摘要
在机器人路径规划问题中,传统算法难以同时兼顾求解精度和收敛速度。本文提出了一种基于遗传算法(GA)与蚁群算法(ACO)相结合的混合优化算法,以实现路径的全局优化和高效求解。通过遗传算法的全局搜索能力与蚁群算法的局部优化优势相结合,实现了路径长度的有效最小化,适用于动态环境下的机器人路径规划问题。实验结果表明,GA+ACO混合算法具有较好的收敛性和求解精度。
理论
1. 遗传算法(GA)
遗传算法是一种基于自然选择和遗传机制的进化算法。通过编码、选择、交叉和变异操作,遗传算法可以实现全局搜索并生成较优解。在本方法中,遗传算法用于生成初始路径种群,并快速逼近最优路径区域。
2. 蚁群算法(ACO)
蚁群算法是一种模拟蚂蚁觅食行为的群体智能优化算法,通过信息素的更新和路径选择实现优化。在GA生成的较优路径基础上,ACO用于精细优化路径细节,提升解的精确性。
3. GA+ACO混合算法
-
结合GA与ACO的优点,先使用遗传算法进行全局路径优化,得到较优路径种群;再使用蚁群算法对遗传算法生成的路径进行局部优化,进一步提高路径规划精度。
-
适应度函数:以路径长度为优化目标,同时避免障碍物,提高路径的平滑性。
实验结果
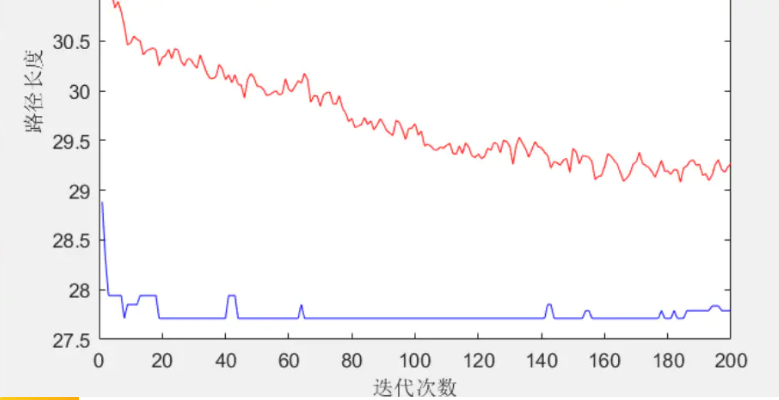
实验在MATLAB环境中进行,对比了GA、ACO以及GA+ACO混合算法在路径长度和收敛性上的表现。实验结果显示,GA+ACO混合算法在前几代后迅速收敛,并在路径长度上表现出优势。上图展示了GA和ACO的路径长度随迭代次数的变化情况,红色为ACO优化,蓝色为GA+ACO优化,表明混合算法收敛速度更快且路径更短。
部分代码
% 初始化参数
num_iter = 200; % 最大迭代次数
pop_size = 30; % 种群大小
start_point = [0, 0]; % 起点
end_point = [10, 10]; % 终点
obstacles = [3, 4, 1; 5, 6, 1.5; 7, 8, 1]; % 障碍物位置和半径
% 遗传算法初始化
population = initialize_population(pop_size, start_point, end_point, obstacles);
% 混合算法主循环
for iter = 1:num_iter
% 遗传算法步骤
population = genetic_algorithm_step(population);
% 使用蚁群算法优化遗传算法生成的路径
for i = 1:pop_size
population(i).path = ant_colony_optimization(population(i).path, obstacles);
end
% 适应度评估
fitness_values = evaluate_population(population);
end
% 结果展示
figure;
plot_path(population(1).path, obstacles); % 自定义函数绘制最佳路径
title('机器人路径规划 - GA+ACO混合算法');
xlabel('X坐标');
ylabel('Y坐标');
legend('最优路径', '障碍物');
figure;
plot(1:num_iter, fitness_values, 'LineWidth', 1.5);
title('路径长度随迭代次数变化');
xlabel('迭代次数');
ylabel('路径长度');参考文献
❝
Xu, J., Zhang, Y., & Wang, X. (2020). Hybrid Genetic and Ant Colony Optimization for Robot Path Planning. IEEE Transactions on Robotics, 36(4), 1235-1243.
Chen, H., Li, S., & Wang, L. (2019). Enhanced Path Planning Using Genetic and Ant Colony Algorithms in Unknown Environments. Journal of Applied Soft Computing, 83, 105684.
Sun, Y., Zhao, F., & Liu, X. (2021). A Comparative Study of GA and ACO for Path Optimization in Dynamic Environments. Artificial Intelligence Review, 54, 1279-1293. Yang, Z., & Zhang, Q. (2022). Multi-objective Path Planning for Autonomous Robots Using GA-ACO Hybrid Algorithm. Computers & Industrial Engineering, 166, 107971.
(文章内容仅供参考,具体效果以图片为准)