
时序要求
BT.1120视频用于1920x1080@30Hz数字视频输入。具体时序必须严格按照说明。BT.1120输入电平为1.8V。
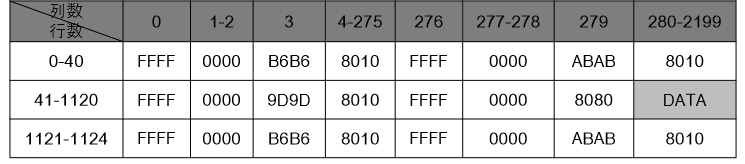
BT1120数字视频采用YCbCr彩色格式输出,串行数据位宽为16bit,亮度在 高8bit,色度在低8bit,亮度和色度在同一个时钟周期输出。采用1080P@30Hz 标准BT1120格式,时钟频率74.25MHz,帧频30Hz,每行像素点个数2200,共 1125行,即2200×1125×30Hz=74.25MHz。
行方向上0-40与1121-1124即前41行与后4行为 消隐行,41-1120即中间1080行为有效行;列方向上4-275为消隐列,0-3为视 频结束基准码EAV,276-279为视频开始基准码SAV,280-2199即最后1920列 为有效列。在消隐行上,EAV对应FFFF、0000、B6B6,SAV对应FFFF、0000、 ABAB,消隐列与有效列对应8010;在有效行上,EAV对应FFFF、0000、9D9D, SAV对应FFFF、0000、8080,消隐列对应8010,有效列对应有效数据。
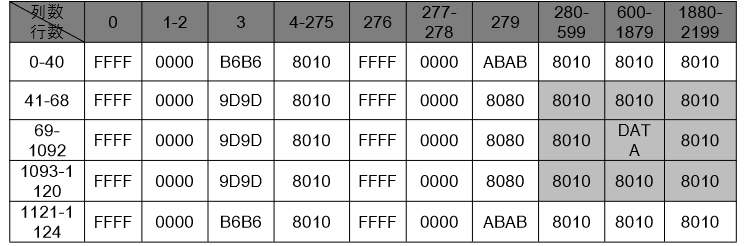
当BT.1120用于1280x1024分辨率热红外视频输入时,图像中间部分为有效数据其余部分涂黑处理,如下表。
接口要求
接收端接口采用FPC30P 0.5mm间距,接收端使用抽屉式上接方式。
接口板型号为TofuT1,尺寸为45x45mm或38x38mm。
接口定义如下表。

|----------|----------------|---------------------|
| 序号 | 定义 | 说明 |
| 1,2,3 | VCC | 电源输出,默认4VDC,不超过5W |
| 4,5,6 | GND | 电源地 |
| 7 | UART_RXD(3.3V) | 串口通信收(AI不做解析,只对外转发) |
| 8 | UART_TXD(3.3V) | 串口通信发(AI不做解析,只对外转发) |
| 9,10 | GND | 信号地 |
| 11 | DATA0 | 数据0 |
| 12 | DATA1 | 数据1 |
| ... | ... | ... |
| 26 | DATA15 | 数据15 |
| 27,28,29 | NC | 不连接 |
| 30 | CLK | 时钟 (接口板上默认有上拉电阻) |