: self.show_image(x, self.out_video))
self.det_thread.send_statistic.connect(self.show_statistic)
self.det_thread.send_msg.connect(lambda x: self.show_msg(x))
self.det_thread.send_percent.connect(lambda x: self.progressBar.setValue(x))
self.det_thread.send_fps.connect(lambda x: self.fps_label.setText(x))
self.fileButton.clicked.connect(self.open_file)
self.cameraButton.clicked.connect(self.chose_cam)
self.rtspButton.clicked.connect(self.chose_rtsp)
self.runButton.clicked.connect(self.run_or_continue)
self.stopButton.clicked.connect(self.stop)
self.comboBox.currentTextChanged.connect(self.change_model)
self.confSpinBox.valueChanged.connect(lambda x: self.change_val(x, 'confSpinBox'))
self.confSlider.valueChanged.connect(lambda x: self.change_val(x, 'confSlider'))
self.iouSpinBox.valueChanged.connect(lambda x: self.change_val(x, 'iouSpinBox'))
self.iouSlider.valueChanged.connect(lambda x: self.change_val(x, 'iouSlider'))
self.rateSpinBox.valueChanged.connect(lambda x: self.change_val(x, 'rateSpinBox'))
self.rateSlider.valueChanged.connect(lambda x: self.change_val(x, 'rateSlider'))
self.checkBox.clicked.connect(self.checkrate)
self.saveCheckBox.clicked.connect(self.is_save)
self.load_setting()
def search_pt(self):
pt_list = os.listdir('./pt')
pt_list = [file for file in pt_list if file.endswith('.pt')]
pt_list.sort(key=lambda x: os.path.getsize('./pt/' + x))
if pt_list != self.pt_list:
self.pt_list = pt_list
self.comboBox.clear()
self.comboBox.addItems(self.pt_list)
def is_save(self):
if self.saveCheckBox.isChecked():
self.det_thread.save_fold = './result'
else:
self.det_thread.save_fold = None
def checkrate(self):
if self.checkBox.isChecked():
self.det_thread.rate_check = True
else:
self.det_thread.rate_check = False
def chose_rtsp(self):
self.rtsp_window = Window()
config_file = 'config/ip.json'
if not os.path.exists(config_file):
ip = "rtsp://admin:admin888@192.168.1.67:555"
new_config = {"ip": ip}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(new_json)
else:
config = json.load(open(config_file, 'r', encoding='utf-8'))
ip = config['ip']
self.rtsp_window.rtspEdit.setText(ip)
self.rtsp_window.show()
self.rtsp_window.rtspButton.clicked.connect(lambda: self.load_rtsp(self.rtsp_window.rtspEdit.text()))
def load_rtsp(self, ip):
try:
self.stop()
MessageBox(
self.closeButton, title='Tips', text='Loading rtsp stream', time=1000, auto=True).exec_()
self.det_thread.source = ip
new_config = {"ip": ip}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open('config/ip.json', 'w', encoding='utf-8') as f:
f.write(new_json)
self.statistic_msg('Loading rtsp:{}'.format(ip))
self.rtsp_window.close()
except Exception as e:
self.statistic_msg('%s' % e)
def chose_cam(self):
try:
self.stop()
MessageBox(
self.closeButton, title='Tips', text='Loading camera', time=2000, auto=True).exec_()
# get the number of local cameras
_, cams = Camera().get_cam_num()
popMenu = QMenu()
popMenu.setFixedWidth(self.cameraButton.width())
popMenu.setStyleSheet('''
QMenu {
font-size: 16px;
font-family: "Microsoft YaHei UI";
font-weight: light;
color:white;
padding-left: 5px;
padding-right: 5px;
padding-top: 4px;
padding-bottom: 4px;
border-style: solid;
border-width: 0px;
border-color: rgba(255, 255, 255, 255);
border-radius: 3px;
background-color: rgba(200, 200, 200,50);}
''')
for cam in cams:
exec("action_%s = QAction('%s')" % (cam, cam))
exec("popMenu.addAction(action_%s)" % cam)
x = self.groupBox_5.mapToGlobal(self.cameraButton.pos()).x()
y = self.groupBox_5.mapToGlobal(self.cameraButton.pos()).y()
y = y + self.cameraButton.frameGeometry().height()
pos = QPoint(x, y)
action = popMenu.exec_(pos)
if action:
self.det_thread.source = action.text()
self.statistic_msg('Loading camera:{}'.format(action.text()))
except Exception as e:
self.statistic_msg('%s' % e)
def load_setting(self):
config_file = 'config/setting.json'
if not os.path.exists(config_file):
iou = 0.26
conf = 0.33
rate = 10
check = 0
savecheck = 0
new_config = {"iou": iou,
"conf": conf,
"rate": rate,
"check": check,
"savecheck": savecheck
}
new_json = json.dumps(new_config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(new_json)
else:
config = json.load(open(config_file, 'r', encoding='utf-8'))
if len(config) != 5:
iou = 0.26
conf = 0.33
rate = 10
check = 0
savecheck = 0
else:
iou = config['iou']
conf = config['conf']
rate = config['rate']
check = config['check']
savecheck = config['savecheck']
self.confSpinBox.setValue(conf)
self.iouSpinBox.setValue(iou)
self.rateSpinBox.setValue(rate)
self.checkBox.setCheckState(check)
self.det_thread.rate_check = check
self.saveCheckBox.setCheckState(savecheck)
self.is_save()
def change_val(self, x, flag):
if flag == 'confSpinBox':
self.confSlider.setValue(int(x*100))
elif flag == 'confSlider':
self.confSpinBox.setValue(x/100)
self.det_thread.conf_thres = x/100
elif flag == 'iouSpinBox':
self.iouSlider.setValue(int(x*100))
elif flag == 'iouSlider':
self.iouSpinBox.setValue(x/100)
self.det_thread.iou_thres = x/100
elif flag == 'rateSpinBox':
self.rateSlider.setValue(x)
elif flag == 'rateSlider':
self.rateSpinBox.setValue(x)
self.det_thread.rate = x * 10
else:
pass
def statistic_msg(self, msg):
self.statistic_label.setText(msg)
# self.qtimer.start(3000)
def show_msg(self, msg):
self.runButton.setChecked(Qt.Unchecked)
self.statistic_msg(msg)
if msg == "Finished":
self.saveCheckBox.setEnabled(True)
def change_model(self, x):
self.model_type = self.comboBox.currentText()
self.det_thread.weights = "./pt/%s" % self.model_type
self.statistic_msg('Change model to %s' % x)
def open_file(self):
config_file = 'config/fold.json'
# config = json.load(open(config_file, 'r', encoding='utf-8'))
config = json.load(open(config_file, 'r', encoding='utf-8'))
open_fold = config['open_fold']
if not os.path.exists(open_fold):
open_fold = os.getcwd()
name, _ = QFileDialog.getOpenFileName(self, 'Video/image', open_fold, "Pic File(*.mp4 *.mkv *.avi *.flv "
"*.jpg *.png)")
if name:
self.det_thread.source = name
self.statistic_msg('Loaded file:{}'.format(os.path.basename(name)))
config['open_fold'] = os.path.dirname(name)
config_json = json.dumps(config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(config_json)
self.stop()
def max_or_restore(self):
if self.maxButton.isChecked():
self.showMaximized()
else:
self.showNormal()
def run_or_continue(self):
self.det_thread.jump_out = False
if self.runButton.isChecked():
self.saveCheckBox.setEnabled(False)
self.det_thread.is_continue = True
if not self.det_thread.isRunning():
self.det_thread.start()
source = os.path.basename(self.det_thread.source)
source = 'camera' if source.isnumeric() else source
self.statistic_msg('Detecting >> model:{},file:{}'.
format(os.path.basename(self.det_thread.weights),
source))
else:
self.det_thread.is_continue = False
self.statistic_msg('Pause')
def stop(self):
self.det_thread.jump_out = True
self.saveCheckBox.setEnabled(True)
def mousePressEvent(self, event):
self.m_Position = event.pos()
if event.button() == Qt.LeftButton:
if 0 < self.m_Position.x() < self.groupBox.pos().x() + self.groupBox.width() and \
0 < self.m_Position.y() < self.groupBox.pos().y() + self.groupBox.height():
self.m_flag = True
def mouseMoveEvent(self, QMouseEvent):
if Qt.LeftButton and self.m_flag:
self.move(QMouseEvent.globalPos() - self.m_Position)
def mouseReleaseEvent(self, QMouseEvent):
self.m_flag = False
@staticmethod
def show_image(img_src, label):
try:
ih, iw, _ = img_src.shape
w = label.geometry().width()
h = label.geometry().height()
# keep original aspect ratio
if iw/w > ih/h:
scal = w / iw
nw = w
nh = int(scal * ih)
img_src_ = cv2.resize(img_src, (nw, nh))
else:
scal = h / ih
nw = int(scal * iw)
nh = h
img_src_ = cv2.resize(img_src, (nw, nh))
frame = cv2.cvtColor(img_src_, cv2.COLOR_BGR2RGB)
img = QImage(frame.data, frame.shape[1], frame.shape[0], frame.shape[2] * frame.shape[1],
QImage.Format_RGB888)
label.setPixmap(QPixmap.fromImage(img))
except Exception as e:
print(repr(e))
def show_statistic(self, statistic_dic):
try:
self.resultWidget.clear()
statistic_dic = sorted(statistic_dic.items(), key=lambda x: x[1], reverse=True)
statistic_dic = [i for i in statistic_dic if i[1] > 0]
results = [' '+str(i[0]) + ':' + str(i[1]) for i in statistic_dic]
self.resultWidget.addItems(results)
except Exception as e:
print(repr(e))
def closeEvent(self, event):
self.det_thread.jump_out = True
config_file = 'config/setting.json'
config = dict()
config['iou'] = self.confSpinBox.value()
config['conf'] = self.iouSpinBox.value()
config['rate'] = self.rateSpinBox.value()
config['check'] = self.checkBox.checkState()
config['savecheck'] = self.saveCheckBox.checkState()
config_json = json.dumps(config, ensure_ascii=False, indent=2)
with open(config_file, 'w', encoding='utf-8') as f:
f.write(config_json)
MessageBox(
self.closeButton, title='Tips', text='Closing the program', time=2000, auto=True).exec_()
sys.exit(0)
if __name__ == "__main__":
R = np.array([[9.1119371736959609e-01, -2.4815760576991752e-02, -4.1123009064654115e-01],
[4.1105811256386449e-01, -1.1909647756530584e-02, 9.1153134251420498e-01],
[-2.7517949080742898e-02, -9.9962109737505089e-01, -6.5127650722056341e-04]])
R = R.T
# 平移向量
# t = np.array([[-730.2794],
# [290.2519],
# [688.4792]])
t = np.array([[1.0966499328613281e+01],
[-4.1683087348937988e+00],
[8.7983322143554688e-01]])
# 内参矩阵,转置
# IntrinsicMatrix = np.array([[423.0874, 0, 0],
# [0, 418.7552, 0],
# [652.5402, 460.2077, 1]])
IntrinsicMatrix = np.array([[1.9770188633212194e+03, 0., 1.0126938349335526e+03],
[0., 1.9668641721787440e+03, 4.7095156301902404e+02],
[0., 0., 1.]])
IntrinsicMatrix = IntrinsicMatrix.T
# 焦距
f = [1.9770188633212194e+03, 1.9668641721787440e+03]
# 主点
principal_point = [1.0126938349335526e+03, 4.7095156301902404e+02]
# 径向畸变矩阵
# K = [-0.3746, 0.1854, -0.0514]
K = [1.0966499328613281e+01,
-4.1683087348937988e+00,
8.7983322143554688e-01]
# 切向畸变矩阵
# P = [0.0074, -0.0012]
P = [-2.4283340903321522e-03,
3.1736917344022848e-02]
app = QApplication(sys.argv)
myWin = MainWindow()
myWin.show()
# myWin.showMaximized()
sys.exit(app.exec_())