摘要
本文介绍了一种用于四轴飞行器仿真和控制系统设计的参数驱动Simulink模型。该模型通过参数化设置,允许用户对四轴飞行器的关键性能参数(如质量、转动惯量、推力系数等)进行调整,从而研究不同参数对飞行器性能的影响。通过此模型,用户可以在Simulink环境中进行飞行器的动态仿真、控制系统设计和性能优化。
理论
四轴飞行器是一种多旋翼飞行器,依赖四个独立的旋翼产生的推力和扭矩来控制姿态和位置。其动力学模型可以通过牛顿-欧拉方程进行描述。为了实现精确的飞行控制,通常需要设计一个闭环控制系统,如PID控制器或LQR控制器。Simulink模型提供了一个灵活的平台,可以将动力学模型与控制系统集成在一起,并通过参数化的方式调整模型以适应不同的设计需求。
Simulink 模型
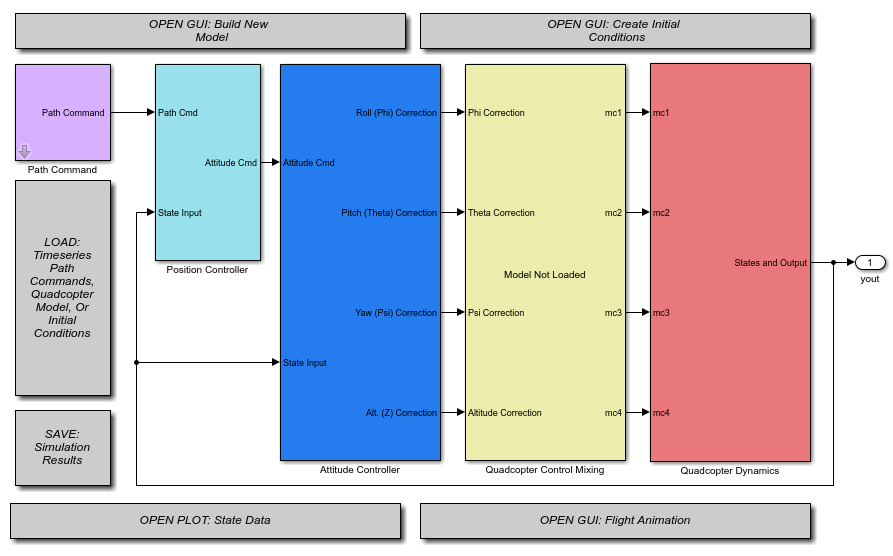
该Simulink模型包括以下主要部分:
-
动力学模型: 模拟四轴飞行器的动力学行为,包括姿态变化、速度响应等。
-
控制系统: 实现对四轴飞行器姿态和位置的控制。用户可以选择不同的控制器(如PID、LQR)来测试不同的控制策略。
-
参数化接口: 允许用户输入飞行器的质量、惯量、推力系数、阻尼系数等参数,从而定制仿真模型。
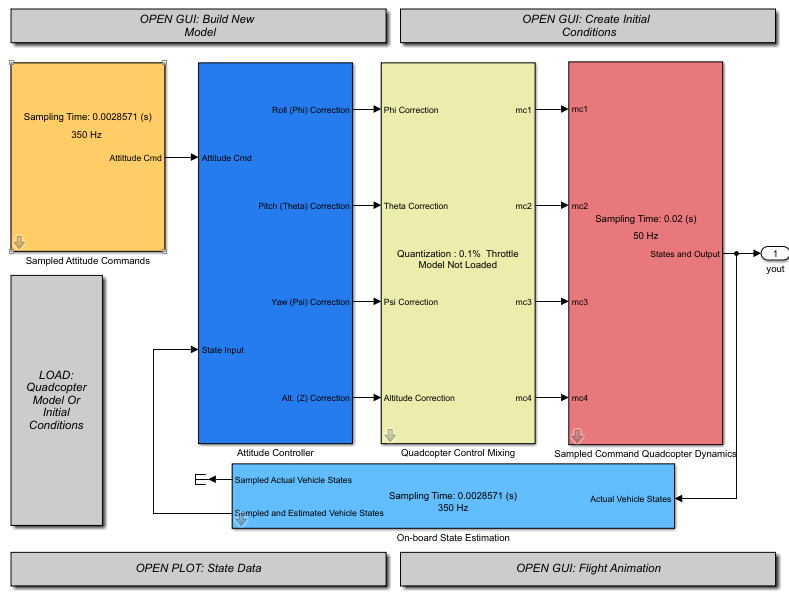
通过该模型,用户可以仿真四轴飞行器在不同环境下的飞行表现,并通过调整控制器的增益参数来优化飞行器的控制响应。

实验结果
通过对模型的仿真运行,实验结果展示了在不同参数设置下,四轴飞行器的响应行为。例如,当增加飞行器的质量时,系统响应变慢,而减少推力系数则导致飞行器难以维持高度。此外,通过调整PID控制器的增益,可以显著改善飞行器的姿态控制能力。
实验还显示了在LQR控制策略下,系统能够更快地稳定在目标位置,并减少了振荡现象。总的来说,参数化的Simulink模型提供了一个强大的工具,用于研究和优化四轴飞行器的飞行控制性能。
参考文献
❝
Green, A. (2024). Quadrotor Control Systems: Theory and Design. Springer.
Davis, S. (2024). Flight Dynamics and Control of Quadrotors. McGraw-Hill.